目录
一.imu_tk标定时出现的错误(一大堆错误,类似语法问题)
1. IMU设置
开源标定包标定imu,标定结果修改配置文件
ros读imu数据_好人cc的博客-CSDN博客_ros如何读取imu数据
2.雷达设置
rs雷达串口绑定,开启节点后收发数据正常即可
rs-lidar-16电脑运行过程_好人cc的博客-CSDN博客
3.修改配置
雷达转换,相关配置文件修改
lio_sam:
# Topics
pointCloudTopic: "velodyne_points" # Point cloud data
imuTopic: "imu/data_open" # IMU data
odomTopic: "odometry/imu" # IMU pre-preintegration odometry, same frequency as IMU
# gpsTopic: "odometry/gpsz" # GPS odometry topic from navsat, see module_navsat.launch file
# gpsTopic: "imu/nav" # imu/nav
# Frames
lidarFrame: "base_link"
baselinkFrame: "base_link"
odometryFrame: "odom"
mapFrame: "map"
# GPS Settings
useImuHeadingInitialization: false # if using GPS data, set to "true"
useGpsElevation: false # if GPS elevation is bad, set to "false"
gpsCovThreshold: 2.0 # m^2, threshold for using GPS data
poseCovThreshold: 25.0 # m^2, threshold for using GPS data
# Export settings
savePCD: false # https://github.com/TixiaoShan/LIO-SAM/issues/3
savePCDDirectory: "/home/zhaopujun/catkin_ws" # in your home folder, starts and ends with "/". Warning: the code deletes "LOAM" folder then recreates it. See "mapOptimization" for implementation
# Sensor Settings
sensor: velodyne # lidar sensor type, 'velodyne' or 'ouster' or 'livox'
N_SCAN: 16 # number of lidar channel (i.e., Velodyne/Ouster: 16, 32, 64, 128, Livox Horizon: 6)
Horizon_SCAN: 1800 # lidar horizontal resolution (Velodyne:1800, Ouster:512,1024,2048, Livox Horizon: 4000)
downsampleRate: 1 # default: 1. Downsample your data if too many points. i.e., 16 = 64 / 4, 16 = 16 / 1
lidarMinRange: 1.0 # default: 1.0, minimum lidar range to be used
lidarMaxRange: 1000.0 # default: 1000.0, maximum lidar range to be used
# IMU Settings
#imuAccNoise: 1.0151327754116719e-02
# imuGyrNoise: 4.9553027388650394e-03
#imuAccBiasN: 7.4655794718659740e-04
#imuGyrBiasN: 6.3727249626266877e-05
#imuGravity: 9.8035
# imuRPYWeight: 0.01
imuAccNoise: 7.5236637366758383e-03
imuGyrNoise: 1.4514722960755217e-04
imuAccBiasN: 1.9784527286040426e-04
imuGyrBiasN: 8.7450530768693497e-07
imuGravity: 9.8035
imuRPYWeight: 0.01
# Extrinsics: T_lb (lidar -> IMU) #############imu-----IMU
extrinsicTrans: [0.0, 0.0, 0.0] #[-0.025, -0.07, -0.245]
extrinsicRot: [0.974229, 0.225117,-0.0141541, ###################################重新弄
-0.225, 0.974313, 0.00939782,
0.0159061, -0.00597096, 0.999856]
################################### lidar imu联合标定后的结果
################################### [0.329847, 0.186982, -0.925332,
################################### -0.242434, -0.930538, -0.274452,
################################### -0.912374, 0.314859, -0.261604]
extrinsicRPY: [0.974229, 0.225117,-0.0141541, ###################################重新弄
-0.225, 0.974313, 0.00939782,
0.0159061, -0.00597096, 0.999856]
# extrinsicRot: [1, 0, 0,
# 0, 1, 0,
# 0, 0, 1]
# extrinsicRPY: [1, 0, 0,
# 0, 1, 0,
# 0, 0, 1]
# LOAM feature threshold
edgeThreshold: 1.0
surfThreshold: 0.1
edgeFeatureMinValidNum: 10
surfFeatureMinValidNum: 100
# voxel filter paprams
odometrySurfLeafSize: 0.2 # default: 0.4 - outdoor, 0.2 - indoor
mappingCornerLeafSize: 0.1 # default: 0.2 - outdoor, 0.1 - indoor
mappingSurfLeafSize: 0.2 # default: 0.4 - outdoor, 0.2 - indoor
# robot motion constraint (in case you are using a 2D robot)
z_tollerance: 1000 # meters
rotation_tollerance: 1000 # radians
# CPU Params
numberOfCores: 4 # number of cores for mapping optimization
mappingProcessInterval: 0.15 # seconds, regulate mapping frequency
# Surrounding map
surroundingkeyframeAddingDistThreshold: 1.0 # meters, regulate keyframe adding threshold
surroundingkeyframeAddingAngleThreshold: 0.2 # radians, regulate keyframe adding threshold
surroundingKeyframeDensity: 2.0 # meters, downsample surrounding keyframe poses
surroundingKeyframeSearchRadius: 50.0 # meters, within n meters scan-to-map optimization (when loop closure disabled)
# Loop closure
loopClosureEnableFlag: true
loopClosureFrequency: 1.0 # Hz, regulate loop closure constraint add frequency
surroundingKeyframeSize: 50 # submap size (when loop closure enabled)
historyKeyframeSearchRadius: 15.0 # meters, key frame that is within n meters from current pose will be considerd for loop closure
historyKeyframeSearchTimeDiff: 30.0 # seconds, key frame that is n seconds older will be considered for loop closure
historyKeyframeSearchNum: 25 # number of hostory key frames will be fused into a submap for loop closure
historyKeyframeFitnessScore: 0.3 # icp threshold, the smaller the better alignment
# Visualization
globalMapVisualizationSearchRadius: 1000.0 # meters, global map visualization radius
globalMapVisualizationPoseDensity: 10.0 # meters, global map visualization keyframe density
globalMapVisualizationLeafSize: 1.0 # meters, global map visualization cloud density
# Navsat (convert GPS coordinates to Cartesian)
navsat:
frequency: 50
wait_for_datum: false
delay: 0.0
magnetic_declination_radians: 0
yaw_offset: 0
zero_altitude: true
broadcast_utm_transform: false
broadcast_utm_transform_as_parent_frame: false
publish_filtered_gps: false
# EKF for Navsat
ekf_gps:
publish_tf: false
map_frame: map
odom_frame: odom
base_link_frame: base_link
world_frame: odom
frequency: 50
two_d_mode: false
sensor_timeout: 0.01
# -------------------------------------
# External IMU:
# -------------------------------------
imu0: imu_correct
# make sure the input is aligned with ROS REP105. "imu_correct" is manually transformed by myself. EKF can also transform the data using tf between your imu and base_link
imu0_config: [false, false, false,
true, true, true,
false, false, false,
false, false, true,
true, true, true]
imu0_differential: false
imu0_queue_size: 50
imu0_remove_gravitational_acceleration: true
# -------------------------------------
# Odometry (From Navsat):
# -------------------------------------
odom0: odometry/gps
odom0_config: [true, true, true,
false, false, false,
false, false, false,
false, false, false,
false, false, false]
odom0_differential: false
odom0_queue_size: 10
# x y z r p y x_dot y_dot z_dot r_dot p_dot y_dot x_ddot y_ddot z_ddot
process_noise_covariance: [ 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 10.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0.1, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0.25, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0.25, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0.04, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.015]用rs_lidar雷达跑lio_sam_好人cc的博客-CSDN博客
4.启动4个launch文件
imu节点
roslaunch openzen_sensor openzen_lpms_ig1.launch
LIDAR节点
roslaunch rslidar_sdk start.launch
LIDAR数据转换节点
roslaunch rs_to_velodyne rs2v.launch
LIO_SAM节点
roslaunch lio_sam run.launch
5.最终建图效果
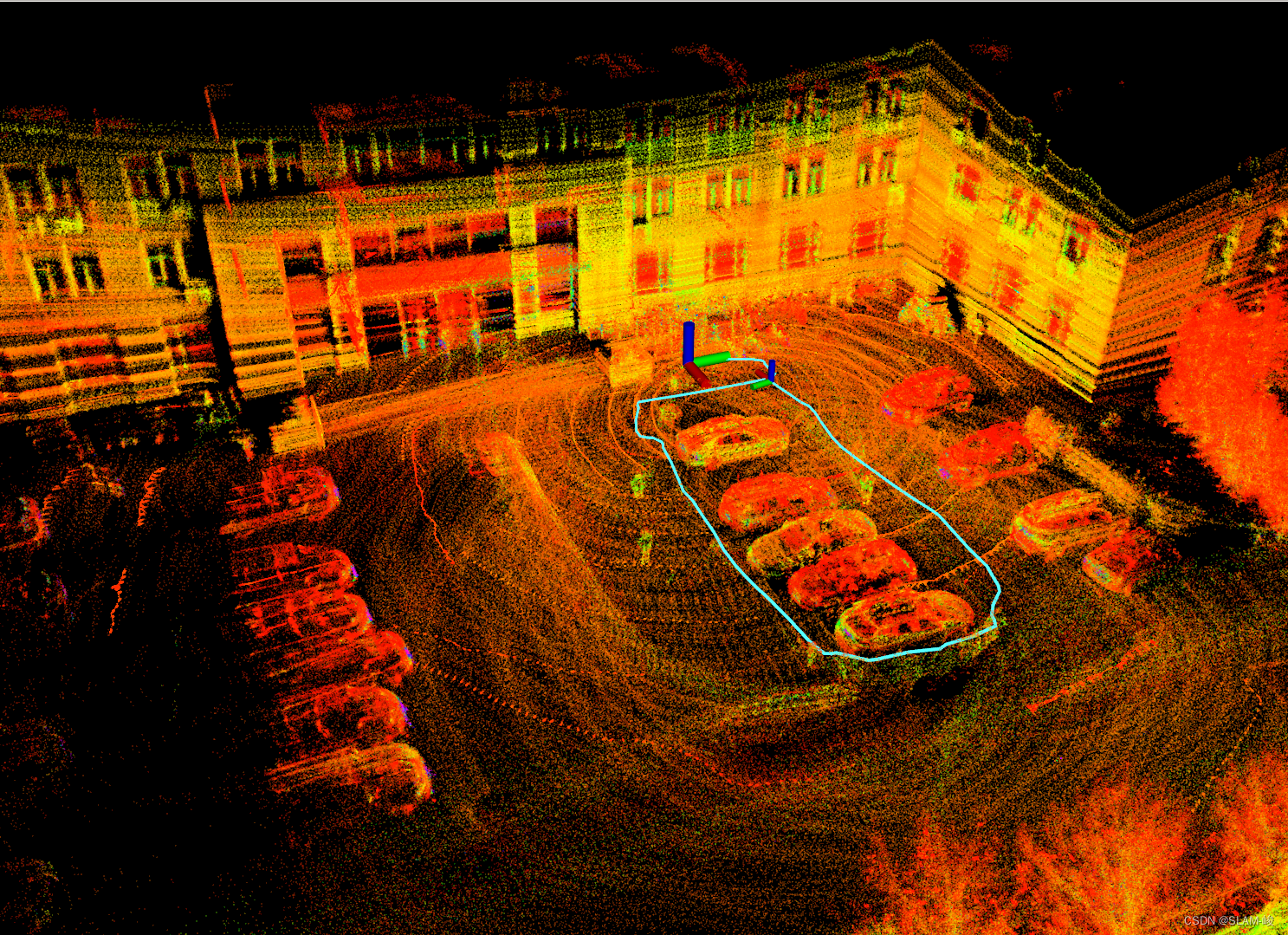
最终建图还是会产生漂移
6.推测漂移的原因:
1.imu标定误差较大
2.GPS未使用,无法校正累计漂移
3.特征点较少的场景会出现退化导致漂移
相关报错:
一.imu_tk标定时出现的错误(一大堆错误,类似语法问题)
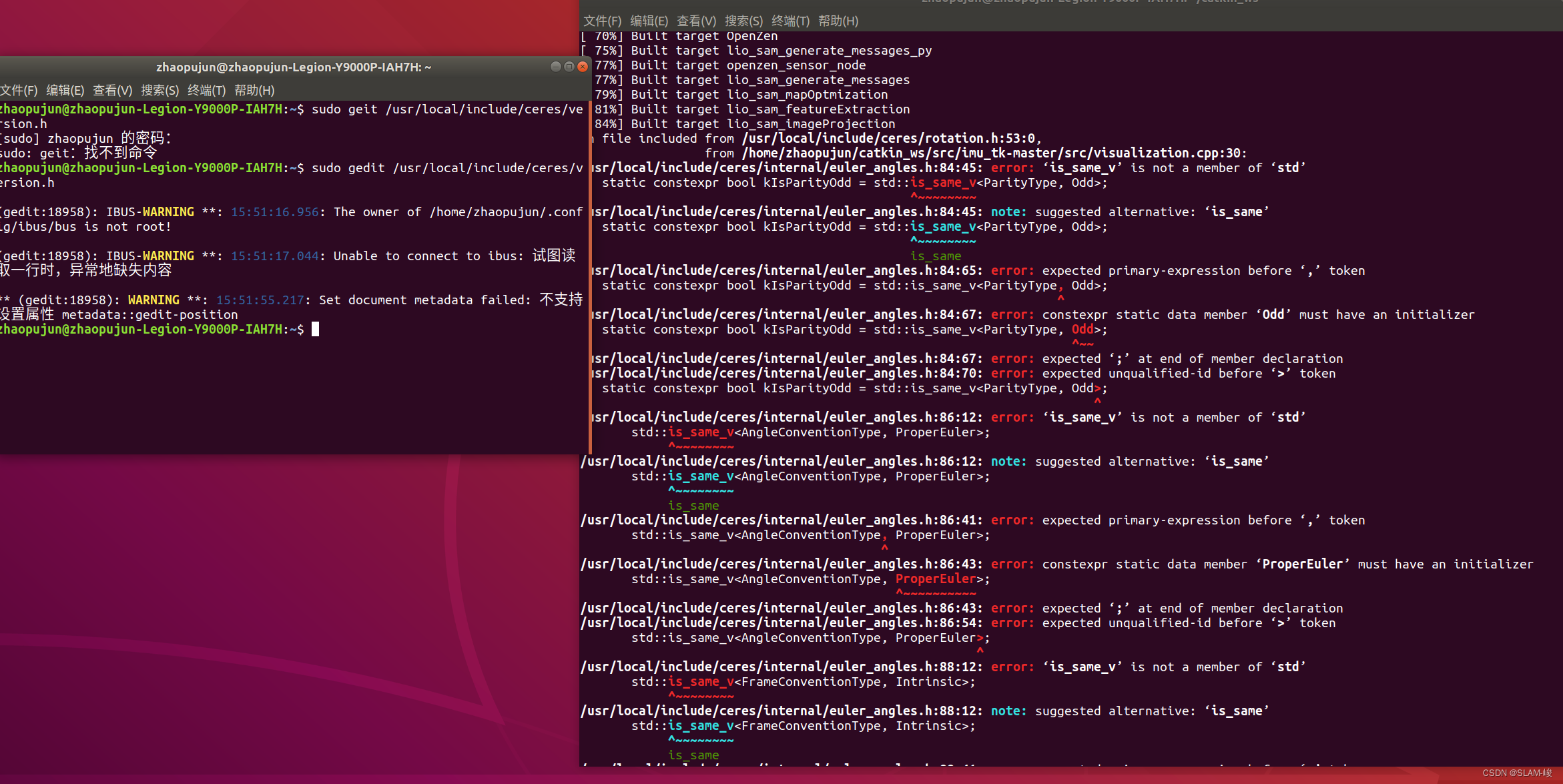
原因:ceres_slover的版本过高
解决:
1 删除ceres库,头文件和lib中
sudo rm -rf /usr/local/include/ceres
sudo rm -rf /usr/local/lib/libceres.a2 安装较低版本库1.14.0
参考:反复踩坑的ceres安装-----ubuntu18.04_小猫咪朴素的生存智慧的博客-CSDN博客_ceres ubuntu
Ubuntu18.04安装Ceres,图文详解_振华OPPO的博客-CSDN博客_ceres安装
3 安装后还有其他问题 /usr/bin/ld: 找不到 -l.......
参考:
ubuntu Make时,“/usr/bin/ld: 找不到 -lXXX”问题的解决方法_highoooo的博客-CSDN博客_/usr/bin/ld