目录
detector.DetectAndCompute() 检测关键点并计算特征描述向量
前言:
SURF(Speeded Up Robust Features)是一种用于特征检测和图像匹配的算法,其主要特点是在提供良好特征匹配性能的同时,具有高速性和对图像变换的鲁棒性
核心函数:
SURF.Create() 创建SURF检测器
SURF.Create(hessianThreshold, extended, upright)hessianThreshold:Hessian阈值,用于控制关键点检测。通常,较大的值将导致更少但更重要的关键点。extended:如果为true,则使用扩展的SURF描述符。扩展的描述符具有更多信息,但也更大。upright:如果为true,则只检测正立(不旋转)的SURF特征。这在某些情况下可以提高性能。
detector.DetectAndCompute() 检测关键点并计算特征描述向量
DetectAndCompute(Mat image, Mat mask, out KeyPoint[] keypoints, Mat descriptors)DetectAndCompute(Mat image, Mat mask, out KeyPoint[] keypoints, Mat descriptors)用于检测关键点并计算特征描述向量。image:要检测关键点的图像。mask:一个可选的掩膜,可用于限制关键点的检测区域。keypoints:输出参数,存储检测到的关键点。descriptors:输出参数,存储计算的特征描述向量。
Cv2.DrawMatches() 绘制特征匹配
void Cv2.DrawMatches(
Mat img1, KeyPoint[] keypoints1,
Mat img2, KeyPoint[] keypoints2,
DMatch[] matches1to2,
Mat outImg,
Scalar matchColor, Scalar singlePointColor,
MatOfByte mask,
DrawMatchesFlags flags = DrawMatchesFlags.Default );img1和img2: 两幅输入图像,用于绘制特征匹配。keypoints1和keypoints2: 分别是两幅图像的关键点数组。matches1to2: 一个包含特征点匹配关系的数组,通常是使用特征匹配算法(如SIFT,SURF,ORB)得出的。outImg: 存储输出结果的 Mat 对象,通常是一个空白图像,这个方法会在这个图像上绘制特征匹配。matchColor: 用于绘制匹配线的颜色。singlePointColor: 用于绘制单个特征点的颜色。mask: 可选参数,一个指示哪些匹配有效的掩码图像。如果不使用掩码,可以传递null。flags: 一个可选参数,控制绘制特征匹配的方式。可以是DrawMatchesFlags.Default或其他选项。
KeyPoint 类:
- 用于表示检测到的关键点的类,包括位置、尺度、方向等信息。
匹配思路:
1、创建检测器
2、检测关键点并计算特征描述向量
3、创建特征点匹配器并进行匹配
4、绘制两个图像匹配出得关键点
5、显示匹配图像
代码流程:
注释详细,仔细阅读。SURF匹配增加了筛选优秀匹配点的逻辑,SIFT匹配为主要流程的匹配

using OpenCvSharp;
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
using Point = OpenCvSharp.Point;
namespace SURF_and_SIFT特征匹配
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
}
Mat srcImage1;
Mat srcImage2;
private void button1_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = "Image Files(*.jpg;*.png*;*.bmp*)|*.jpg;*.png*;*.bmp";
if (ofd.ShowDialog() != DialogResult.OK)
return;
string imagePath = ofd.FileName;
srcImage1 = Cv2.ImRead(imagePath, ImreadModes.AnyColor);
Cv2.ImShow("src image1", srcImage1);
}
private void button2_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = "Image Files(*.jpg;*.png*;*.bmp*)|*.jpg;*.png*;*.bmp";
if (ofd.ShowDialog() != DialogResult.OK)
return;
string imagePath = ofd.FileName;
srcImage2 = Cv2.ImRead(imagePath, ImreadModes.AnyColor);
Cv2.ImShow("src image2", srcImage2);
}
private void button3_Click(object sender, EventArgs e)
{
// 定义SURF中的hessian阈值特征点检测算子
int minHessian = 400;
// 定义一个特征检测类对象
var MySurf = OpenCvSharp.XFeatures2D.SURF.Create(minHessian, 4, 3, true, true);
Mat descriptors1 = new Mat();
Mat descriptors2 = new Mat();
// 模板类是能够存放任意类型的动态数组,能够增加和压缩数据
// 方法1:计算描述符(特征向量),将Detect和Compute操作分开
//KeyPoint[] keyPoint1 = MySurf.Detect(srcImage1);
//KeyPoint[] keyPoint2 = MySurf.Detect(srcImage2);
//MySurf.Compute(srcImage1, ref keyPoint1, descriptors1);
//MySurf.Compute(srcImage2, ref keyPoint2, descriptors2);
// 方法2:计算描述符(特征向量),将Detect和Compute操作合并
KeyPoint[] keyPoint1, keyPoint2;
MySurf.DetectAndCompute(srcImage1, null, out keyPoint1, descriptors1);
MySurf.DetectAndCompute(srcImage2, null, out keyPoint2, descriptors2);
// 使用BruteForce进行匹配 暴力匹配
// 创建特征点匹配器
BFMatcher matcher = new BFMatcher(NormTypes.L2, crossCheck: false);
// 匹配两幅图中的描述子(descriptors)
DMatch[] matches = matcher.Match(descriptors1, descriptors2);
// 设置比率阈值
double ratio_thresh = 0.2;
List<DMatch> good_matches = new List<DMatch>();
for (int i = 0; i < matches.Length; i++)
{
if (matches[i].Distance < ratio_thresh)
{
good_matches.Add(matches[i]);
}
}
if (good_matches.Count <= 4)
{
// 匹配点不足,无法进行透视变换
MessageBox.Show("合格匹配点数量不足" + good_matches.Count);
}
// 创建一个新的图像以绘制匹配结果
Mat imgMatches = new Mat();
// 绘制匹配关键点
Cv2.DrawMatches(srcImage1, keyPoint1, srcImage2, keyPoint2, good_matches, imgMatches, null, null, null, DrawMatchesFlags.NotDrawSinglePoints);
// -------锚定物体------------
// 创建两个数组来存储匹配成功的特征点,一个用于物体图像(obj),另一个用于场景图像(scene)
Point2d[] obj = new Point2d[good_matches.Count()], scene = new Point2d[good_matches.Count()];
// 遍历匹配成功的特征点
for (int i = 0; i < good_matches.Count(); i++)
{
// 获取查询图像中特征点的坐标,通过good_matches[i].QueryIdx找到对应特征点的索引
obj[i] = keyPoint1[good_matches[i].QueryIdx].Pt.ToPoint();
// 获取模板图像中对应的特征点坐标,通过good_matches[i].TrainIdx找到对应特征点的索引
scene[i] = keyPoint2[good_matches[i].TrainIdx].Pt.ToPoint();
}
if (obj.Length < 4)
{
MessageBox.Show("obj优秀匹配点不足,数量为"+ obj.Length);
}
if (scene.Length < 4)
{
MessageBox.Show("匹配点不足,数量为"+ scene.Length);
return;
}
// 使用Cv2.FindHomography方法计算透视变换矩阵H,它可以将物体图像映射到场景图像上
// HomographyMethods.Ransac表示使用RANSAC算法来估计透视变换矩阵,3表示RANSAC算法的最大迭代次数,null表示不使用掩码
Mat H = Cv2.FindHomography(obj, scene, HomographyMethods.Ransac, 3, null);
// 创建两点,初始值设为最小和最大的浮点数,用于存储最左上角和最右下角的点
Point2f topLeft = new Point2f(float.MaxValue, float.MaxValue);
Point2f bottomRight = new Point2f(float.MinValue, float.MinValue);
// 遍历所有匹配点
foreach (DMatch match in good_matches)
{
// 获取当前匹配对中源图像和目标图像的点坐标
Point2f srcPt = keyPoint1[match.QueryIdx].Pt;
Point2f dstPt = keyPoint2[match.TrainIdx].Pt;
// 寻找最左上角的点
topLeft.X = Math.Min(topLeft.X, srcPt.X);
topLeft.Y = Math.Min(topLeft.Y, srcPt.Y);
// 寻找最右下角的点
bottomRight.X = Math.Max(bottomRight.X, srcPt.X);
bottomRight.Y = Math.Max(bottomRight.Y, srcPt.Y);
}
// 将浮点数坐标转换为整数坐标
Point topLeftPoint = new Point((int)topLeft.X, (int)topLeft.Y);
Point bottomRightPoint = new Point((int)bottomRight.X, (int)bottomRight.Y);
// 绘制一个矩形框,框住匹配的区域
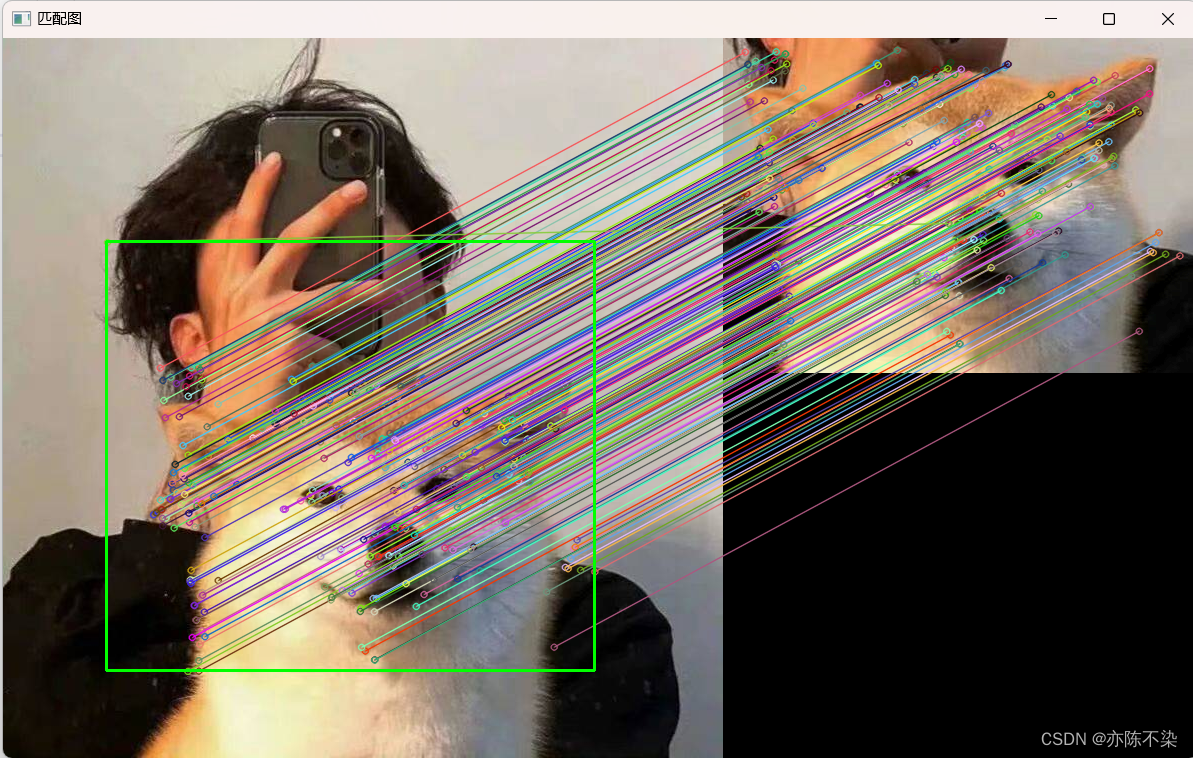
Cv2.Rectangle(imgMatches, topLeftPoint, bottomRightPoint, new Scalar(0, 255, 0), 2);
// 显示最终的匹配图像
Cv2.ImShow("匹配图", imgMatches);
}
// SIFT特征匹配
private void button4_Click(object sender, EventArgs e)
{
// 创建检测器
int minHessian = 400;
var MySift = OpenCvSharp.Features2D.SIFT.Create(minHessian);
Mat descriptors1 = new Mat();
Mat descriptors2 = new Mat();
// 计算描述符(特征向量)
KeyPoint[] keyPoint1, keyPoint2;
MySift.DetectAndCompute(srcImage1, null, out keyPoint1, descriptors1);
MySift.DetectAndCompute(srcImage2, null, out keyPoint2, descriptors2);
// 使用BruteForce进行匹配
// 创建特征点匹配器
BFMatcher matcher = new BFMatcher();
// 匹配两幅图中的描述子(descriptors)
DMatch[] matches = matcher.Match(descriptors1, descriptors2);
//【6】绘制从两个图像中匹配出的关键点
Mat imgMatches = new Mat();
Cv2.DrawMatches(srcImage1, keyPoint1, srcImage2, keyPoint2, matches, imgMatches);//进行绘制
// 显示最终的匹配图像
Cv2.ImShow("SIFT匹配", imgMatches);
}
}
}
运行结果: