学习率调度器
到目前为止,我们主要关注如何更新权重向量的优化算法,而不是它们的更新速率。 然而,调整学习率通常与实际算法同样重要,有如下几方面需要考虑:
-
首先,学习率的大小很重要。如果它太大,优化就会发散;如果它太小,训练就会需要过长时间,或者我们最终只能得到次优的结果。我们之前看到问题的条件数很重要。直观地说,这是最不敏感与最敏感方向的变化量的比率。
-
其次,衰减速率同样很重要。如果学习率持续过高,我们可能最终会在最小值附近弹跳,从而无法达到最优解。
-
另一个同样重要的方面是初始化。这既涉及参数最初的设置方式,又关系到它们最初的演变方式。这被戏称为预热(warmup),即我们最初开始向着解决方案迈进的速度有多快。一开始的大步可能没有好处,特别是因为最初的参数集是随机的。最初的更新方向可能也是毫无意义的。
-
最后,还有许多优化变体可以执行周期性学习率调整。这超出了本章的范围,我们建议读者阅读 (Izmailov et al, 2018)来了解个中细节。例如,如何通过对整个路径参数求平均值来获得更好的解。
鉴于管理学习率需要很多细节,因此大多数深度学习框架都有自动应对这个问题的工具。 在本章中,我们将梳理不同的调度策略对准确性的影响,并展示如何通过学习率调度器(learning rate scheduler)来有效管理。
们从一个简单的问题开始,这个问题可以轻松计算,但足以说明要义。 为此,我们选择了一个稍微现代化的LeNet版本(激活函数使用relu而不是sigmoid,汇聚层使用最大汇聚层而不是平均汇聚层),并应用于Fashion-MNIST数据集。 此外,我们混合网络以提高性能。 由于大多数代码都是标准的,我们只介绍基础知识,而不做进一步的详细讨论
%matplotlib inline
import math
import torch
from torch import nn
from torch.optim import lr_scheduler
from d2l import torch as d2l
def net_fn():
model = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
nn.Flatten(),
nn.Linear(16 * 5 * 5, 120), nn.ReLU(),
nn.Linear(120, 84), nn.ReLU(),
nn.Linear(84, 10))
return model
loss = nn.CrossEntropyLoss()
device = d2l.try_gpu()
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size=batch_size)
# 代码几乎与d2l.train_ch6定义在卷积神经网络一章LeNet一节中的相同
def train(net, train_iter, test_iter, num_epochs, loss, trainer, device,
scheduler=None):
net.to(device)
animator = d2l.Animator(xlabel='epoch', xlim=[0, num_epochs],
legend=['train loss', 'train acc', 'test acc'])
for epoch in range(num_epochs):
metric = d2l.Accumulator(3) # train_loss,train_acc,num_examples
for i, (X, y) in enumerate(train_iter):
net.train()
trainer.zero_grad()
X, y = X.to(device), y.to(device)
y_hat = net(X)
l = loss(y_hat, y)
l.backward()
trainer.step()
with torch.no_grad():
metric.add(l * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0])
train_loss = metric[0] / metric[2]
train_acc = metric[1] / metric[2]
if (i + 1) % 50 == 0:
animator.add(epoch + i / len(train_iter),
(train_loss, train_acc, None))
test_acc = d2l.evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch+1, (None, None, test_acc))
if scheduler:
if scheduler.__module__ == lr_scheduler.__name__:
# UsingPyTorchIn-Builtscheduler
scheduler.step()
else:
# Usingcustomdefinedscheduler
for param_group in trainer.param_groups:
param_group['lr'] = scheduler(epoch)
print(f'train loss {train_loss:.3f}, train acc {train_acc:.3f}, '
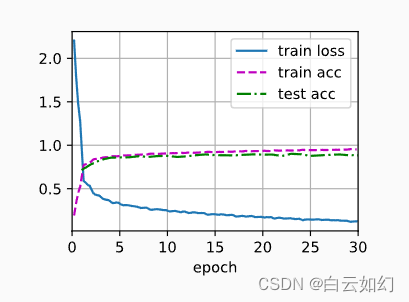
f'test acc {test_acc:.3f}')让我们来看看如果使用默认设置,调用此算法会发生什么。 例如设学习率为0.3并训练30次迭代。 留意在超过了某点、测试准确度方面的进展停滞时,训练准确度将如何继续提高。 两条曲线之间的间隙表示过拟合。
lr, num_epochs = 0.3, 30
net = net_fn()
trainer = torch.optim.SGD(net.parameters(), lr=lr)
train(net, train_iter, test_iter, num_epochs, loss, trainer, device)train loss 0.128, train acc 0.951, test acc 0.885