一.算法原理
值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板,该模板包括了其周围的临近像素(以目标像素为中心的周围8个像素,构成一个滤波模板,即去掉目标像素本身),再用模板中的全体像素的平均值来代替原来像素值。
二.源代码
#include <opencv2\highgui\highgui.hpp>#include <opencv2\core\core.hpp>
#include <opencv2\imgproc\imgproc.hpp>
#include <opencv2/opencv.hpp>
#include<ctime>
using namespace cv;
using namespace std;
//均值滤波
void AverFiltering(const Mat &src, Mat &dst) {
if (!src.data) return;
//at访问像素点
for (int i = 1; i<src.rows; ++i)
for (int j = 1; j < src.cols; ++j) {
if ((i - 1 >= 0) && (j - 1) >= 0 && (i + 1)<src.rows && (j + 1)<src.cols)
{//边缘不进行处理
dst.at<Vec3b>(i, j)[0] = (src.at<Vec3b>(i, j)[0] + src.at<Vec3b>(i - 1, j - 1)[0] + src.at<Vec3b>(i - 1, j)[0] + src.at<Vec3b>(i, j - 1)[0] +
src.at<Vec3b>(i - 1, j + 1)[0] + src.at<Vec3b>(i + 1, j - 1)[0] + src.at<Vec3b>(i + 1, j + 1)[0] + src.at<Vec3b>(i, j + 1)[0] +
src.at<Vec3b>(i + 1, j)[0]) / 9;
dst.at<Vec3b>(i, j)[1] = (src.at<Vec3b>(i, j)[1] + src.at<Vec3b>(i - 1, j - 1)[1] + src.at<Vec3b>(i - 1, j)[1] + src.at<Vec3b>(i, j - 1)[1] +
src.at<Vec3b>(i - 1, j + 1)[1] + src.at<Vec3b>(i + 1, j - 1)[1] + src.at<Vec3b>(i + 1, j + 1)[1] + src.at<Vec3b>(i, j + 1)[1] +
src.at<Vec3b>(i + 1, j)[1]) / 9;
dst.at<Vec3b>(i, j)[2] = (src.at<Vec3b>(i, j)[2] + src.at<Vec3b>(i - 1, j - 1)[2] + src.at<Vec3b>(i - 1, j)[2] + src.at<Vec3b>(i, j - 1)[2] +
src.at<Vec3b>(i - 1, j + 1)[2] + src.at<Vec3b>(i + 1, j - 1)[2] + src.at<Vec3b>(i + 1, j + 1)[2] + src.at<Vec3b>(i, j + 1)[2] +
src.at<Vec3b>(i + 1, j)[2]) / 9;
}
else {//边缘赋值
dst.at<Vec3b>(i, j)[0] = src.at<Vec3b>(i, j)[0];
dst.at<Vec3b>(i, j)[1] = src.at<Vec3b>(i, j)[1];
dst.at<Vec3b>(i, j)[2] = src.at<Vec3b>(i, j)[2];
}
}
}
//图像椒盐化
void salt(Mat &image, int num) {
if (!image.data) return;//防止传入空图
int i, j;
srand(time(NULL));
for (int x = 0; x < num; ++x) {
i = rand() % image.rows;
j = rand() % image.cols;
image.at<Vec3b>(i, j)[0] = 255;
image.at<Vec3b>(i, j)[1] = 255;
image.at<Vec3b>(i, j)[2] = 255;
}
}
void main() {
Mat image = imread("fzh.jpg");
Mat Salt_Image;
image.copyTo(Salt_Image);
salt(Salt_Image, 3000);
Mat image1(image.size(), image.type());
Mat image2;
AverFiltering(Salt_Image, image1);
blur(Salt_Image, image2, Size(3, 3));//openCV库自带的均值滤波函数
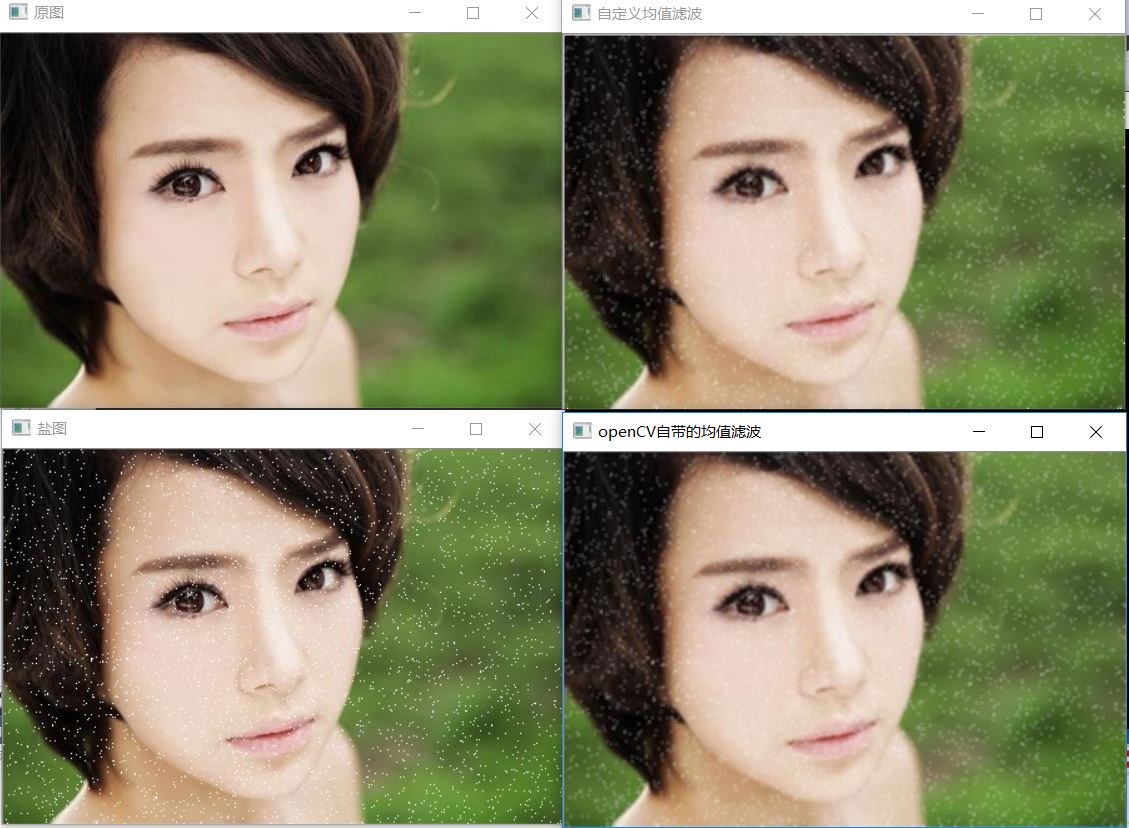
imshow("原图", image);
imshow("盐图", Salt_Image);
imshow("自定义均值滤波", image1);
imshow("openCV自带的均值滤波", image2);
waitKey();
}
1>双层for循环里的if判断是为了不处理边缘的图像的噪点
2>dst.at<Vec3b>(i, j)[0] 这种表达 dst是个mat型变量,vec3b意思代表向量,然后是坐标点和第0通道,因为是彩色图像所以是RGB三个通道
三.程序运行效果