文献分析
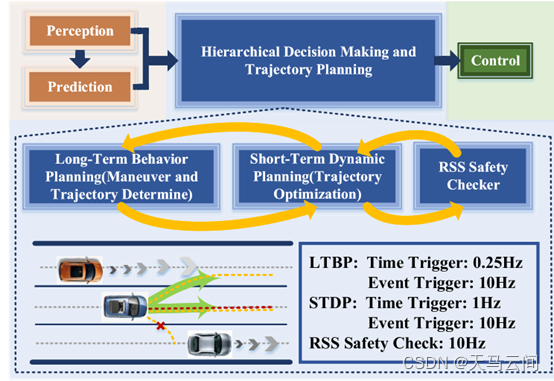
这篇《整体决策的统一框架和基于时空的高速路自动驾驶轨迹规划》论文,针对过往前任研究的一些不足,建立了决策规划的三个模块,这三个模块针对短期(10hz,一秒运行十次),中期(1hz,一秒运行一次),长期(0.25hz,4秒运行一次)的不同时间段的目标,构建了不同的算法,分别是长周期的行为规划,短期的动力学规划,和一个安全性检查;
决策规划是自动驾驶的核心技术,决策感知的主要任务就是要基于感知系统感知到的车辆周边状态,找到一条安全的,乘客乘坐体验舒适的,丝滑的的路径,交给控制模块执行。以前的研究呢,往往把决策和规划模块分开来写,这就不太好,因为决策和规划模块联系紧密,,相互影响,甚至,分开写会导致规划模块完不成决策模块的目标,要么过渡保守,要么过度激进。
一般来讲,做决策规划一般都是两个思路,一个是基于规则的专家系统,另一个是基于神经网络的各种学习,但是各个不同类型的都只兼顾到一个重点,有几个问题处理的不太好
(1) 怎么应对高速路上很多运动的障碍物,来找到一条安全的,无碰撞的路径
(2) 如何高效的平衡长期规划和短期规划,它的意思就是,一个车长期规划可能是十秒内走三百米(108公里每小时),还得超车,但是走了50米要超的车肯可能减速了,短期还得避让他,这种问题怎么处理
(3) 如何让决策和规划模块更紧密的配合,来更好地完成规划任务
这篇文章针对上述的三个问题,构建了一个多层次的短期长期决策规划一起考虑的并且带一个安全检查的统一框架,分别提出了三个解决思路
(1) 高速路上不是动态障碍多吗,本文提出了,一种不但要考虑二维平面,还得考虑三维空间,因为实际空间里的障碍物,比如高速上的各种车,就是三维立体的,而不是二维平民的
(2) 针对短期规划和长期规划难以平衡的问题,本文提出的框架,就用长期规划来决定长期一点的行为决策,比如决定超车;短期规划用来优化超车的轨迹和进行目标跟踪
(3) 一个紧密的闭环系统,里面涉及了时间触发和事件触发,来解决问题三
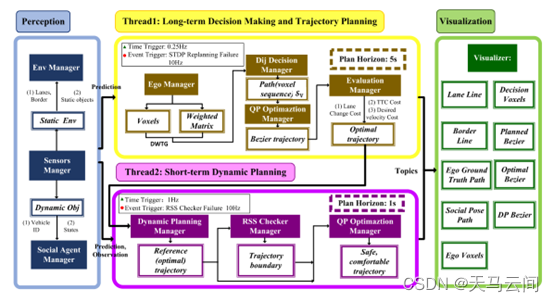
对长期规划来说(LTBP),他由四个组成部分;管理器,迪杰斯特拉器,QP轨迹优化器,更新器
对短期规划来说,主要用来跟踪优化动态轨迹(基于周边的车辆状态),主要包括:动态规划器,安全检查器,和轨迹优化器
这篇论文构建的体系在在自动驾驶系统中的架构,可以看到两个线程分别运行短期规划和长期规划。每个规划里又有不同的模块,并且论文提到了两个触发,一个是时间的周期性触发,另一个是事件触发。
论文从不同的方面验证了提出的框架,通过这种框架能确定无障碍物的通行空间,并且正在公共数据集上用实验证明了这个方法的有效性和效率,并且通过对比实验,验证了这种框架的优越性。