随着秋招走向尾声,这边总结一下当时记录的部分企业的面试过程吧。
我学习期间的研究方向是深度强化学习,所以项目经历都与强化学习相关,面试官问项目时也会往这方向考察。
鉴智机器人
面试岗位:决策规划岗位
笔试
笔试出的是力扣原题。2道中等难度+1道困难题。
一面
- DDPG,TD3算法流程,区别
- 路径规划算法了解的讲一下
- 强化学习落地难,你的看法
- 控制就业方向窄,建议转决策
二面
- A星算法介绍以及实际应用的优缺点,如何解决。在搜索的时候有什么技巧?
- SAC的梯度传递方式
- 参数正则化trick
- 强化学习落地难的看法
- 模仿学习了解
- 控制障碍函数的使用与势场法有什么区别
- 混合A星
- Lattice规划
总结
当时鉴智机器人是最早面试的几个公司之一,所以体验并非很好,不出意外在二面阶段就挂了。
暴露出的问题:对基础掌握不扎实,底层不够了解,优缺点也不够了解。
亿嘉和
岗位:机器人规划控制岗位
一面
- MPC和LQR比较
- 优化算法
- C++容器
- ROS基础
- ROS话题并行串行
- Node间的通信有哪几种
- 感知定位
- 了解什么自动驾驶开源方案
- 强化学习落地很难,目前只有在四足机器人上的效果比得上传统控制,那你觉得强化学习有什么优势?
总结
亿嘉和的面试非常简单,无笔试环节,仅一面就hr面了。面试官问的重点偏向编写语言知识方面,没有询问项目。
科大讯飞
岗位:自然语言处理——智能语音方向
笔试
科大讯飞的笔试还是不简单的,选择题+3道编程题。
编程题出了一道实现K-means算法的题。

一面
- 问项目
- 问强化学习知识点
- 各种常用的强化学习算法的原理
- 机器学习过拟合、欠拟合知识点
二面
- 主要问项目
总结
科大讯飞原本报的岗位是决策规划岗位,后来被转到了智能语言方向进行面试。科大讯飞的面试相对来说还是非常简单的,单纯的询问项目和一些知识点问答。不过二面时面试官问我期望薪资多少,我当时并不知道他们能开的是多少,所以随意说了一个较高的数字,然后就没下文了。。
地平线
一面
2022.8.19
-
问项目
-
做一道数学题:给一个多项式式子,化成二次型表示
f ( x 1 , x 2 , x 3 ) = ( x 1 − 1 ) 2 + ( x 2 − 2 ) 2 + ( x 3 − 3 ) 2 + ( x 1 − x 2 ) 2 + ( x 2 − x 3 ) 2 x 1 , x 2 , x 3 ∈ R f\left(x_1, x_2, x_3\right)=\left(x_1-1\right)^2+\left(x_2-2\right)^2+\left(x_3-3\right)^2+\left(x_1-x_2\right)^2+\left(x_2-x_3\right)^2\\ x_1, x_2, x_3 \in \mathbf{R} f(x1,x2,x3)=(x1−1)2+(x2−2)2+(x3−3)2+(x1−x2)2+(x2−x3)2x1,x2,x3∈R- 将该函数写成矩阵和向量的二次型形式。
- 该函数取最小值的充分必要条件是?
-
coding环节:已知一条线段两端点坐标A,B以及一点C,求点C到线段AB的投影点坐标。
-
意向地
-
职业规划
二面
2022.8.26
总结
地平线是比较可惜的,二面一开始先做题目,由于我当时没写出来,所以面试官直接通知很遗憾了。。
蔚来
岗位:自动驾驶规划控制岗位
笔试
笔试比较简单,选择题+3道编程题,编程题是力扣题目。
一面
问答
- 介绍自己。
- 介绍强化学习怎么用的。
- 强化学习用作参数拟合做过吗?
- 说一些自动驾驶的强化学习的应用
- 强化学习与经典方法的优劣
- PID算法阐述
- 积分饱和现象怎么解决
- LQR原理
- PID与LQR的区别
- MPC原理
- MPC与LQR区别
- QP的原理
- 模型的参数辨识有了解过吗
- 汽车动力学模型知识点–车轮的侧偏力
- MPC或LQR在动力学模型上应用有熟悉吗?
- 无人机项目相关
- 强化学习与经典方法哪种方式比较好
- 目前为什么使用MPC在汽车上的比较少?
- 最优控制与强化学习的联系与区别
手撕代码题
- C++实现PID类,需要包含积分饱和的处理。
二面
主要问我的项目。
- 无人车项目经历
- 修正的过程?
- 二次规划目标函数?
- 与传统控制方法的对比有吗?
- 结果对比
- 飞机失控研究项目
- 效果怎么样
- 输入输出?
- 神经网络输入输出
- Q函数是拟合出来的吗
- MBRL
- MPC怎么使用的
- 为什么要使用RL?这样建模很多是无法保证的
- 做飞行器和汽车而言,主要差别在哪里?如果要进入这个行业,要从哪几个方面补课呢?
- 每年新兴的算法都很多,工业界用的算法都很保守,你觉得原因是什么?
- 自动驾驶决策难点在哪里?
- 无人机决策难点在哪里?控制频率和通信频率
总结
蔚来也是面的较早的一批,大概8月份左右,当时做的准备不够充足,二面半小时就结束了。非常可惜。。。
文远
岗位:自动驾驶决策规划岗位
一面
2022.9.13
项目
- 安全强化学习运动规划
- 使用普通规划方法与CBF结合不行吗
- 如果在无干扰和延时的情况下是可以的,但是面对工况比较复杂时,RL的优势就体现出来了。
- 使用普通规划方法与CBF结合不行吗
- 融合物理对称性的MBRL
- 对称性含义
coding
- 求平方根
- 牛顿法的复杂度
- 求矩阵的最长递增路径长度
- dfs
- dp搜索方向
总结
文远的一面手撕代码只写出来一道,第二道题没写出来,所以没了。。所以题还是得多练,一般手撕题都是力扣原题或者类似的题。
滴滴
岗位:自动驾驶决策规划岗位
提前批无笔试。
滴滴提前批一面(40分钟)
20220826
-
自我介绍
-
项目:飞机失控和安全强化学习
- reward怎么设计的
- 稳定性哟普理论证明嘛
- 对比传统方法优点
-
项目:安全强化学习
- 怎么保证安全的
- CBF硬约束还是软约束?
- CBF如何加入到RL训练中的
- 怎么通过二次规划
- 约束怎么给,怎么保证是凸约束
- 求解失败怎么办,如何提高算法求解成功率
- 怎么调整安全阈值的
-
手撕代码:找到 K 个最接近的元素
滴滴提前批二面(40分钟)
20220826
- 面试官介绍
- 行为规划
- 逻辑回归
- rule-based 使用率:70-80%
- 优化 使用率:10-20%
- 数据驱动:10-20%
- 控制、规划、交互决策
- 项目:安全强化学习
- 控制障碍函数形式
- 如何结合
- 控制障碍函数的输入
- 二次规划目标函数和约束是什么
- collision cone
- vector
- vector底层
- push_back实现原理
- 原生数组有什么缺点
- size()和capacity()区别
- public,protected,private
- 手撕:实现push_back函数
滴滴提前批三面(50分钟)
20220901
- 问项目(30多分钟)
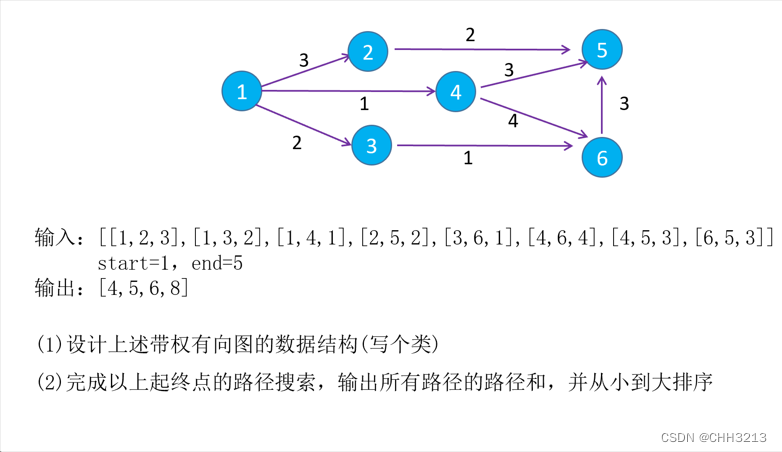
- 做题:给了一道寻找起点到终点的所有路径的编程题
滴滴提前批四面(30分钟)
20220909
- 单纯问项目
总结
滴滴大概是我最遗憾的,一路走到了四面,应该是sp了,前面三面面试都挺顺利,可惜最后一面答得不是很好,然后就泡池子无下文了。
以上是当时有记录的一些企业,另外还有面的其它企业当时忘记记录了,现在也已经想不起来当时面试内容是什么。这次秋招总体来看对于我而言是失败的秋招,想去的企业都没有通过,最后接了点击就送的BYD,目前来看算是躺平了,相比其他人来说薪资水平已经远远不在一个起跑线上,只希望自己在入职之后能够生活得很好吧。
最后,附上我当时投递的公司列表: