这篇文章将解释有关Canny边缘检测,以及不使用预先编写的库编写该算法,以便我们了解Canny边缘检测的原理。
但是,等等...为什么我们需要在图像中检测边缘?
作为人类(我假设你是人类),我们的大脑在任何图像中都可以轻松检测到边缘,但是为了在计算机上自动执行此任务,我们必须使用可以执行该任务的程序。
以下是必须在给定数据中检测边缘的一些实际应用示例:
医学成像
指纹识别
在自动驾驶汽车中
卫星成像
等等……
在检测边缘时,Canny是唯一的选择吗?
不,还有相当多的方法,例如:

Sobel边缘检测
Prewitt边缘检测
Laplacian边缘检测
……
尽管存在不同的方法,但在图像中检测边缘时,Canny边缘检测是一种广泛使用的技术。该算法由John F. Canny于1986年开发,并且自那时以来已成为图像处理中的标准技术。正如我们之前所说,Canny是一个多阶段算法,这意味着它是由许多其他算法组成的算法,我们讨论过的Sobel边缘检测就是Canny中的一个这样的算法。
Canny边缘检测的步骤:
1. 灰度转换
2. 降噪
3. 梯度计算
4. 非最大抑制
5. 双阈值和滞后阈值
1. 灰度转换
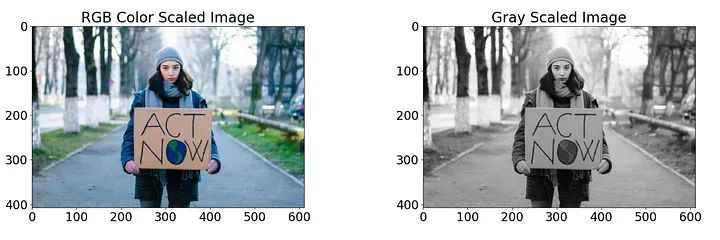
RGB颜色缩放图像(左)和灰度缩放图像(右)
要将HSV、YUV或RGB颜色刻度转换为灰度,我们可能会像这样思考:
“嗯,这很简单,我们只需对每个通道取平均值...”
理论上,该公式是100%正确的,但平均值方法并不按预期工作。
原因是人脑对RGB有不同的反应。眼睛对绿光最敏感,对红光的敏感性较低,对蓝光的敏感性最低。因此,在生成灰度图像时,这三种颜色应该具有不同的权重。
这就引出了另一种方法,称为加权方法,也称为亮度方法。
这种方法相当简单实现:
权重是根据它们的波长计算的,因此改进后的公式将如下所示:
Grayscale = 0.2989 * R + 0.5870 * G + 0.1140 * Bimport numpy as np
def to_gray(img: np.ndarray, format: str):
'''
Algorithm:
>>> 0.2989 * R + 0.5870 * G + 0.1140 * B
- Returns a gray image
'''
r_coef = 0.2989
g_coef = 0.5870
b_coef = 0.1140
if format.lower() == 'bgr':
b, g, r = img[..., 0], img[..., 1], img[..., 2]
return r_coef * r + g_coef * g + b_coef * b
elif format.lower() == 'rgb':
r, g, b = img[..., 0], img[..., 1], img[..., 2]
return r_coef * r + g_coef * g + b_coef * b
else:
raise Exception('Unsupported value in parameter \'format\'')2. 降噪
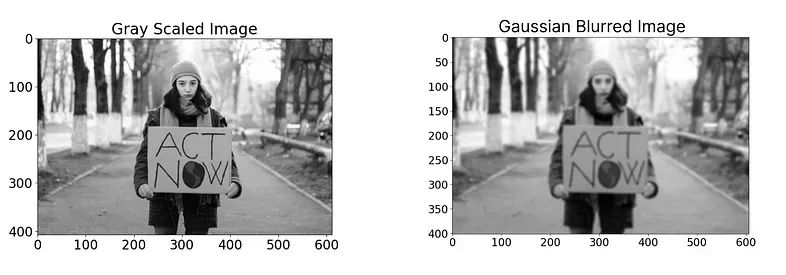
灰度图像(左)和高斯模糊图像(右)
模糊有助于平滑图像并减小像素强度中的小随机变化的影响。有许多用于模糊的卷积核:
高斯滤波器
方框滤波器
均值滤波器
中值滤波器
这里我们将使用高斯滤波器进行模糊处理,该过程是对图像使用高斯核矩阵执行卷积操作,从而得到与给定图像相对应的模糊图像。
3. 梯度计算
因此,灰度转换和模糊处理是预处理阶段。在这一步中,我们将使用Sobel滤波器,因此此步骤实际上是Sobel边缘检测方法。该过程使用Sobel滤波器,它是导数的离散近似,我们将对上述生成的图像(模糊)执行卷积操作,因此,我们将得到两个X和Y梯度,这些梯度是指向图像强度变化最大的方向的向量,使用这两个梯度,我们生成一个单一的总梯度,如果绘制该梯度,我们将得到一个由图像边缘组成的图像,我们还将将X和Y梯度之间的角度(theta)存储在一个变量中以供进一步使用。
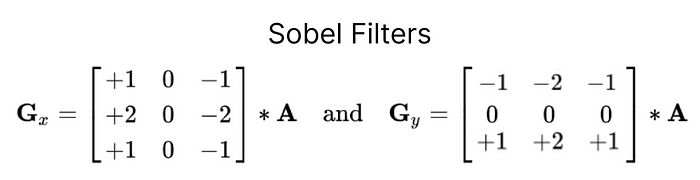
Sobel X和Y滤波
在深入研究之前,我想问一下边缘是什么,我们如何称呼图像的特定部分是边缘?
我们可以说边缘是颜色突变的地方。
如果我们对图像使用Sobel Filter X执行卷积操作,我们将获得另一个矩阵,该矩阵显示x方向上的颜色变化。此外,在图像上卷积Sobel Filter Y会导致另一个矩阵,该矩阵显示y方向上的颜色变化。
但是,这究竟是如何发生的?
非常简单,只需查看下面的插图
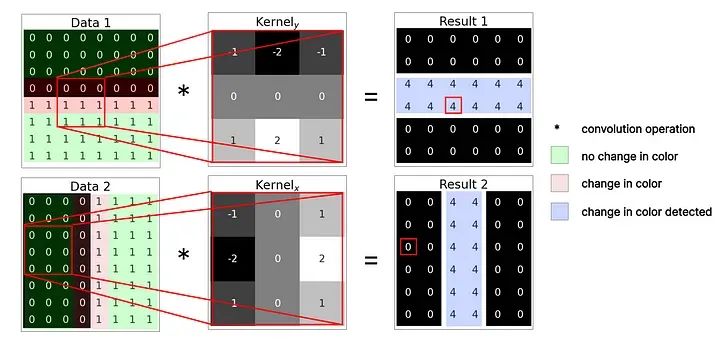
Sobel滤波器生成X和Y梯度的插图
现在,如果我们在真实图像上执行此操作,结果如下所示:
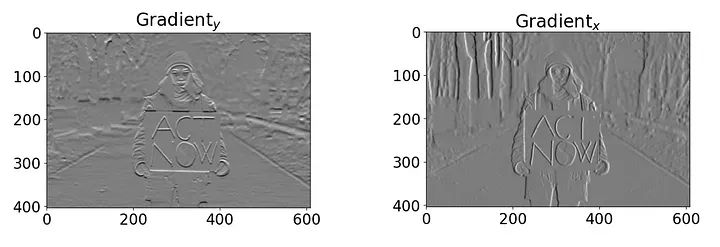
X和Y的变化。
为了找到总变化,我们使用毕达哥拉斯定理。以X梯度为底,Y梯度为高,这样斜边就是总变化。
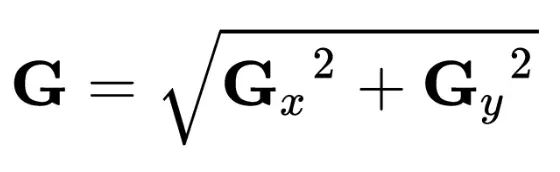
hypotenuse公式
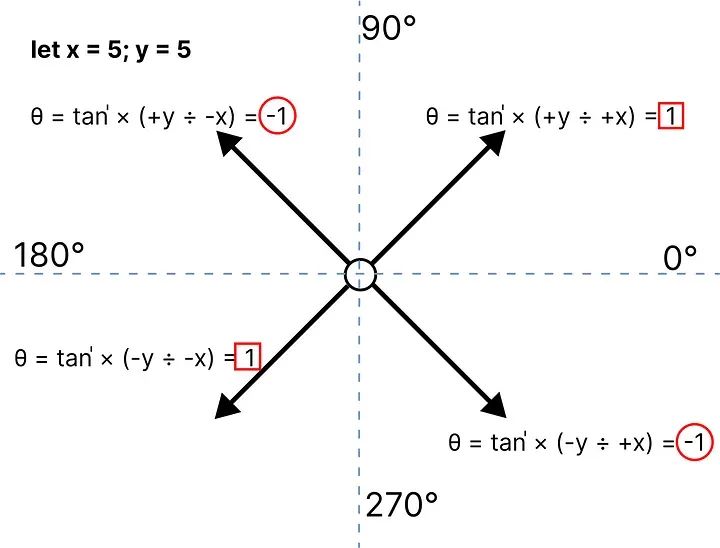
角度可以按照下面的方式计算:

可以使用Python中的NumPy按照以下方式计算:
theta = np.arctan(Gradient_Y / (Gradient_X + np.finfo(float).eps))
# np.finfo(float).eps is added to tackle the division by zero error但是,如果您看下面的插图,可以注意到即使在这样做的情况下正确获取了角度,方向性也可能会丢失。
检测到的角度矩阵的图片表示
因此,您找到的角度不会在整个圆圈的范围内。通过这种方式,如果我们计算theta,结果将如下:
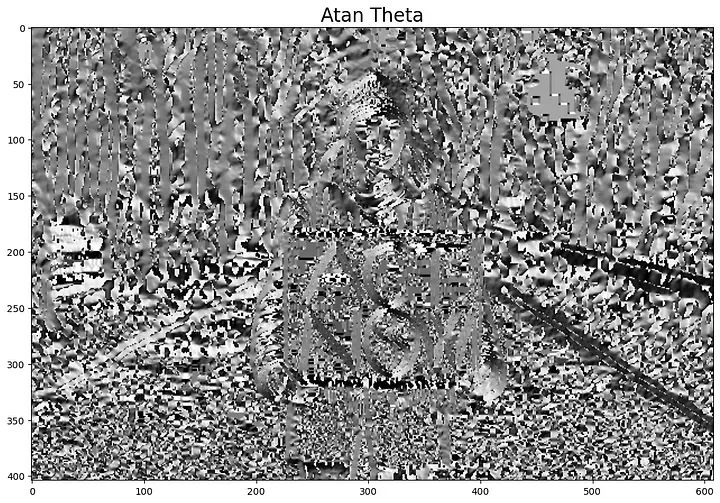
使用atan检测到的角度矩阵的图片表示
而不是:
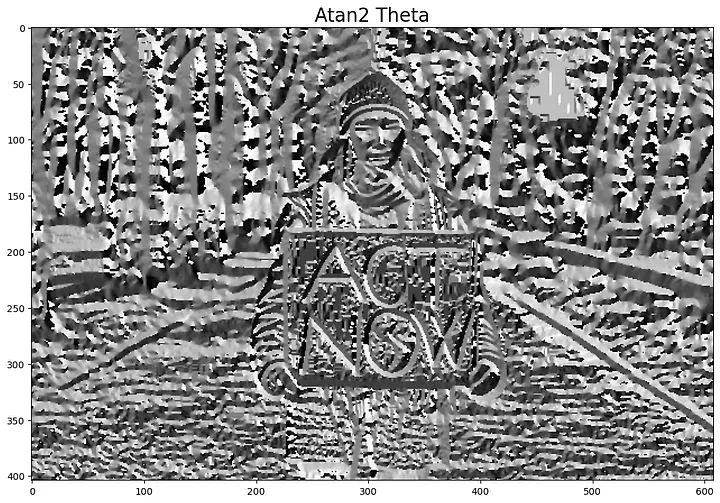
使用atan2检测角度矩阵的图片表示
为了解决这个问题,数学家在计算中添加了一些条件,因此新方法被称为atan2。
根据维基百科,条件如下:
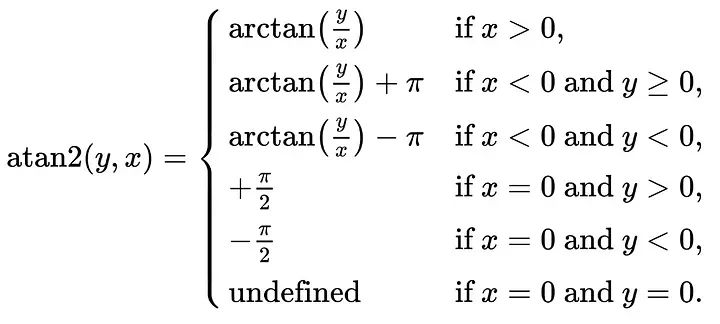
从atan转换为atan2的条件
因此,在atan2中,我们不是给出y和x之间的比率,而是将它们都给出,以便算法可以进行调整。在Python中,使用NumPy,您可以如下使用atan2:
theta = np.arctan2(Gradient_Y, Gradient_X)因此,最终,您了解了所有详细信息,并找到了边缘。以下是计算梯度和theta(theta在接下来的阶段中使用)的代码:
G = np.sqrt((Gradient_X ** 2.0)+(Gradient_Y ** 2.0))
''' or simply do the following '''
G = np.hypot(Gradient_X, Gradient_Y)
G = G / G.max() * 255 # the total gradient; ie, the edge detection result
theta = np.arctan2(Gradient_Y, Gradient_X)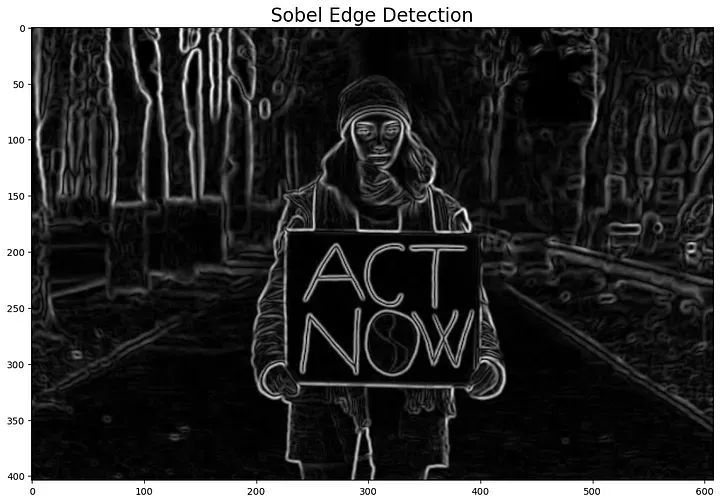
Sobel边缘检测结果
现在我必须问一个问题,我们结束了吗?
实际上我们不能这么说,因为根据您打算对结果做什么,它可能会有所不同。我们目前面临的问题有:
Sobel边缘检测算法还找到了边缘的厚度。
它不是二进制图像,而是灰度图像。
它也有许多噪音,我们可以减少。
为了解决这些问题,我们将使用非极大值算法来抑制厚度,并使用阈值进行进一步改进。
4. 非极大值抑制
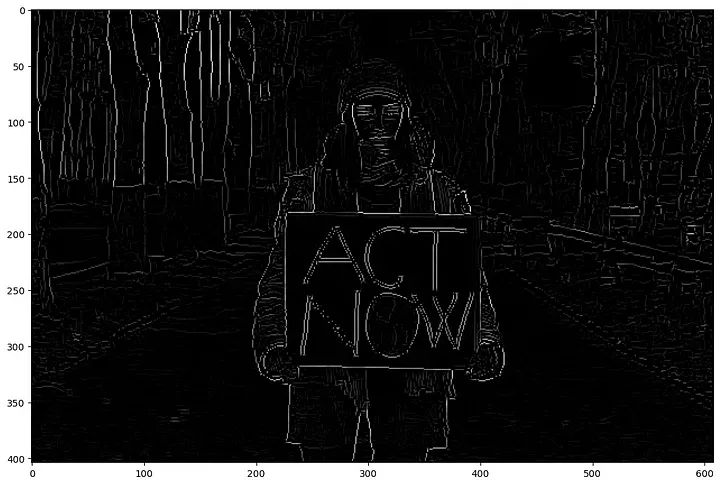
非极大值抑制结果
在这个阶段,我们将利用theta。该过程是,我们遍历所有像素,并取当前像素的两个相邻像素并将其与它们比较,以找出当前像素的强度是否大于两个相邻像素,如果是,则继续,否则将当前像素强度设置为0。
在这里,我们必须专注于采用相邻像素,我们不能只是在当前像素周围采用一些随机像素,而必须根据角度theta进行。这个想法是取与主像素的角度几乎垂直方向的像素。例如,如果theta在22.5°和67.5°之间,则采用如下所示的像素,其中(i,j)是当前像素。
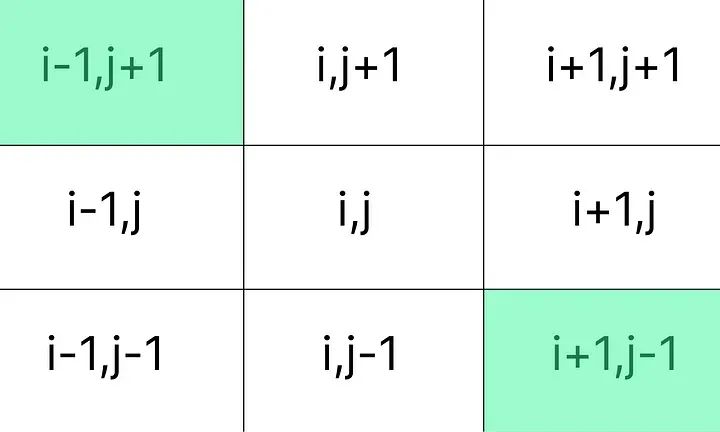
用作(i, j)像素邻接像素的插图
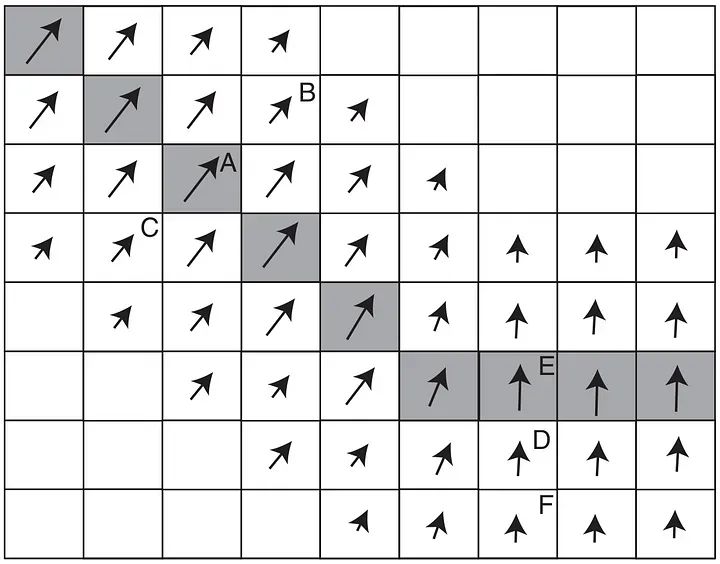
以下是该过程的另一个说明,箭头表示角度,我们的目标是仅检测阴影像素。
以下是非极大值抑制的代码。
'''Non Max Suppression'''
M, N = G.shape
Z = np.zeros((M,N), dtype=np.int32) # resultant image
angle = theta * 180. / np.pi # max -> 180, min -> -180
angle[angle < 0] += 180 # max -> 180, min -> 0
for i in range(1,M-1):
for j in range(1,N-1):
q = 255
r = 255
if (0 <= angle[i,j] < 22.5) or (157.5 <= angle[i,j] <= 180):
r = G[i, j-1]
q = G[i, j+1]
elif (22.5 <= angle[i,j] < 67.5):
r = G[i-1, j+1]
q = G[i+1, j-1]
elif (67.5 <= angle[i,j] < 112.5):
r = G[i-1, j]
q = G[i+1, j]
elif (112.5 <= angle[i,j] < 157.5):
r = G[i+1, j+1]
q = G[i-1, j-1]
if (G[i,j] >= q) and (G[i,j] >= r):
Z[i,j] = G[i,j]
else:
Z[i,j] = 0仍然只是减小了边缘的宽度,我们必须使边框颜色一致并消除一些噪声。
5. 双阈值和滞后阈值
双阈值用于识别图像中的强边缘和弱边缘。梯度幅度高于高阈值的像素被视为强边缘,因此我们为其分配像素值255。梯度幅度低于低阈值的像素被视为非边缘,因此它们被分配像素值0。
梯度幅度在低和高阈值之间的像素被视为弱边缘。仅当它们连接到强边缘时,这些像素才被分配像素值255,否则将其分配为0,这个过程被称为滞后阈值。以下是计算双阈值处理过程的代码:
def double_threshold(image, low_threshold_ratio=0.05, high_threshold_ratio=0.09):
high_threshold = image.max() * high_threshold_ratio
low_threshold = high_threshold * low_threshold_ratio
M, N = image.shape
result = np.zeros((M, N), dtype=np.int32)
strong_i, strong_j = np.where(image >= high_threshold)
zeros_i, zeros_j = np.where(image < low_threshold)
weak_i, weak_j = np.where((image <= high_threshold) & (image >= low_threshold))
result[strong_i, strong_j] = 255
result[zeros_i, zeros_j] = 0
result[weak_i, weak_j] = 50 # 用于滞后阈值
return result
双阈值结果
以下是滞后阈值处理过程的代码:
def hysteresis(image, weak=50):
M, N = image.shape
result = np.zeros((M, N), dtype=np.int32)
strong_i, strong_j = np.where(image == 255)
weak_i, weak_j = np.where(image == weak)
for i, j in zip(strong_i, strong_j):
result[i, j] = 255
for i, j in zip(weak_i, weak_j):
if any(image[x, y] == 255 for x in range(i-1, i+2) for y in range(j-1, j+2)):
result[i, j] = 255
else:
result[i, j] = 0
return result结论
希望现在您对Canny边缘检测算法有了清晰的理解。从头开始编写代码并不是一种不好的做法,它实际上比仅仅解释更好地帮助您理解事物。但是,当您在实际项目中工作时,您不必从头开始编写代码,然后您可以使用诸如OpenCV之类的库来帮助您。在Python中使用OpenCV,您可以生成如下的高斯模糊图像:
import cv2
img = cv2.imread(<img_path>)
# to grayscale
imgGray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# guassian blur
imgBlur = cv2.GaussianBlur(imgGray, (13, 13), 0)
# canny edge detection
imgCanny = cv2.Canny(imgBlur, 50, 50)· END ·
HAPPY LIFE

本文仅供学习交流使用,如有侵权请联系作者删除