回归预测 | MATLAB实现DBN-ELM深度置信网络结合极限学习机多输入单输出回归预测
预测效果



基本介绍
1.MATLAB实现DBN-ELM深度置信网络结合极限学习机多输入单输出回归预测;
2.多输入单输出回归预测。
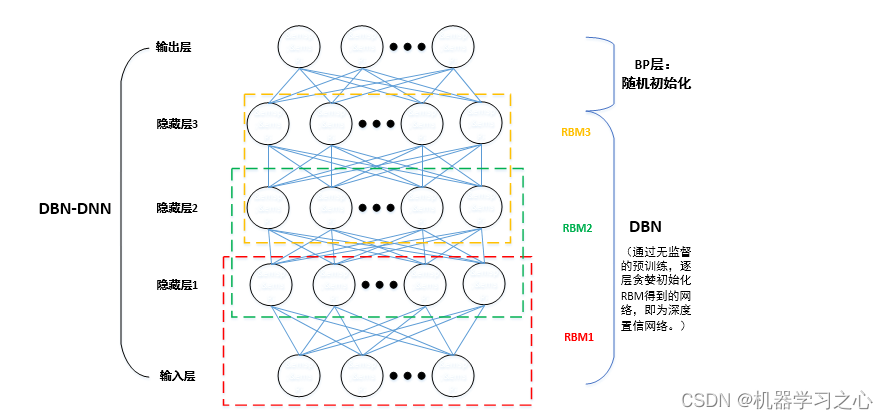
3.深度信念网络,DBN,Deep Belief Nets,神经网络的一种。既可以用于非监督学习,类似于一个自编码机;也可以用于监督学习,作为分类器来使用。DBN由若干层神经元构成,组成元件是受限玻尔兹曼机(RBM)。
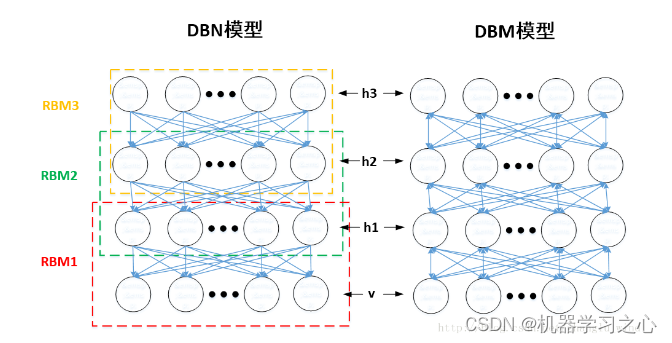
RBM是一种神经感知器,由一个显层和一个隐层构成,显层与隐层的神经元之间为双向全连接。限制玻尔兹曼机和玻尔兹曼机相比,主要是加入了“限制”。限制玻尔兹曼机可以用于降维(隐层少一点),学习特征(隐层输出就是特征),深度信念网络(多个RBM堆叠而成)等。
模型描述
受限玻尔兹曼机(RBM)是一种具有随机性的生成神经网络结构,它本质上是一种由具有随机性的一层可见神经元和一层隐藏神经元所构成的无向图模型。它只有在隐藏层和可见层神经元之间有连接,可见层神经元之间以及隐藏层神经元之间都没有连接。并且,隐藏层神经元通常取二进制并服从伯努利分布,可见层神经元可以根据输入的类型取二进制或者实数值。
程序设计
- 完整源码和数据获取方式:私信博主回复MATLAB实现DBN-ELM深度置信网络结合极限学习机多输入单输出回归预测。
%受限玻尔兹曼机预训练程序
% This program trains Restricted Boltzmann Machine in which
% visible, binary, stochastic pixels are connected to
% hidden, binary, stochastic feature detectors using symmetrically
% weighted connections. Learning is done with 1-step Contrastive Divergence.
% The program assumes that the following variables are set externally:
% maxepoch -- maximum number of epochs
% numhid -- number of hidden units
% batchdata -- the data that is divided into batches (numcases numdims numbatches)
% restart -- set to 1 if learning starts from beginning
% 参数设置
epsilonw = 0.01; % Learning rate for weights 权值学习率
epsilonvb = 0.01; % Learning rate for biases of visible units可视节点的偏置学习率
epsilonhb = 0.01; % Learning rate for biases of hidden units 隐含节点的偏置学习率
weightcost = 0.0008; %权重衰减系数
initialmomentum = 0.5; %初始动量项
finalmomentum = 0.9; %确定动量项
[numcases,numdims ,numbatches]=size(batchdata);
if restart ==1,
restart=0;
epoch=1;
% Initializing symmetric weights and biases.
vishid = 0.1*randn(numdims, numhid);%可视节点到隐含节点之间的权值初始化
hidbiases = zeros(1,numhid);%隐含节点的初始化为0
visbiases = zeros(1,numdims);%可视节点偏置初始化为0
poshidprobs = zeros(numcases,numhid);%初始化单个迷你块正向传播时隐含层的输出概率
neghidprobs = zeros(numcases,numhid);
posprods = zeros(numdims,numhid);
negprods = zeros(numdims,numhid);
vishidinc = zeros(numdims,numhid);
hidbiasinc = zeros(1,numhid);
visbiasinc = zeros(1,numdims);
%整个数据集正向传播时隐含层的输出概率
batchposhidprobs=zeros(numcases,numhid,numbatches);
end
for epoch = epoch:maxepoch,%所有迭代次数
%fprintf(1,'epoch %d\r',epoch);
errsum=0;
for batch = 1:numbatches, %每次迭代都遍历所有的数据块
%fprintf(1,'epoch %d batch %d\r',epoch,batch);
%%%%%%%%% 开始正向阶段的计算%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
data = batchdata(:,:,batch); %每次迭代选择一个迷你块的数据,,每一行代表一个样本值
%这里的数据并非二值的,严格来说,应该将其进行二值化
poshidprobs = 1./(1 + exp(-data*vishid - repmat(hidbiases,numcases,1)));
%计算隐含层节点的输出概率,所用的是sigmoid函数
%%%计算正向阶段的参数统计量%%%%%%%%%%%%%%%%%%%%
batchposhidprobs(:,:,batch)=poshidprobs;
posprods = data' * poshidprobs;%用可视节点向量和隐含层节点向量的乘积计算正向散度统计量
poshidact = sum(poshidprobs); %针对样本值进行求和,用于计算隐含节点的偏置
posvisact = sum(data); %对数据进行求和,用于计算可视节点的偏置,当迷你块中样本的个数为1时,
% 求得的偏置向量中的又换宿相同,此时会影响预训练的结果
%%%%%%%%% 正向阶段结束 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
poshidstates = poshidprobs > rand(numcases,numhid);
%将隐含层的概率激活值poshidprobs进行0.1二值化,按照概率值大小来判定。rand(m,n)产生
%m*n大小的矩阵,将poshidprobs中的值和rand产生的比较,如果大于随机矩阵对应位置的值,则将其相应位置为1,否则为0
%%%%%%%%% 开始反向阶段的计算 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
negdata = 1./(1 + exp(-poshidstates*vishid' - repmat(visbiases,numcases,1)));
%反向阶段计算可视节点的值
neghidprobs = 1./(1 + exp(-negdata*vishid - repmat(hidbiases,numcases,1)));
%计算隐含层节点的概率值
negprods = negdata'*neghidprobs;
%计算反向散度统计量
neghidact = sum(neghidprobs);
negvisact = sum(negdata);
%%%%%%%%% 反向阶段结束 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
err= sum(sum( (data-negdata).^2 ));%计算训练集中原始数据和重构数据之间的重构误差
errsum = err + errsum;
if epoch>5,
momentum=finalmomentum; %在迭代更新参数过程中,前4次使用初始动量项,之后使用确定动量项
else
momentum=initialmomentum;
end;
%%%%%%%%%以下代码用于更新权值和偏置%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
vishidinc = momentum*vishidinc + ...%权值更新时的增量
epsilonw*( (posprods-negprods)/numcases - weightcost*vishid);
visbiasinc = momentum*visbiasinc + (epsilonvb/numcases)*(posvisact-negvisact);
%可视层偏置更新时的增量
hidbiasinc = momentum*hidbiasinc + (epsilonhb/numcases)*(poshidact-neghidact);
%隐含层偏置更新时的增量
vishid = vishid + vishidinc;%更新权值
visbiases = visbiases + visbiasinc;%更新可视层偏置
hidbiases = hidbiases + hidbiasinc;%更新隐含层偏置
%%%%%%%%%%%%%%%% END OF UPDATES %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
end
%fprintf(1, 'epoch %4i error %6.1f \n', epoch, errsum);
end;
%%%每次迭代结束后,显示训练集的重构误差
参考资料
[1] https://blog.csdn.net/article/details/126195343?spm=1001.2014.3001.5501
[2] https://blog.csdn.net/article/details/126189867?spm=1001.2014.3001.5501