本节解析VINS后端优化,包括优化变量、残差约束的构建,ceres求解器等。
VINS-Mono/Fusion代码学习系列:
从零学习VINS-Mono/Fusion源代码(一):主函数
从零学习VINS-Mono/Fusion源代码(二):前端图像跟踪
从零学习VINS-Mono/Fusion源代码(三):IMU预积分公式推导
从零学习VINS-Mono/Fusion源代码(四):误差卡尔曼滤波
从零学习VINS-Mono/Fusion源代码(五):VIO初始化
从零学习VINS-Mono/Fusion源代码(六):后端优化
从零学习VINS-Mono/Fusion源代码(六):后端优化
1 ceres自动求导与解析求导
-
VIO初始化利用ceres自动求导方式来构造cost_function,这种方法比较简单,只需要构造优化变量和残差求解式,不需要手动计算雅克比;缺点是求解速度较慢.
-
后端优化利用ceres解析求导,需要手动定义优化变量、残差及雅克比,通过这种方式提高计算速度,以满足里程计的实时性要求.

2 后端优化流程
2.1 定义待优化的参数块
problem.AddParameterBlock()
| 参数块 | 维数 | 代码命名 |
|---|---|---|
| 滑窗中的位姿 | 7 | para_Pose[WINDOW_SIZE + 1][SIZE_POSE] |
| 速度和零偏 | 9 | para_SpeedBias[WINDOW_SIZE + 1][SIZE_SPEEDBIAS] |
| 特征点深度 | 上限1000,维度1 | para_Feature[NUM_OF_F][SIZE_FEATURE] |
| 外参 | 7 | para_Ex_Pose[NUM_OF_CAM][SIZE_POSE] |
| 回环有关的位姿 | 7 | para_Retrive_Pose[SIZE_POSE] |
| 时间戳校正 | 1 | para_Td[1][1] |
| 没用到 | 1 | para_Tr[1][1] |
- 对于旋转,需要重新定义参数加法方式
- ceres参数块都是double数组类型,需要把初始化求解的eigen类型对象转为double,通过vector2double()实现
2.2 通过残差约束来添加残差块
残差约束:先验、IMU、视觉、回环
problem.AddResidualBlock()
(1)IMU预积分约束
由预积分公式引出,当位姿速度得到优化调整后,公式(5)就不再为等号. 同时,考虑到调整后的结果仍然不能过分偏离预积分,基于此,构造IMU残差.
其中,bias也得到了优化,利用雅克比矩阵,对预积分量进行补偿.

IMU预积分残差计算公式:

IMU预积分雅克比公式:
预积分残差r是一个15x1维的向量,状态量涉及位姿、速度和bias,需要对k和k+1时刻的para_Pose(7维)和para_SpeedBias(9维)求导,所以它的雅克比矩阵形式为(15x7, 15x9, 15x7, 15x9)

(2)视觉重投影约束
在第i帧和第j帧构建特征点的重投影误差,特征点以逆深度形式表示,本质上是把第i帧下的特征点转换到j帧下面去,跟观测到的归一化坐标作差,从而构建视觉重投影误差。
残差计算公式:

视觉残差雅克比:
重投影误差中涉及到的状态量有旋转外参Rbc,平移外参pbc,特征点逆深度,还有i和j两个时刻的位姿。采用链式求导的思想,依次计算残差对归一化坐标点的导数、归一化坐标点对状态量的导数。

(3)边缘化先验
对于滑窗中旧的信息,采用舒尔补的方式,边缘化掉旧的关键帧和地图点。
关于为什么要边缘化所有的地图点,是因为边缘化的过程会导致原本稀疏的矩阵变得稠密,不利于计算,所以vins边缘化所有的地图点,以减小矩阵的维度。
如下公式,我们要留下 δ x b \delta {x_b} δxb,边缘化 δ x a \delta {x_a} δxa,所以要把左下方矩阵块化为0矩阵。
这里借用白巧克力亦唯心大佬的博客:https://blog.csdn.net/heyijia0327/article/details/52822104
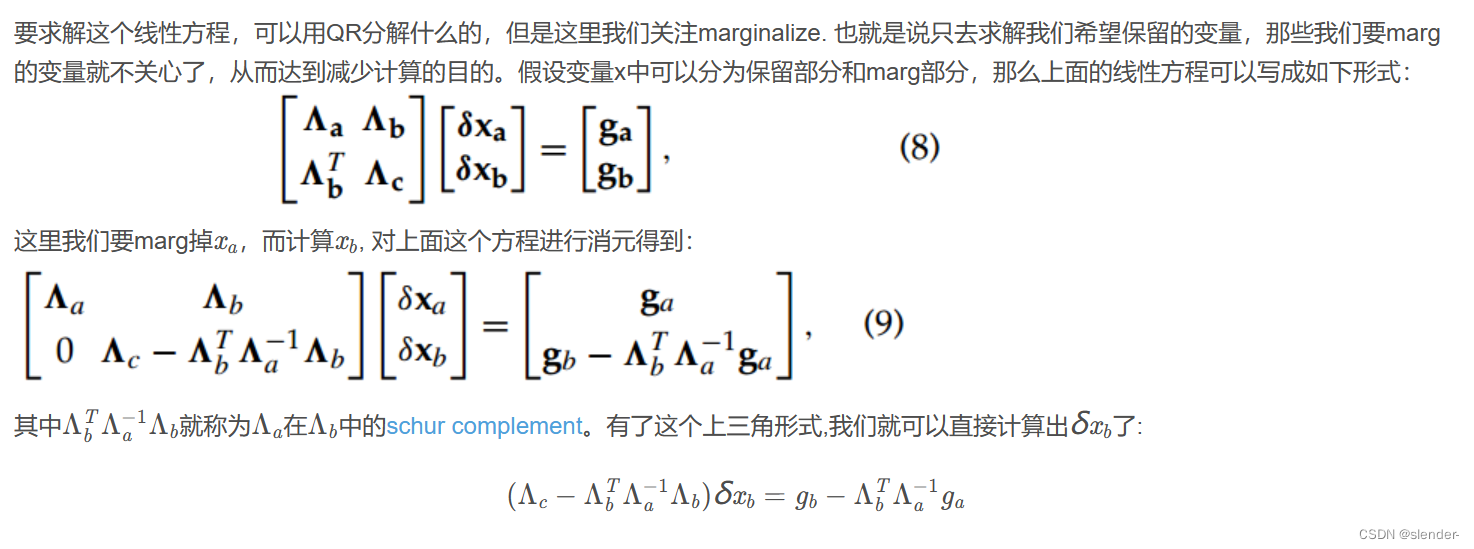
本质上在求解 δ x b \delta {x_b} δxb的过程中,保留了 δ x a \delta {x_a} δxa中的部分约束信息。
3 信息矩阵、FEJ、零空间漂移
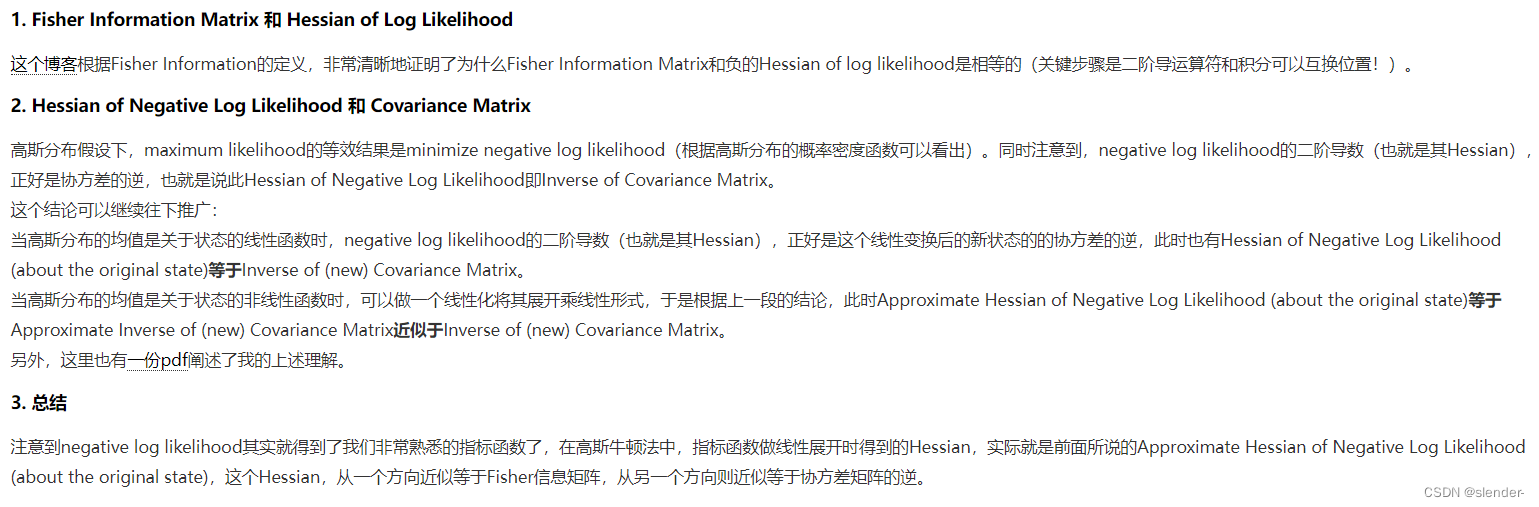
3.1 信息矩阵
通常认为信息矩阵等于协方差的逆,是对误差不确定性的一种衡量,在滑窗中用于对不同误差量统一量纲。
推导可以看这篇论文《Relationship between the Hessian and Covariance Matrix for Gaussian Random Variables》
需要注意的是,ceres求解器中并没有定义信息矩阵,所以vins代码在处理的过程中,对信息矩阵采用了LLT分解,再乘上雅克比矩阵。
3.2 FEJ
FEJ(First Estimated Jacobian)
在做边缘化之后,新的残差项和旧的信息矩阵,它们求解雅克比矩阵用的线性化点不同,会导致信息矩阵的零空间发生变化,可能导致零空间里的解变成了固定的一组解。
所以,不同残差对同一个状态求雅克比时,线性化点必须一致,避免零空间退化。
3.3 零空间漂移
VIO一般是四自由度不可观,yaw+xyz,roll和pitch能够通过重力确定绝对方向,尺度能够通过加速度计确定。所以在滑窗优化的过程中,整个滑窗图像帧可能会发生整体的漂移。
采取的方法通常有两种:
1、固定第一帧不优化,这样其他帧也就不会过分偏离第一帧
2、漂移之后,计算第一帧漂移了多少,把所有帧都移回去
VINS中采取的是第二种方法