目录
储备知识:
1. 坐标系基本知识:
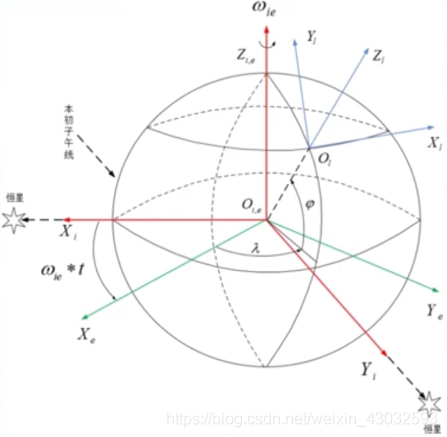
图中,红色坐标系为惯性坐标系(i系):原点是地球中心,x与y轴在地球赤道平面内相互垂直,分别指向相应的恒星,z轴是地球的自转轴。
绿色坐标系为地球坐标系(e系):原点是地球中心,x与y在地球赤道平面内相互垂直,z值指向本初子午线。e系与地球固连,随着地球自转相对于i系旋转。
蓝色坐标系为地理坐标系(g系):又称为当地水平坐标系,通常使用的是“东北天”坐标系和“北东地”坐标系。“东北天”坐标系的原点是站心(一般初始位置),x轴指向东方,y轴指向北方,z指向是铅锤方向向天。横滚角,俯仰角,偏航角均定义在地理坐标系下。
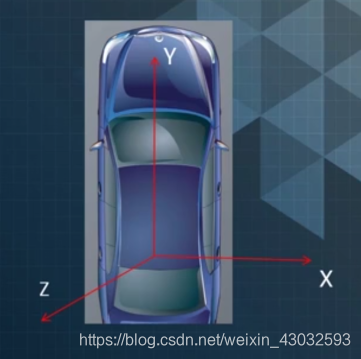
载体坐标系(b系):载体坐标系与载体固连,坐标原点是载体中心,x轴沿载体横轴向右,y轴沿载体纵轴向前,z轴沿载体立轴向上。
导航坐标系(n系):在惯导和组合导航中,导航坐标系通常选用地理坐标系,例如“东北天”坐标系。
2. 四元数与欧拉角的转换:
欧拉角转四元数:

struct Quaternion
{
double w,x,y,z;
}q;
//欧拉角转四元数
void Euler_to_Quaternion(double yaw,double pitch,double roll)
{
double cy = cos(yaw * 0.5);
double sy = sin(yaw * 0.5);
double cp = cos(pitch * 0.5);
double sp = sin(pitch * 0.5);
double cr = cos(roll * 0.5);
double sr = sin(roll * 0.5);
q.w = cy * cp * cr + sy * sp * sr;
q.x = cy * cp * sr - sy * sp * cr;
q.y = sy * cp * sr + cy * sp * cr;
q.z = sy * cp * cr - cy * sp * sr;
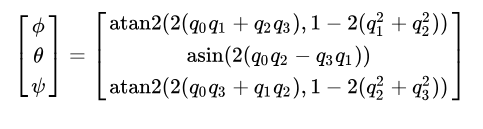
}四元数转欧拉角:
其中φ为roll角度 θ为pitch角度 为yaw角度
#define M_PI 3.141592f
struct Quaternion
{
double w,x,y,z;
};
struct EulerAngles
{
double roll,pitch,yaw;
}angles;
void Quaternion_to_Euler(struct Quaternion q)
{
//roll
double sinr_cosp = 2 * (q.w * q.x + q.y * q.z);
double cosr_cosp = 1 - 2 * (q.x * q.x + q.y * q.y);
angles.roll = atan2(sinr_cosp, cosr_cosp);
// pitch
double sinp = 2 * (q.w * q.y - q.z * q.x);
if (fabs(sinp) >= 1)
angles.pitch = copysign(M_PI / 2, sinp); // use 90 degrees if out of range
else
angles.pitch = asin(sinp);
// yaw
double siny_cosp = 2 * (q.w * q.z + q.x * q.y);
double cosy_cosp = 1 - 2 * (q.y * q.y + q.z * q.z);
angles.yaw = atan2(siny_cosp, cosy_cosp);
}3. 欧拉角表示的坐标变换矩阵:
b系转到n系:

4. 四元数表示的坐标变换矩阵:
b系转到n系:

5. 欧拉角和四元数表示的坐标变换之间的转换关系:


欧拉角表示四元数的公式:

四元数表示欧拉角的公式:

了解了上述基础知识,就来看IMU如何获取角度的吧!!!!
IMU6轴融合算法:
基础理论和原理在这里不再赘述,不懂的友友可以看这篇文章https://blog.csdn.net/shao15232/article/details/101777722![]() https://blog.csdn.net/shao15232/article/details/101777722代码部分:
https://blog.csdn.net/shao15232/article/details/101777722代码部分:
#define Kp 10.0f //PI控制器的比例系数
#define Ki 0.008f //PI控制器的积分系数
#define halfT 0.001f //采样周期的一半
float q0=1,q1=1,q2=0,q3=0; //四元数初始化
float exlnt=0,eylnt=0,eylnt = 0; //向量积误差初始化
struct Q_angle
{
float roll;
float pitch;
float yaw;
};
void IMUupdate(float gx,float gy,float gz,float ax,float ay,float az)
{
float norm;
float vx,vy,vz;
float ex,ey,ez;
float q0q0 = q0*q0;
float q0q1 = q0*q1;
float q0q2 = q0*q2;
float q0q3 = q0*q3;
float q1q1 = q1*q1;
float q1q2 = q1*q2;
float q1q3 = q1*q3;
float q2q2 = q2*q2;
float q2q3 = q2*q3;
float q3q3 = q3*q3;
if(ax*ay*az ==0)
return;
norm = sqrt(ax*ax+ay*ay+az*az);
//b系的加速度值单位化
ax = ax/norm;
ay = ay/norm;
az = az/norm;
//n系中的g理论输出转至b系的值
vx = 2*(q1q3-q0q2);
vy = 2*(q0q1+q2q3);
vz = q0q0-q1q1-q2q2+q3q3;
//将n系中的g理论输出转至b系的值和b系中的加速度计值进行向量叉乘 得到向量积误差
ex = (ay*vz - az*vy) ;
ey = (az*vx - ax*vz) ;
ez = (ax*vy - ay*vx) ;
//对误差进行积分
exlnt = exlnt + ex * Ki;
eyInt = eyInt + ey * Ki;
ezInt = ezInt + ez * Ki;
//计算负补偿后b系中陀螺仪的输出
gx = gx + Kp*ex + exlnt;
gy = gy + Kp*ey + eylnt;
gz = gz + Kp*ez + ezlnt;
//四元素的微分方程
q0 = q0 + (-q1*gx - q2*gy - q3*gz)*halfT;
q1 = q1 + (q0*gx + q2*gz - q3*gy)*halfT;
q2 = q2 + (q0*gy - q1*gz + q3*gx)*halfT;
q3 = q3 + (q0*gz + q1*gy - q2*gx)*halfT;
//单位化四元数
norm = sqrt(q0*q0+q1*q1+q2*q2+q3*q3);
q0 = q0/norm;
q1 = q1/norm;
q2 = q2/norm;
q3 = q3/norm;
//四元数转欧拉角(角度制)
Q_ANGLE.yaw = atan2(2 * q1 * q2 + 2 * q0 * q3, -2 * q2*q2 - 2 * q3* q3 + 1)* 57.3; // yaw
Q_ANGLE.pitch = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; // pitch
Q_ANGLE.roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; // roll
}IMU9轴融合算法:
#define Kp 10.0f //PI控制器的比例系数
#define Ki 0.008f //PI控制器的积分系数
#define halfT 0.001f //采样周期的一半
float q0=1,q1=1,q2=0,q3=0; //四元数初始化
float exlnt=0,eylnt=0,eylnt = 0; //向量积误差初始化
struct Q_angle
{
float roll;
float pitch;
float yaw;
};
void IMUupdate(float gx,float gy,float gz,float ax,float ay,float az,float mx,float my,float mz)
{
float norm;
float hx,hy,hz,bx,bz;
float wx,wy,wz;
float vx,vy,vz;
float ex,ey,ez;
float q0q0 = q0*q0;
float q0q1 = q0*q1;
float q0q2 = q0*q2;
float q0q3 = q0*q3;
float q1q1 = q1*q1;
float q1q2 = q1*q2;
float q1q3 = q1*q3;
float q2q2 = q2*q2;
float q2q3 = q2*q3;
float q3q3 = q3*q3;
if(ax*ay*az ==0)
return;
if(mx*my*mz==0)
return;
//b系的加速度值单位化
norm = sqrt(ax*ax+ay*ay+az*az);
ax = ax/norm;
ay = ay/norm;
az = az/norm;
//b系磁力计数据归一化
norm = sqrt(mx*mx+my*my+mz*mz);
mx = mx/norm;
my = my/norm;
mz = mz/norm;
//计算b系转到n系的磁力计数据
hx = 2 * mx * (0.5 - q2q2 - q3q3) + 2 * my * (q1q2 - q0q3) + 2 * mz * (q1q3 + q0q2);
hy = 2 * mx * (q1q2 + q0q3) + 2 * my * (0.5 - q1q1 - q3q3) + 2 * mz * (q2q3 - q0q1);
hz = 2 * mx * (q1q3 - q0q2) + 2 * my * (q2q3 + q0q1) + 2 * mz * (0.5 - q1q1 -q2q2);
//将原始n系的磁力计数据转换到新的n系 其中x轴指向正北方向
bx = sqrt((hx*hx)+(hy*hy));
by = 0;
bz = hz;
//将新的n系下的磁力计数据转化为b系的数据
wx = 2 * bx * (0.5 - q2q2 - q3q3) + 2 * bz * (q1q3 - q0q2);
wy = 2 * bx * (q1q2 - q0q3) + 2 * bz * (q0q1 + q2q3);
wz = 2 * bx * (q0q2 + q1q3) + 2 * bz * (0.5 - q1q1 - q2q2);
//n系中的重力加速度理论输出转至b系的值
vx = 2*(q1q3-q0q2);
vy = 2*(q0q1+q2q3);
vz = q0q0-q1q1-q2q2+q3q3;
//将n系中的g理论输出转至b系的值和b系中的加速度计值进行向量叉乘 得到向量积误差
//将最新的b系的数据叉乘原始b系中磁力计数据
//误差由上面两部分组成
ex = (ay*vz - az*vy) + (my*wz - mz*wy);
ey = (az*vx - ax*vz) + (mz*wx - mx*wz);
ez = (ax*vy - ay*vx) + (mx*wy - my*wx);
//对误差进行积分
exlnt = exlnt + ex * Ki;
eyInt = eyInt + ey * Ki;
ezInt = ezInt + ez * Ki;
//计算负补偿后b系中陀螺仪的输出
gx = gx + Kp*ex + exlnt;
gy = gy + Kp*ey + eylnt;
gz = gz + Kp*ez + ezlnt;
//四元素的微分方程
q0 = q0 + (-q1*gx - q2*gy - q3*gz)*halfT;
q1 = q1 + (q0*gx + q2*gz - q3*gy)*halfT;
q2 = q2 + (q0*gy - q1*gz + q3*gx)*halfT;
q3 = q3 + (q0*gz + q1*gy - q2*gx)*halfT;
//单位化四元数
norm = sqrt(q0*q0+q1*q1+q2*q2+q3*q3);
q0 = q0/norm;
q1 = q1/norm;
q2 = q2/norm;
q3 = q3/norm;
//四元数转欧拉角(角度制)
Q_ANGLE.yaw = atan2(2 * q1 * q2 + 2 * q0 * q3, -2 * q2*q2 - 2 * q3* q3 + 1)* 57.3; // yaw
Q_ANGLE.pitch = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; // pitch
Q_ANGLE.roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; // roll
}卡尔曼滤波:
原理不再赘述,不懂的友友请看:
/* Q_angle 加速度计的过程噪声方差
Q_bias 陀螺仪漂移的过程噪声方差
R_measure 测量噪声的方差
angle 通过卡尔曼滤波器计算出来的角度 是2*1矩阵的一部分
bias 通过卡尔曼滤波器计算出来的陀螺仪角速度偏差 是2*1矩阵的一部分
P[2][2] 误差协方差矩阵 是个2*2的矩阵
*/
float Q_angle = 0.001f;
float Q_bias = 0.003f;
float R_measure = 0.03f;
float angle = 0.0f;
float bias = 0.0f;
float P[2][2];
P[0][0] = 0.0f;
P[0][1] = 0.0f;
P[1][0] = 0.0f;
P[1][1] = 0.0f;
float Kalmen_getAngle(float newAngle,float newRate,float dt)
{
//角速度 = 当前陀螺仪测得的角速度-陀螺仪角速度偏差量
rate = newRate - bias;
//角度 += 时间*角速度
angle += dt * rate;
//计算当前误差协方差矩阵
/* P[0][0] P[0][1]
P[1][0] P[1][1]
*/
P[0][0] += dt * (dt*P[1][1] - P[0][1] - P[1][0] + Q_angle);
P[0][1] -= dt * P[1][1];
P[1][0] -= dt * P[1][1];
P[1][1] += Q_bias * dt;
//计算残差的协方差
float S = P[0][0] + R_measure;
//计算卡尔曼增益
float K[2];
K[0] = P[0][0] / S;
K[1] = P[1][0] / S;
//计算残差
float y = newAngle - angle;
//进行迭代预测
angle += K[0] * y;
bias += K[1] * y;
//计算后验估计对应的误差协方差矩阵
float P00_temp = P[0][0];
float P01_temp = P[0][1];
P[0][0] -= K[0] * P00_temp;
P[0][1] -= K[0] * P01_temp;
P[1][0] -= K[1] * P00_temp;
P[1][1] -= K[1] * P01_temp;
return angle;
}