一、Carla-ROS-Bridge的下载与安装
1.进入到carla目录下
cd ~/carla
2.下载
git clone https://github.com/carla-simulator/ros-bridge.git --recursive
注:下载不了可以挂梯子
3.创建ros_ws/src
mkdir -p ros_ws/src
cd ros_ws/src
ln -s ../../ros-bridge carla-ros-bridge
4.编译
cd ..
catkin_make
遇到如下错误:Could not find a package configuration file provided by " ackernann_nsgs"with any of the following names:
ackermann_msgsConfig.cnake
ackermann_msgs-config.cnake
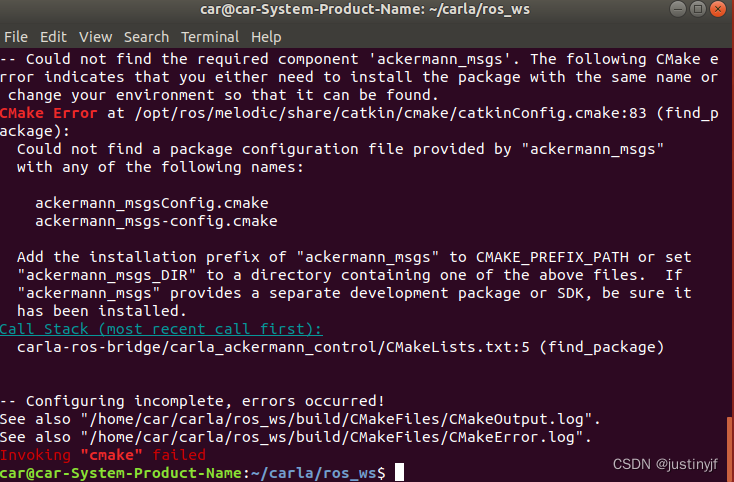
解决方法:
安装如下内容:
ros-melodic-tf2-geometry-msgs
ros-melodic-ackermann-msgs
ros-melodic-joy
ros-melodic-map-server
sudo apt-get install ros-melodic-tf2-geometry-msgs ros-melodic-ackermann-msgs ros-melodic-joy ros-melodic-map-server
安装完成继续编译,报错:Could not find a package configuration file provided by"derived_object_msgs" with any of the following names:
derived_object_msgsConfig.cmake
derived_object_msgs-config.cmake
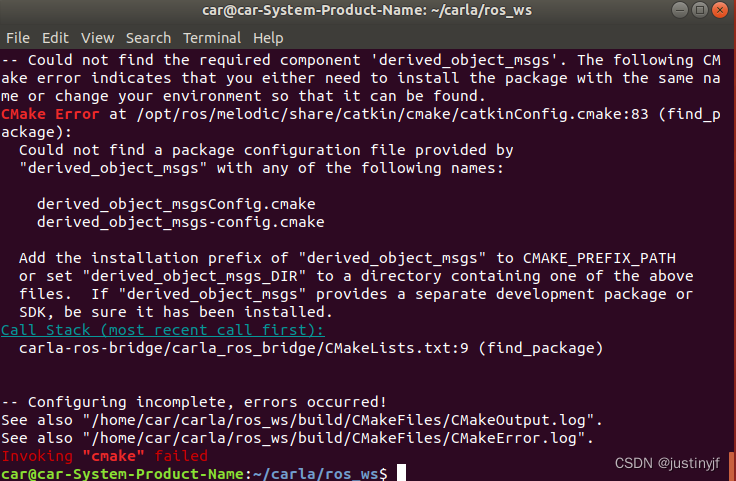
安装以下内容解决:
sudo apt-get install ros-melodic-astuff-sensor-msgs
继续重新编译,成功!
运行ad_demo
source devel/setup.bash
roslaunch carla_ad_demo carla_ad_demo.launch
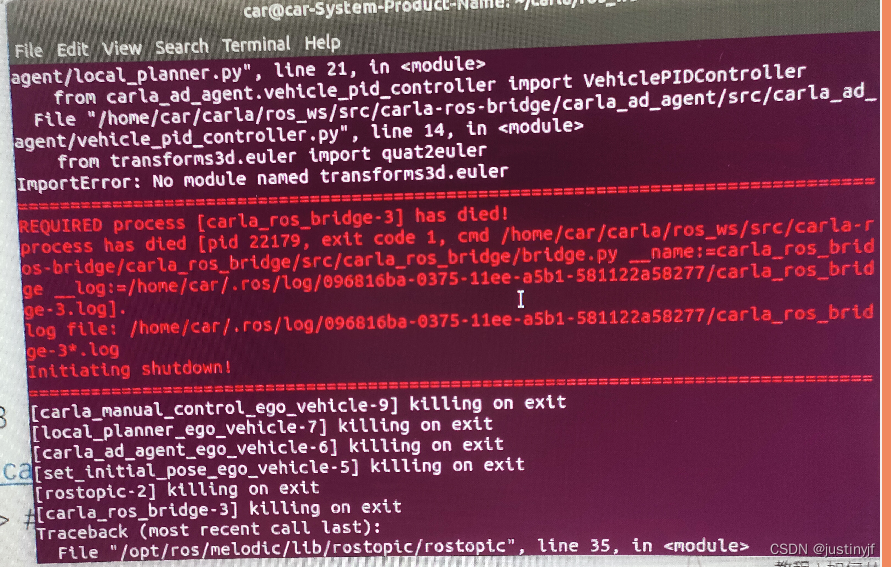
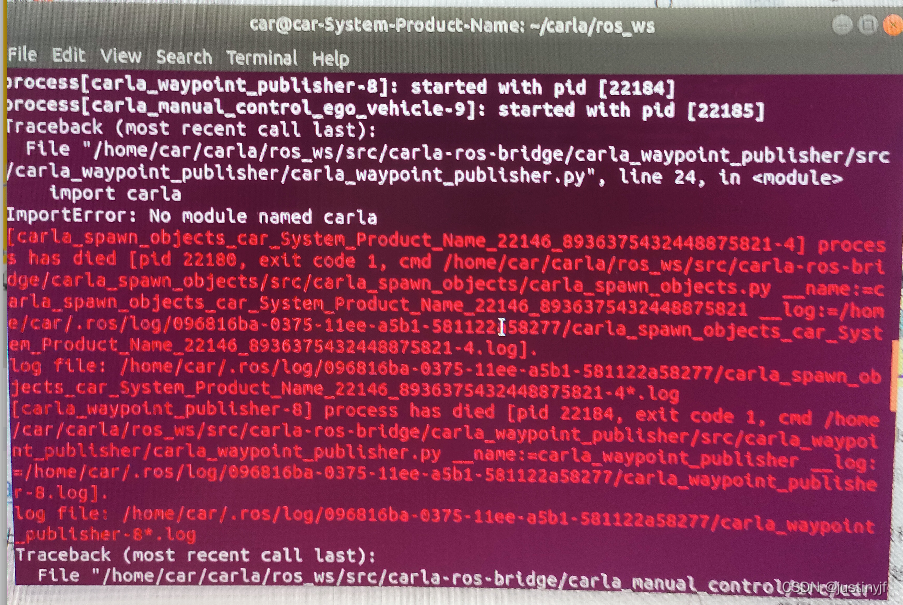
出现报错,缺少carla以及transforms3d模块
ImportError: No module named transforms3d.euler
ImportError: No module named carla
输入以下指令安装
sudo pip install carla
sudo pip install transforms3d
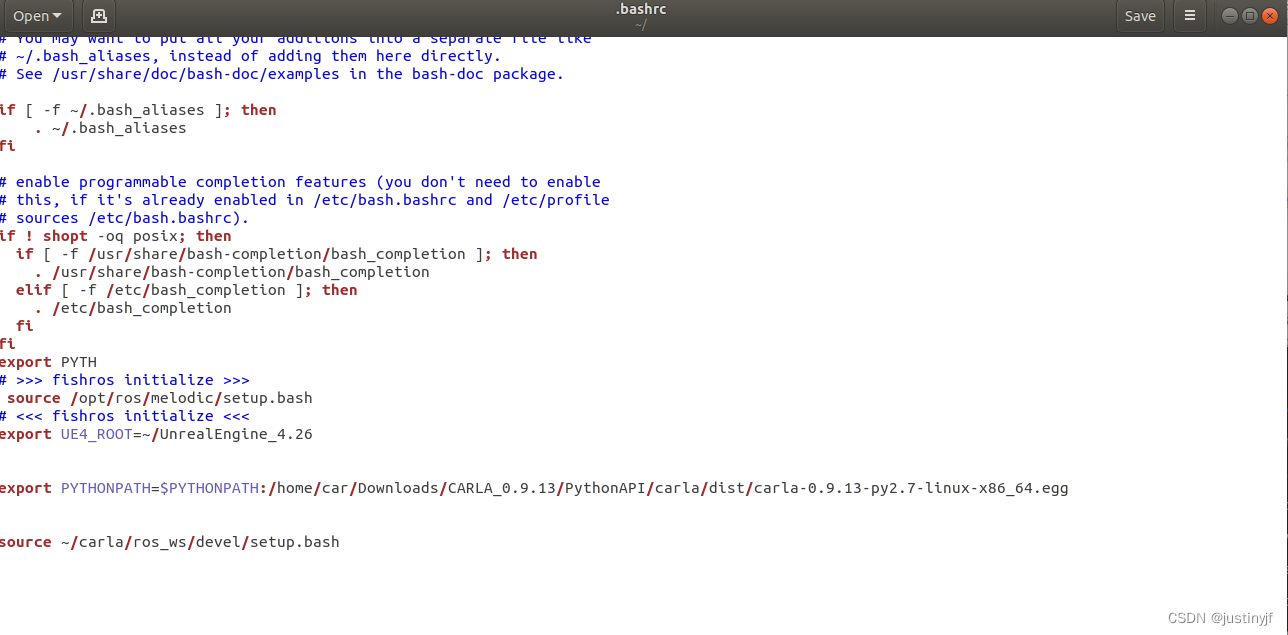
并将指定路径加入全局
export PYTHONPATH=$PYTHONPATH:/home/car/Downloads/CARLA_0.9.13/PythonAPI/carla/dist/carla-0.9.13-py2.7-linux-x86_64.egg
错误成功解决。
继续roslaunch
roslaunch carla_ad_demo carla_ad_demo.launch
运行成功

二、导入自带的额外地图
1.在~/CARLA_0.9.13路径下打开carla
./CarlaUE4.sh
2.在~/CARLA_0.9.13/PythonAPI/util路径下查看地图
python config.py --list
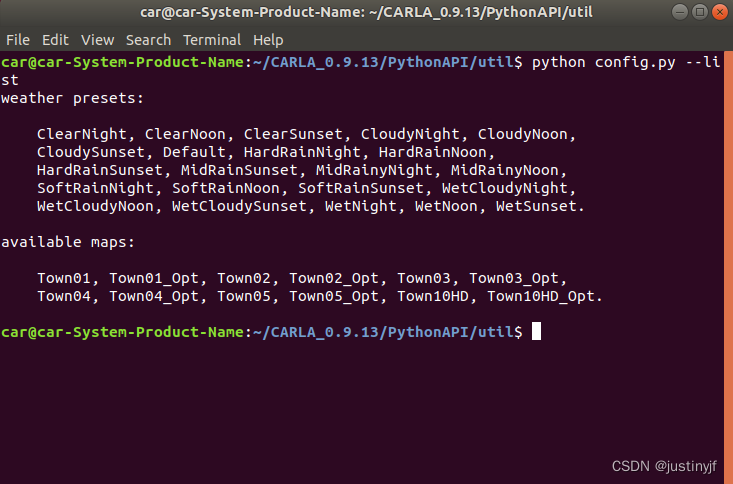
只有1,2,3,4,5,10
去官网下载额外地图
additionalmaps
将压缩包放入~/CARLA_0.9.13/Import文件夹
在~/CARLA_0.9.13路径下打开终端
./ImportAssets.sh
加载完成后就有地图6和7
再次查看地图信息,发现有6和7
python config.py --list
在~/CARLA_0.9.13/PythonAPI/util路径下输入以下指令就可以更换新的地图(比如地图6)
python config.py -m Town06


地图加载成功!