前言
本文主要介绍VINS的状态估计器模块(estimator),从ROS角度说是estimator节点。
这个模块可以说是VINS的最核心模块,从论文的内容上来说,里面的内容包括了VINS的估计器初始化、基于滑动窗口的非线性优化实现紧耦合,即论文第五章(V. ESTIMATOR INITIALIZATION)第六章(VI. TIGHTLY-COUPLED MONOCULAR VIO)。
代码放在文件夹vins_estimator中,可以看到,除了上述内容外,还包括有外参标定、可视化等其他功能的实现,内容实在是太多了!所以本文主要是对vins_estimator文件夹内每个文件的代码功能进行简单整理,并从estimator_node.cpp开始,对状态估计器的具体流程进行代码解读,初始化以及紧耦合的理论知识和具体实现将放在以后进行详细说明。
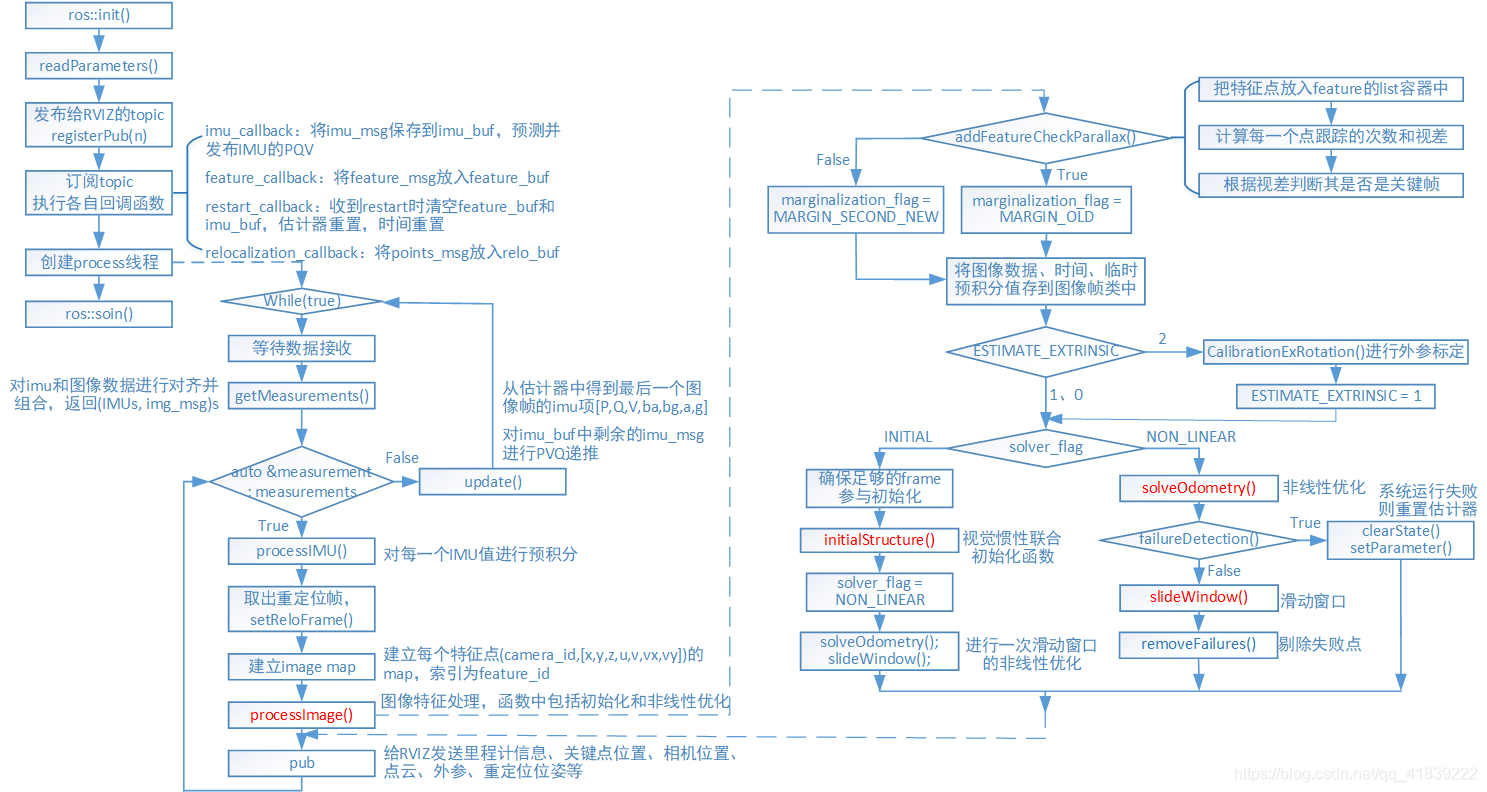
首先放上流程图!
vins_estimator文件夹
- factor:
- imu_factor.h:IMU残差、雅可比
- intergration_base.h:IMU预积分
- marginalization.cpp/.h:边缘化
- pose_local_parameterization.cpp/.h:局部参数化
- projection_factor.cpp/.h:视觉残差
- initial:
- initial_alignment.cpp/.h:视觉和IMU校准(陀螺仪偏置、尺度、重力加速度和速度)
- initial_ex_rotation.cpp/.h:相机和IMU外参标定
- initial_sfm.cpp/.h:纯视觉SFM
- solve_5pts.cpp/.h:5点法求基本矩阵
- utility:
- CameraPoseVisualization.cpp/.h:相机位姿可视化
- tic_toc.h:记录时间
- utility.cpp/.h:各种四元数、矩阵转换
- visualization.cpp/.h:各种数据发布
- estimator.cpp/.h:紧耦合的VIO状态估计器实现
- estimator_node.cpp:ROS 节点函数,回调函数
- feature_manager.cpp/.h:特征点管理,三角化,关键帧等
- parameters.cpp/.h:读取参数
代码实现
输入输出
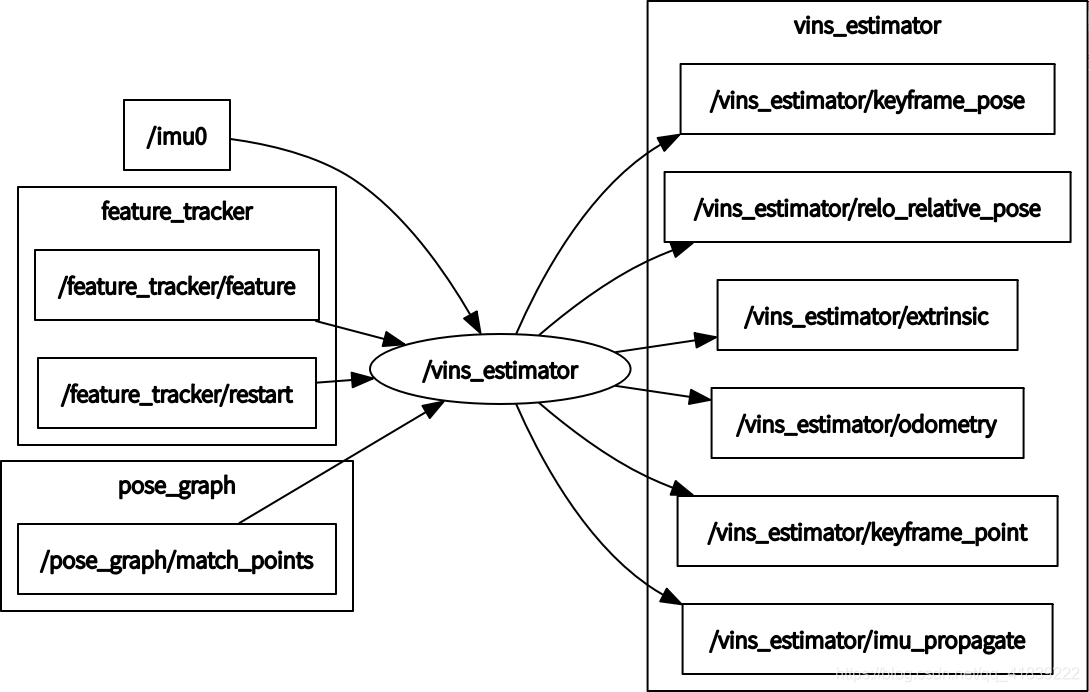
输入:
1、IMU的角速度和线加速度,即订阅了IMU发布的topic:IMU_TOPIC="/imu0"
2、图像追踪的特征点,即订阅了feature_trackers模块发布的topic:“/feature_tracker/feature"
3、复位信号,即订阅了feature_trackers模块发布的topic:“/feature_tracker/restart"
4、重定位的匹配点,即订阅了pose_graph模块发布的topic:“/pose_graph/match_points"
输出:
1、在线程void process()中给RVIZ发送里程计信息、关键点位置、相机位置、点云、外参、重定位位姿等
pubOdometry(estimator, header);//"odometry"
pubKeyPoses(estimator, header);//"key_poses"
pubCameraPose(estimator, header);//"camera_pose"
pubPointCloud(estimator, header);//"history_cloud"
pubTF(estimator, header);//"extrinsic"
pubKeyframe(estimator);//"keyframe_point"、"keyframe_pose"
if (relo_msg != NULL)
pubRelocalization(estimator);//"relo_relative_pose"
2、在回调函数void imu_callback(const sensor_msgs::ImuConstPtr &imu_msg)中将IMU的预测值作为最近一次里程计信息PQV进行发布
if (estimator.solver_flag == Estimator::SolverFlag::NON_LINEAR)
pubLatestOdometry(tmp_P, tmp_Q, tmp_V, header);//"imu_propagate"
estimator_node.cpp
| 函数 | 功能 |
|---|---|
| void predict | 从IMU测量值imu_msg和上一个PVQ递推得到当前PVQ |
| void update() | 得到窗口最后一个图像帧的imu项[P,Q,V,ba,bg,a,g],对imu_buf中剩余imu_msg进行PVQ递推 |
| getMeasurements() | 对imu和图像数据进行对齐并组合 |
| void imu_callback | imu回调函数,将imu_msg保存到imu_buf,IMU预测值并发布[P,Q,V,header] |
| void feature_callback | feature回调函数,将feature_msg放入feature_buf |
| void restart_callback | restart回调函数,收到restart消息时清空feature_buf和imu_buf,估计器重置,时间重置 |
| void relocalization_callback | relocalization回调函数,将points_msg放入relo_buf |
| void process() | VIO的主线程 |
| int main() | 程序入口 |
程序入口 int main(int argc, char **argv)
1、ROS初始化、设置句柄
ros::init(argc, argv, "vins_estimator");
ros::NodeHandle n("~");
ros::console::set_logger_level(ROSCONSOLE_DEFAULT_NAME, ros::console::levels::Info);
2、读取参数,设置状态估计器参数
readParameters(n);
estimator.setParameter();
3、发布用于RVIZ显示的Topic,本模块具体发布的内容详见输入输出
registerPub(n);
4、订阅IMU、feature、restart、match_points的topic,执行各自回调函数
ros::Subscriber sub_imu = n.subscribe(IMU_TOPIC, 2000, imu_callback, ros::TransportHints().tcpNoDelay());
ros::Subscriber sub_image = n.subscribe("/feature_tracker/feature", 2000, feature_callback);
ros::Subscriber sub_restart = n.subscribe("/feature_tracker/restart", 2000, restart_callback);
ros::Subscriber sub_relo_points = n.subscribe("/pose_graph/match_points", 2000, relocalization_callback);
5、创建VIO主线程
std::thread measurement_process{process};
4个回调函数
这里需要注意的一点是:节点estimator,以及创建了一个process,必须考虑多线程安全问题:
1、队列imu_buf、feature_buf、relo_buf是被多线程共享的,因而在回调函数将相应的msg放入buf或进行pop时,需要设置互斥锁m_buf,在操作前lock(),操作后unlock()。其他互斥锁同理。
2、在feature_callback和imu_callback中还设置了条件锁,在完成将msg放入buf的操作后唤醒作用于process线程中的获取观测值数据的函数。
std::condition_variable con;
con.notify_one();
3、在imu_callback中还通过lock_guard的方式构造互斥锁m_state,它能在构造时加锁,析构时解锁。
std::lock_guard<std::mutex> lg(m_state);
VIO主线程 void process()
通过while (true)不断循环,主要功能包括等待并获取measurements,计算dt,然后执行以下函数:
stimator.processIMU()进行IMU预积分
estimator.setReloFrame()设置重定位帧
estimator.processImage()处理图像帧:初始化,紧耦合的非线性优化
其中measurements的数据格式可以表示为:(IMUs, img_msg)s s表示容器(vector)
1、 等待上面两个接收数据完成就会被唤醒,在执行getMeasurements()提取measurements时互斥锁m_buf会锁住,此时无法接收数据。
getMeasurements()的作用是对imu和图像数据进行对齐并组合,之后会具体分析
std::unique_lock<std::mutex> lk(m_buf);
con.wait(lk, [&]
{
return (measurements = getMeasurements()).size() != 0;
});
lk.unlock();
2、对measurements中的每一个measurement (IMUs,IMG)组合进行操作
for (auto &measurement : measurements)
2.1、对于measurement中的每一个imu_msg,计算dt并执行processIMU()。
processIMU()实现了IMU的预积分,通过中值积分得到当前PQV作为优化初值
estimator.processIMU(dt, Vector3d(dx, dy, dz), Vector3d(rx, ry, rz));
2.2、在relo_buf中取出最后一个重定位帧,拿出其中的信息并执行setReloFrame()
// set relocalization frame
sensor_msgs::PointCloudConstPtr relo_msg = NULL;
while (!relo_buf.empty())
{
relo_msg = relo_buf.front();
relo_buf.pop();
}
if (relo_msg != NULL)
{
/*...*/
estimator.setReloFrame(frame_stamp, frame_index, match_points, relo_t, relo_r);
}
2.3、建立每个特征点的(camera_id,[x,y,z,u,v,vx,vy])s的map,索引为feature_id
map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> image;
for (unsigned int i = 0; i < img_msg->points.size(); i++)
{
int v = img_msg->channels[0].values[i] + 0.5;
int feature_id = v / NUM_OF_CAM;
int camera_id = v % NUM_OF_CAM;
/* double x,y,z,p_u,p_v,velocity_x,velocity_y */
ROS_ASSERT(z == 1);//判断是否归一化了 Eigen::Matrix<double, 7, 1> xyz_uv_velocity;
xyz_uv_velocity << x, y, z, p_u, p_v, velocity_x, velocity_y;
image[feature_id].emplace_back(camera_id, xyz_uv_velocity);
}
2.4、处理图像,这里实现了视觉与IMU的初始化以及非线性优化的紧耦合
estimator.processImage(image, img_msg->header);
2.5、向RVIZ发布里程计信息、关键位姿、相机位姿、点云和TF关系,这部分在之前输入输出已经介绍了
2.6、更新IMU参数[P,Q,V,ba,bg,a,g],注意线程安全
m_buf.lock();
m_state.lock();
if (estimator.solver_flag == Estimator::SolverFlag::NON_LINEAR)
update();//更新IMU参数[P,Q,V,ba,bg,a,g]
m_state.unlock();
m_buf.unlock();
std::vector<std::pair<std::vector<sensor_msgs::ImuConstPtr>, sensor_msgs::PointCloudConstPtr>> getMeasurements()
该函数的主要功能是对imu和图像数据进行对齐并组合,返回的是(IMUs, img_msg)s,即图像帧所对应的所有IMU数据,并将其放入一个容器vector中。
IMU和图像帧的对应关系在新版的代码中有变化:对图像帧j,每次取完imu_buf中所有时间戳小于它的imu_msg,以及第一个时间戳大于图像帧时间戳的imu_msg (这里还需要加上同步时间存在的延迟td)。
因此在新代码中,每个大于图像帧时间戳的第一个imu_msg是被两个图像帧共用的,而产生的差别在processIMU()前进行了对应的处理。
(这一部分我不知道自己理解的对不对,若有错误请指出!)
img: i -------- j - -------- k
imu: - jjjjjjjj - j+k kkkkkkkk -
std::vector<std::pair<std::vector<sensor_msgs::ImuConstPtr>, sensor_msgs::PointCloudConstPtr>>
getMeasurements()
{
std::vector<std::pair<std::vector<sensor_msgs::ImuConstPtr>, sensor_msgs::PointCloudConstPtr>> measurements;
while (true)
{
//直到把缓存中的图像特征数据或者IMU数据取完,才能够跳出此函数
if (imu_buf.empty() || feature_buf.empty())
return measurements;
//对齐标准:IMU最后一个数据的时间要大于第一个图像特征数据的时间
if (!(imu_buf.back()->header.stamp.toSec() > feature_buf.front()->header.stamp.toSec() + estimator.td))
{
//ROS_WARN("wait for imu, only should happen at the beginning");
sum_of_wait++;
return measurements;
}
//对齐标准:IMU第一个数据的时间要小于第一个图像特征数据的时间
if (!(imu_buf.front()->header.stamp.toSec() < feature_buf.front()->header.stamp.toSec() + estimator.td))
{
ROS_WARN("throw img, only should happen at the beginning");
feature_buf.pop();
continue;
}
sensor_msgs::PointCloudConstPtr img_msg = feature_buf.front();
feature_buf.pop();
std::vector<sensor_msgs::ImuConstPtr> IMUs;
//图像数据(img_msg),对应多组在时间戳内的imu数据,然后塞入measurements
while (imu_buf.front()->header.stamp.toSec() < img_msg->header.stamp.toSec() + estimator.td)
{
//emplace_back相比push_back能更好地避免内存的拷贝与移动
IMUs.emplace_back(imu_buf.front());
imu_buf.pop();
}
//这里把下一个imu_msg也放进去了,但没有pop
//因此当前图像帧和下一图像帧会共用这个imu_msg
IMUs.emplace_back(imu_buf.front());
if (IMUs.empty())
ROS_WARN("no imu between two image");
measurements.emplace_back(IMUs, img_msg);
}
return measurements;
}
estimator.cpp/.h
构建了一个estimator类,这次我们主要讨论流程问题,因而暂时只分析一下processImage()
| 方法 | 功能 |
|---|---|
| void Estimator::setParameter() | 设置部分参数 |
| void Estimator::clearState() | 清空或初始化滑动窗口中所有的状态量 |
| void Estimator::processIMU() | 处理IMU数据,预积分 |
| void Estimator::processImage() | 处理图像特征数据 |
| bool Estimator::initialStructure() | 视觉的结构初始化 |
| bool Estimator::visualInitialAlign() | 视觉惯性联合初始化 |
| bool Estimator::relativePose() | 判断两帧有足够视差30且内点数目大于12则可进行初始化,同时得到R和T |
| void Estimator::solveOdometry() | VIO非线性优化求解里程计 |
| void Estimator::vector2double() | vector转换成double数组,因为ceres使用数值数组 |
| void Estimator::double2vector() | 数据转换,vector2double的相反过程 |
| bool Estimator::failureDetection() | 检测系统运行是否失败 |
| void Estimator::optimization() | 基于滑动窗口的紧耦合的非线性优化,残差项的构造和求解 |
| void Estimator::slideWindow() | 滑动窗口法 |
| void Estimator::setReloFrame() | 重定位操作 |
void Estimator::processImage()
1、addFeatureCheckParallax()添加之前检测到的特征点到feature容器list中,计算每一个点跟踪的次数,以及它的视差并通过检测两帧之间的视差决定是否作为关键帧
param[in] frame_count 窗口内帧的个数
param[in] image 某帧所有特征点的[camera_id,[x,y,z,u,v,vx,vy]]构成的map,索引为feature_id
param[in] td 相机和IMU同步校准得到的时间差
if (f_manager.addFeatureCheckParallax(frame_count, image, td))
marginalization_flag = MARGIN_OLD;//=0
else
marginalization_flag = MARGIN_SECOND_NEW;//=1
2、 将图像数据、时间、临时预积分值存到图像帧类中
ImageFrame imageframe(image, header.stamp.toSec());
imageframe.pre_integration = tmp_pre_integration;
all_image_frame.insert(make_pair(header.stamp.toSec(), imageframe));
3、更新临时预积分初始值
tmp_pre_integration = new IntegrationBase{acc_0, gyr_0, Bas[frame_count], Bgs[frame_count]};
4、判断是否需要进行外参标定
if(ESTIMATE_EXTRINSIC == 2)//如果没有外参则进行标定
{
ROS_INFO("calibrating extrinsic param, rotation movement is needed");
if (frame_count != 0)
{
vector<pair<Vector3d, Vector3d>> corres = f_manager.getCorresponding(frame_count - 1, frame_count);
Matrix3d calib_ric;
if (initial_ex_rotation.CalibrationExRotation(corres, pre_integrations[frame_count]->delta_q, calib_ric))
{
ROS_WARN("initial extrinsic rotation calib success");
ROS_WARN_STREAM("initial extrinsic rotation: " << endl << calib_ric);
ric[0] = calib_ric;
RIC[0] = calib_ric;
ESTIMATE_EXTRINSIC = 1;
}
}
}
5、solver_flag==INITIAL 进行初始化
5.1、确保有足够的frame参与初始化,有外参,且当前帧时间戳大于初始化时间戳+0.1秒
5.2、执行视觉惯性联合初始化
result = initialStructure();
initial_timestamp = header.stamp.toSec();
5.3、初始化成功则进行一次非线性优化,不成功则进行滑窗操作
if(result)//初始化成功
{
solver_flag = NON_LINEAR;
solveOdometry();
slideWindow();
f_manager.removeFailures();
ROS_INFO("Initialization finish!");
last_R = Rs[WINDOW_SIZE];
last_P = Ps[WINDOW_SIZE];
last_R0 = Rs[0];
last_P0 = Ps[0];
}
else
slideWindow();
6、solver_flag==NON_LINEAR进行非线性优化
6.1、执行非线性优化具体函数solveOdometry()
6.2、检测系统运行是否失败,若失败则重置估计器
if (failureDetection())//失败
{
ROS_WARN("failure detection!");
failure_occur = 1;
clearState();
setParameter();
ROS_WARN("system reboot!");
return;
}
6.3、执行窗口滑动函数slideWindow();
6.4、去除估计失败的点并发布关键点位置
f_manager.removeFailures();
ROS_DEBUG("marginalization costs: %fms", t_margin.toc());
// prepare output of VINS
key_poses.clear();
for (int i = 0; i <= WINDOW_SIZE; i++)
key_poses.push_back(Ps[i]);
void update()
这个函数在非线性优化时才会在process()中被调用
1、从估计器中得到滑动窗口中最后一个图像帧的imu更新项[P,Q,V,ba,bg,a,g]
latest_time = current_time;
tmp_P = estimator.Ps[WINDOW_SIZE];
tmp_Q = estimator.Rs[WINDOW_SIZE];
tmp_V = estimator.Vs[WINDOW_SIZE];
tmp_Ba = estimator.Bas[WINDOW_SIZE];
tmp_Bg = estimator.Bgs[WINDOW_SIZE];
acc_0 = estimator.acc_0;
gyr_0 = estimator.gyr_0;
2、对imu_buf中剩余的imu_msg进行PVQ递推
(因为imu的频率比图像频率要高很多,在getMeasurements()将图像和imu时间对齐后,imu_buf中还会存在imu数据)
queue<sensor_msgs::ImuConstPtr> tmp_imu_buf = imu_buf;
for (sensor_msgs::ImuConstPtr tmp_imu_msg; !tmp_imu_buf.empty(); tmp_imu_buf.pop())
predict(tmp_imu_buf.front());