文章目录
论文详解
Deformable Convolution
普通卷积的数学表达
普通的二维卷积包括两个步骤:
1)在输入特征图x上使用regular gird R进行采样;
2)以w加权的采样值的总和。网格R定义接收域的大小和扩张。例如,
R = { ( − 1 , − 1 ) , ( − 1 , 0 ) , … , ( 0 , 1 ) , ( 1 , 1 ) } \mathcal{R}=\{(-1,-1),(-1,0), \ldots,(0,1),(1,1)\} R={(−1,−1),(−1,0),…,(0,1),(1,1)}
定义了一个dilation=1, 3x3的卷积。
对于输出特征图 y y y上的每个位置 p 0 p_0 p0,
Eq(1)
y ( p 0 ) = ∑ p n ∈ R w ( p n ) ⋅ x ( p 0 + p n ) , \mathbf{y}\left(\mathbf{p}_0\right)=\sum_{\mathbf{p}_n \in \mathcal{R}} \mathbf{w}\left(\mathbf{p}_n\right) \cdot \mathbf{x}\left(\mathbf{p}_0+\mathbf{p}_n\right), y(p0)=pn∈R∑w(pn)⋅x(p0+pn),
其中 p n p_n pn穷举了 R \mathcal{R} R中的所有位置。
可变形卷积的数学表达
在可变形卷积中,regular grid R用偏移量 { Δ p n ∣ n = 1 , … , N } \left\{\Delta \mathbf{p}_n \mid n=1, \ldots, N\right\} {
Δpn∣n=1,…,N}进行增广, 其中 N = ∣ R ∣ N=|\mathcal{R}| N=∣R∣
上述的式子就变成了:
Eq(2)
y ( p 0 ) = ∑ p n ∈ R w ( p n ) ⋅ x ( p 0 + p n + Δ p n ) \mathbf{y}\left(\mathbf{p}_0\right)=\sum_{\mathbf{p}_n \in \mathcal{R}} \mathbf{w}\left(\mathbf{p}_n\right) \cdot \mathbf{x}\left(\mathbf{p}_0+\mathbf{p}_n+\Delta \mathbf{p}_n\right) y(p0)=pn∈R∑w(pn)⋅x(p0+pn+Δpn)
现在,采样是在不规则和偏移位置 p n + ∆ p n p_n+∆p_n pn+∆pn上。由于偏移量 ∆ p n ∆p_n ∆pn通常为分数阶,因此通过双线性插值实现式(3)为:
Eq(3)
x ( p ) = ∑ q G ( q , p ) ⋅ x ( q ) \mathbf{x}(\mathbf{p})=\sum_{\mathbf{q}} G(\mathbf{q}, \mathbf{p}) \cdot \mathbf{x}(\mathbf{q}) x(p)=q∑G(q,p)⋅x(q)
其中 p p p表示任意(分数)位置(对于Eq. (2) p = p 0 + p n + ∆ p n p = p_0 +p_n +∆p_n p=p0+pn+∆pn), q q q 枚举特征映射x中所有积分空间位置,G(·,·)为双线性插值核。注意G是二维的。它被分成两个一维的核:
Eq(4)
G ( q , p ) = g ( q x , p x ) ⋅ g ( q y , p y ) G(\mathbf{q}, \mathbf{p})=g\left(q_x, p_x\right) \cdot g\left(q_y, p_y\right) G(q,p)=g(qx,px)⋅g(qy,py)
其中 g ( a , b ) = m a x ( 0 , 1 − ∣ a − b ∣ ) g(a, b) = max(0,1−|a−b|) g(a,b)=max(0,1−∣a−b∣)。Eq.(3)的计算速度很快,因为G(q, p)仅在几个q中是非零的。
如图2所示,偏移量是通过在相同的输入特征图上应用卷积层获得的。卷积核与当前卷积层具有相同的空间分辨率和膨胀(图2中也是3 × 3的kernel)。

个人理解
原始图片的大小为 b × c × h × w b\times c\times h\times w b×c×h×w), 记为U(图中的最左边的input feature map)
经过一个普通卷积(上图的conv), 卷积填充为same, 即输出输入大小不变, 对应的输出结果为( b × h × w × 2 N b\times h\times w\times 2N b×h×w×2N), 记为V 。
输出的结果是指原图片batch中每个像素的偏移量, x方向偏移与y方向的偏移, 因此为2N。(N是指卷积核的大小,如果是3x3的卷积核,则N=9 )
将U中图片的像素索引值(即坐标)与V(坐标偏移量)相加, 得到偏移后的position (即在原始图片U中的坐标值), 需要将position值限定为图片大小以内, 但position只是一个坐标值, 而且还是float类型的, 我们需要这些float类型的坐标值获取像素。

如上图所示,只有蓝色的和红色的点存在一个像素值(它们的横纵坐标值均为整数)
假设黄色的点是我们偏移后的position, 它的坐标值设为(a,b), 其中a,b均是浮点数,此时黄色的点的位置是不存在像素值的。
那么怎样才可以得到黄色点对应的像素值呢?我们利用黄色点周围的4个像素点(红色的点)进行双线性插值。
红色点对应的坐标是坐标 ( f l o o r ( a ) , f l o o r ( b ) ) , ( ( f l o o r ( a ) , c e i l ( b ) ) , ( ( c e i l ( a ) , f l o o r ( b ) ) , ( ( c e i l ( a ) , c e i l ( b ) ) (floor(a),floor(b)), ((floor(a),ceil(b)), ((ceil(a),floor(b)), ((ceil(a),ceil(b)) (floor(a),floor(b)),((floor(a),ceil(b)),((ceil(a),floor(b)),((ceil(a),ceil(b)) 这四对坐标每个坐标都对应U中的一个像素值, 而我们需要得到(a,b)的像素值, 这里采用双线性差值的方式计算, 因为一方面得到的像素准确, 另一方面可以进行反向传播。双线性插值参考:《超分任务中常见的上采样方式》

DCN的卷积过程和普通卷积一样,如上图所示,假设有个2x2的kernel, 它也是以一个2x2的滑窗的形式(绿色的框)在原始图片上从左到右,从上到下进行滑动 。
和普通的卷积的区别在于,当滑动到当前位置时,普通卷积会将卷积核(绿点)和原始像素(红点)对应的值相乘后相加,得到输出的值。
可变形卷积是将卷积核(绿点)和采样点(彩色圆圈)对应的值相乘后相加。其中采样点的像素值就是通过上一步的双线性插值得到的。
Deformable RoI Pooling
所有基于区域建议的目标检测方法都采用RoI池化方法。它将任意大小的输入矩形区域转换为固定大小的特征。它将任意大小的输入矩形区域转换为固定大小的特征。
- RoI Pooling
给定输入的特征图 x x x 和一个大小为 w × h w×h w×h 和左上角为 p 0 p_0 p0的RoI, RoI池化将RoI分成 k × k k×k k×k个 bins ( k k k 是一个自由参数),并输出 k × k k ×k k×k的特征图 y y y。对于第 ( i , j ) (i, j) (i,j)个 bin ( 0 ≤ i , j < k 0≤i, j < k 0≤i,j<k),
Eq(5)
y ( i , j ) = ∑ p ∈ bin ( i , j ) x ( p 0 + p ) / n i j \mathbf{y}(i, j)=\sum_{\mathbf{p} \in \operatorname{bin}(i, j)} \mathbf{x}\left(\mathbf{p}_0+\mathbf{p}\right) / n_{i j} y(i,j)=p∈bin(i,j)∑x(p0+p)/nij
其中 n i j n_{ij} nij是bin中的pixel的数量。第 ( i , j ) (i,j) (i,j)个bin span为 ⌊ i w k ⌋ ≤ p x < ⌈ ( i + 1 ) w k ⌉ \left\lfloor i \frac{w}{k}\right\rfloor \leq p_x<\left\lceil(i+1) \frac{w}{k}\right\rceil ⌊ikw⌋≤px<⌈(i+1)kw⌉, ⌊ j h k ⌋ ≤ p y < ⌊ ( j + 1 ) h k ⌋ \left\lfloor j \frac{h}{k}\right\rfloor \leq p_y< \left\lfloor (j+1) \frac{h}{k}\right\rfloor ⌊jkh⌋≤py<⌊(j+1)kh⌋
与Eq.(2)相似,在可变形RoI池化中,将偏移量 { ∆ p i j ∣ 0 ≤ i , j < k } \{∆p_{ij}|0≤i, j < k\} { ∆pij∣0≤i,j<k}加到空间分块位置上。式(5)得到
Eq(6)
y ( i , j ) = ∑ p ∈ bin ( i , j ) x ( p 0 + p + Δ p i j ) / n i j \mathbf{y}(i, j)=\sum_{\mathbf{p} \in \operatorname{bin}(i, j)} \mathbf{x}\left(\mathbf{p}_0+\mathbf{p}+\Delta \mathbf{p}_{i j}\right) / n_{i j} y(i,j)=p∈bin(i,j)∑x(p0+p+Δpij)/nij
通常, ∆ p i j ∆p_{ij} ∆pij是分数。式(6)通过式(3)和式(4)的双线性插值实现。
图3演示了如何获取偏移量。首先,RoI池化(Eq.(5))生成池化的特征图。从图中,fc层生成归一化的偏移量 ∆ p ^ i j ∆\hat p_{ij} ∆p^ij,然后通过与RoI的宽度和高度的元素级乘积转换为公式(6)中的偏移量∆pij,即 Δ p i j = γ ⋅ Δ p ^ i j ∘ ( w , h ) \Delta \mathbf{p}_{i j}=\gamma \cdot \Delta \widehat{\mathbf{p}}_{i j} \circ(w, h) Δpij=γ⋅Δp ij∘(w,h)。这里γ是一个预定义的标量,用于调节偏移量的大小。经验值为γ = 0.1。为了使偏移学习不受RoI大小的影响,偏移归一化是必要的。

个人理解
ROI Pooling 将任意大小的特征图转换成固定大小的特征向量。如下图所示,从左到右分别将ROI划分成了1*1个bins、2*2个bins、3*3个bins。就是说,如果我们需要的特征向量大小是 k 2 k^2 k2个,则把原始的RIO划分成 k × k k\times k k×k个bin,然后对每个bin中的值求平均,就得到了对应的特征向量的值。

如下图所示,假设原始图片大小是4x4(下图蓝色的实心点), 然后我们把原始图片划分成2x2个bins(下图中4个框)。
如果是普通的ROI Pooling,会对每个框中的4个蓝色的实心点对应的像素值求平均。
如果是可变形的ROI Pooling, 会对每个框中的采样点(图中的圆圈)求平均。采样点的像素值和上文中提到的可变形卷积中的一样,也是通过双线性插值得到的。

- Position-Sensitive (PS) RoI Pooling
PS ROI Pooling 是fully convolutional的,不同于RoI Pooling。通过一个conv层,所有的输入特征图首先被转换为每个对象类的 k 2 k^2 k2 score map (C对象类总共C + 1),如图4的底部分支所示。不需要区分类别,这样的分数映射被表示为 x i , j {x_{i,j}} xi,j,其中 ( i , j ) (i, j) (i,j)枚举所有的bins。在这些score map上执行池化。第(i, j)个bin的输出值是由对应于该bin的一个得分映射 x i , j x_{i,j} xi,j的总和得到的。简而言之,与式(5)中的RoI池化不同的是,将一般的feature map x替换为特定的positive-sensitive score map x i , j x_{i,j} xi,j。

个人理解
我们通过R-FCN论文中的图来理解位置敏感的ROI Pooling (Position-Sensitive RoI Pooling)
如下图,R-FCN会在共享卷积层的最后再接上一层卷积层,而该卷积层输出的结果就是position-sensitive score map

position-sensitive score map的height和width和共享卷积层的一样,但是它的channels= k 2 ( C + 1 ) k^2(C+1) k2(C+1)。那么C表示物体类别种数再加上1个背景类别,每个类别都有 k 2 k^2 k2个score maps。
因为特征图划分成 k × k k\times k k×k 个bins, 把每个类别的第 i i i个特征图的第 i i i个bin区域按照bin原本的位置组合在一起,构成一个类别的score map。
score map出现高响应值的位置,表示该位置有该类别的概率很大。每个类别的score map在通道维度连接在一起,就构成了 k × k × ( C + 1 ) k\times k \times (C+1) k×k×(C+1)的张量。
对于每个类别,该类别的 k 2 k^2 k2个值都表示该ROI属于该类别的响应值,则把这个 k 2 k^2 k2个值相加,就得到了该类别的Score, 所有类别的score构成了一个 C + 1 C+1 C+1 的张量,再经过softmax,就可以得到属于各个类别的概率。
Deformable ConvNets
可变形卷积和RoI池化模块的输入和输出与普通版本相同。因此,它们可以很容易地替换现有cnn中的普通版本。在训练中,这些为偏移学习增加的conv层和fc层以零权值初始化。它们的学习率设置为现有层学习率的β倍(β默认为1,fc层在Faster R-CNN中为β = 0.01)。通过式(3)和式(4)中的双线性插值运算进行反向传播训练。得到的cnn称为deformable ConvNets.。
为了将可变形的卷积神经网络与最先进的CNN架构集成在一起,我们注意到这些架构包括两个阶段。首先,深度全卷积网络生成整个输入图像的特征映射。其次,基于任务的浅层网络根据特征映射生成结果。我们将在下面详细说明两个步骤。
- Deformable Convolution for Feature Extraction
我们采用了两种最先进的特征提取架构:ResNet-101[20]和InceptionResNet[46]的修改版本。两者都是在ImageNet[7]数据集上预训练的。
最初的Inception-ResNet是为图像识别而设计的。它存在特征不对齐的问题,对于密集的预测任务是有问题的。对其进行了修改,以解决对准问题[18]。修改后的版本被称为“Aligned-Inception-ResNet”。请在本文的arxiv在线版本中找到它的详细信息。
两个模型都由几个卷积块、一个平均池和一个用于ImageNet分类的1000路fc层组成。去掉了平均池和fc层。最后加入一个随机初始化的1 × 1卷积,使信道维数减少到1024。在通常的实践中[3,6],最后一个卷积块的有效步长从32像素减小到16像素,以提高feature map的分辨率。具体来说,在最后一个区块的开始,步幅从2改变为1(“conv5”的ResNet-101和Aligned-Inception-ResNet)。为了进行补偿,将该块(内核大小为> 1)中所有卷积滤波器的扩展从1更改为2。
可选地,可变形卷积应用于最后几个卷积层(内核大小为> 1)。我们实验了不同数量的这类层,发现3是不同任务的一个很好的权衡,如表1所示。

- Segmentation and Detection Networks
在上述特征提取网络的输出特征映射的基础上,构建任务特定网络。
在下文中,C表示对象类的数量。
DeepLab[4]是一种最先进的语义分割方法。它在特征图上添加1 × 1的卷积层,生成表示逐像素分类分数的(C + 1)图。接下来的softmax输出逐像素概率。
Category-Aware RPN与[42]中的region proposal网络几乎相同,只是用(C + 1)类卷积分类器代替了2类(对象或非对象)卷积分类器
Faster R-CNN[42]是最先进的探测器。在我们的实现中,RPN分支被添加到conv4块的顶部,紧随[42]。在之前的实践中[20,22],在ResNet-101的conv4和conv5块之间插入了RoI池化层,每个RoI留下10层。该设计具有良好的精度,但每roi计算量较高。相反,我们采用了[34]中的简化设计。最后增加RoI池层。在集合RoI特征的基础上,增加了维度1024的两个fc层,然后是边界框回归和分类分支。虽然这样的简化(从10层conv5块到2 fc层)会略微降低精度,但它仍然是一个足够强的基线,在本工作中不需要关注。
可选地,RoI Pooling 层可以更改为Deformable RoI Pooling。
R-FCN[6]是另一种最先进的探测器。它的每roi计算成本可以忽略不计。我们遵循最初的实现。可选地,它的RoI池层可以更改为可变形的位置敏感RoI池。
Understanding Deformable ConvNets
这项工作是建立在增加空间采样位置的卷积和带有额外的偏移的RoI池化并从目标任务的学习偏移。
图5展示了可变形卷积的叠加效果。展示了3层deformabel convolution的叠加效果,由于每层采样 3 × 3 = 9 3\times 3=9 3×3=9个点,每个绿色的激活点,三层下来对应采样 9 3 = 729 9^3=729 93=729个点(红色)。从左到右分别是背景、小物体、大物体的采样效果。

表2提供了这种自适应变形的定量证据。

可变形RoI池化的效果类似,如图7所示。网格结构的规律性在标准RoI池中不再适用。相反,部分偏离RoI bin,移动到附近的对象前景区域。增强了定位能力,特别是对非刚体的定位能力。

思考
为什么叫做可变形卷积呢

可变形卷积就是给每个卷积核添加一个方向向量,使得卷积核可以自适应的变成任意的形状,因此也叫做”可变形卷积。
可变形卷积有什么用呢?
同一层的CNN的激活单元的感受野尺度相同,传统的方法的感受野位置受限。
不同的位置对应着不同尺度和形变的物体,卷积层需要能够自动的调整尺度和感受野,更好的提取输入的特征

最上层是在大小不同的两个物体上的一个激活单元,中间层和底层是为了得到上一层激活单元的采样过程。可以看到可变形卷积在采样时可以更贴近物体的形状和尺寸。

代码详解
class DeformConv2D(nn.Module) 就是定义了二维可变形卷积的类。下面我们分别介绍该类中各个方法。
__init__
- 功能: 初始化
class DeformConv2D(nn.Module):
def __init__(self, inc, outc, kernel_size=3, padding=1, bias=None):
super(DeformConv2D, self).__init__()
self.kernel_size = kernel_size # 卷积核的大小
self.padding = padding # 填充大小
self.zero_padding = nn.ZeroPad2d(padding) # 用0去填充
self.conv_kernel = nn.Conv2d(inc, outc, kernel_size=kernel_size, stride=kernel_size, bias=bias) # 二维卷积
forward
- 功能:定义前向传播的过程
def forward(self, x, offset):
'''
x: 原始输入 [b,c,h,w]
offset: 每个像素点的偏移 [b,2*N,h,w]
N:kernel中元素的个数 = k*k
offset 和 x的宽高相同,表示的是对应位置像素点的偏移
offset 的第二个维度大小是2N, 当N=9时,排列顺序是(x1, y1, x2, y2, ...x18,y18)
xi表示一个大小为[h,w]的张量,表示对于原始图像中的每个点,对于kernel中的第i个元素,在x轴方向的偏移量
yi表示一个大小为[h,w]的张量,表示对于原始图像中的每个点,对于kernel中的第i个元素,在y轴方向的偏移量
'''
dtype = offset.data.type()
ks = self.kernel_size
N = offset.size(1) // 2
'''
下面这段代码的整体功能:将offset中第二维度的顺序从[x1, y1, x2, y2, ...] 变成[x1, x2, .... y1, y2, ...]
'''
offsets_index = Variable(torch.cat([torch.arange(0, 2*N, 2), torch.arange(1, 2*N+1, 2)]), requires_grad=False).type_as(x).long()
# 当b=1,N=9时,offsets_index=[ 0, 2, 4, 6, 8, 10, 12, 14, 16, 1, 3, 5, 7, 9, 11, 13, 15, 17]
# offsets_index的大小为[18]
offsets_index = offsets_index.unsqueeze(dim=0).unsqueeze(dim=-1).unsqueeze(dim=-1).expand(*offset.size())
# 然后unsqueeze扩展维度,offsets_index大小为[1,18,1,1]
# expand后,offsets_index的大小为[1,18,h,w]
offset = torch.gather(offset, dim=1, index=offsets_index)
# 根据维度dim按照索引列表index将offset重新排序,得到[x1, x2, .... y1, y2, ...]这样顺序的offset
# ------------------------------------------------------------------------
# 对输入x进行padding
if self.padding:
x = self.zero_padding(x)
# p表示求偏置后,每个点的位置
p = self._get_p(offset, dtype)# (b, 2N, h, w)
p = p.contiguous().permute(0, 2, 3, 1) # (b,h,w,2N)
q_lt = Variable(p.data, requires_grad=False).floor() #floor是向下取整
q_rb = q_lt + 1 # 上取整
# +1相当于向上取整,这里为什么不用向上取整函数呢?是因为如果正好是整数的话,向上取整跟向下取整就重合了,这是我们不想看到的。
# q_lt[..., :N]代表x方向坐标,大小[b,h,w,N], clamp将值限制在0~h-1
# q_lt[..., N:]代表y方向坐标, 大小[b,h,w,N], clamp将值限制在0~w-1
# cat后,还原成原大小[b,h,w,2N]
q_lt = torch.cat([torch.clamp(q_lt[..., :N], 0, x.size(2)-1), torch.clamp(q_lt[..., N:], 0, x.size(3)-1)], dim=-1).long() # 将q_lt中的值控制在图像大小范围内 [b,h,w,2N]
q_rb = torch.cat([torch.clamp(q_rb[..., :N], 0, x.size(2)-1), torch.clamp(q_rb[..., N:], 0, x.size(3)-1)], dim=-1).long() # 将q_rt中的值控制在图像大小范围内 [b,h,w,2N]
'''
获取采样后的点周围4个方向的像素点
q_lt: left_top 左上
q_rb: right_below 右下
q_lb: left_below 左下
q_rt: right_top 右上
'''
# 获得lb
q_lb = torch.cat([q_lt[..., :N], q_rb[..., N:]], -1) # [b,h,w,2N]
# 获得rt
q_rt = torch.cat([q_rb[..., :N], q_lt[..., N:]], -1) # [b,h,w,2N]
'''
插值的时候需要考虑一下padding对原始索引的影响
p[..., :N] 采样点在x方向(h)的位置 大小[b,h,w,N]
p[..., :N].lt(self.padding) : p[..., :N]中小于padding 的元素,对应的mask为true
p[..., :N].gt(x.size(2)-1-self.padding): p[..., :N]中大于h-1-padding 的元素,对应的mask为true
p[..., N:] 采样点在y方向(w)的位置 大小[b,h,w,N]
p[..., N:].lt(self.padding) : p[..., N:]中小于padding 的元素,对应的mask为true
p[..., N:].gt(x.size(2)-1-self.padding): p[..., N:]中大于w-1-padding 的元素,对应的mask为true
cat之后,大小为[b,h,w,2N]
'''
mask = torch.cat([p[..., :N].lt(self.padding)+p[..., :N].gt(x.size(2)-1-self.padding),
p[..., N:].lt(self.padding)+p[..., N:].gt(x.size(3)-1-self.padding)], dim=-1).type_as(p) #
#mask不需要反向传播
mask = mask.detach()
#p - (p - torch.floor(p))相当于torch.floor(p)
floor_p = p - (p - torch.floor(p))
'''
mask为1的区域就是padding的区域
p*(1-mask) : mask为0的 非padding区域的p被保留
floor_p*mask: mask为1的 padding区域的floor_p被保留
'''
p = p*(1-mask) + floor_p*mask
p = torch.cat([torch.clamp(p[..., :N], 0, x.size(2)-1), torch.clamp(p[..., N:], 0, x.size(3)-1)], dim=-1)
# 双线性插值的系数 大小均为 (b, h, w, N)
g_lt = (1 + (q_lt[..., :N].type_as(p) - p[..., :N])) * (1 + (q_lt[..., N:].type_as(p) - p[..., N:]))
# (1+左上角的点x - 原始采样点x)*(1+左上角的点y - 原始采样点y)
g_rb = (1 - (q_rb[..., :N].type_as(p) - p[..., :N])) * (1 - (q_rb[..., N:].type_as(p) - p[..., N:]))
# (1-(右下角的点x - 原始采样点x))*(1-(右下角的点y - 原始采样点y))
g_lb = (1 + (q_lb[..., :N].type_as(p) - p[..., :N])) * (1 - (q_lb[..., N:].type_as(p) - p[..., N:]))
# (1+左下角的点x - 原始采样点x)*(1+左上角的点y - 原始采样点y)
g_rt = (1 - (q_rt[..., :N].type_as(p) - p[..., :N])) * (1 + (q_rt[..., N:].type_as(p) - p[..., N:]))
# (1-(右上角的点x - 原始采样点x))*(1-(右上角的点y - 原始采样点y))
# (b, c, h, w, N)
x_q_lt = self._get_x_q(x, q_lt, N) # 左上角的点在原始图片中对应的真实像素值
x_q_rb = self._get_x_q(x, q_rb, N) # 右下角的点在原始图片中对应的真实像素值
x_q_lb = self._get_x_q(x, q_lb, N) # 左下角的点在原始图片中对应的真实像素值
x_q_rt = self._get_x_q(x, q_rt, N) # 右上角的点在原始图片中对应的真实像素值
# 双线性插值算法
# x_offset : 偏移后的点再双线性插值后的值 大小(b, c, h, w, N)
x_offset = g_lt.unsqueeze(dim=1) * x_q_lt + \
g_rb.unsqueeze(dim=1) * x_q_rb + \
g_lb.unsqueeze(dim=1) * x_q_lb + \
g_rt.unsqueeze(dim=1) * x_q_rt
'''
偏置点含有九个方向的偏置,_reshape_x_offset() 把每个点9个方向的偏置转化成 3×3 的形式,
于是就可以用 3×3 stride=3 的卷积核进行 Deformable Convolution,
它等价于使用 1×1 的正常卷积核(包含了这个点9个方向的 context)对原特征直接进行卷积。
'''
x_offset = self._reshape_x_offset(x_offset, ks) #(b,c,h*ks,w*ks)
out = self.conv_kernel(x_offset)
return out
_get_p_n
- 功能:求每个点的偏置方向
#功能:求每个点的偏置方向
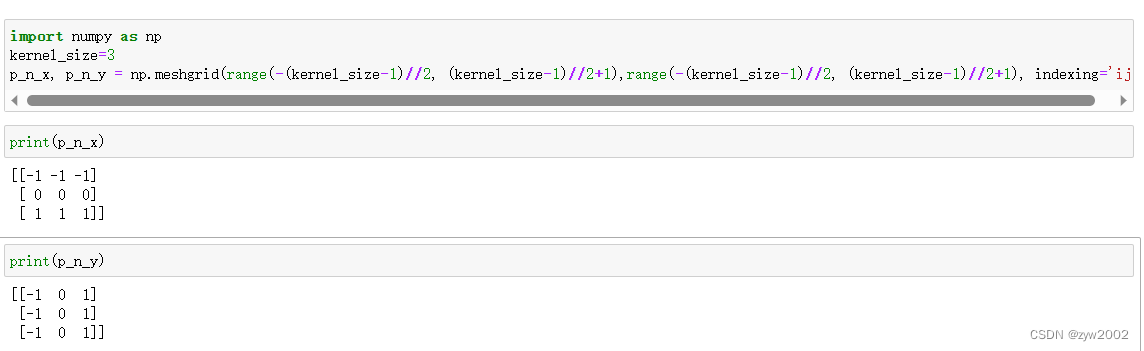
def _get_p_n(self, N, dtype):
# N=kernel_size*kernel_size
p_n_x, p_n_y = np.meshgrid(range(-(self.kernel_size-1)//2, (self.kernel_size-1)//2+1),
range(-(self.kernel_size-1)//2, (self.kernel_size-1)//2+1), indexing='ij')
# (2N, 1)
p_n = np.concatenate((p_n_x.flatten(), p_n_y.flatten()))
p_n = np.reshape(p_n, (1, 2*N, 1, 1))
p_n = Variable(torch.from_numpy(p_n).type(dtype), requires_grad=False)
return p_n # [1,2*N,1,1]
meshgrid后,p_n_x和p_n_y的值为
flatten后,p_n_x和p_n_y的值为

concatenate后,p_n的值为

reshape,p_n的值为:
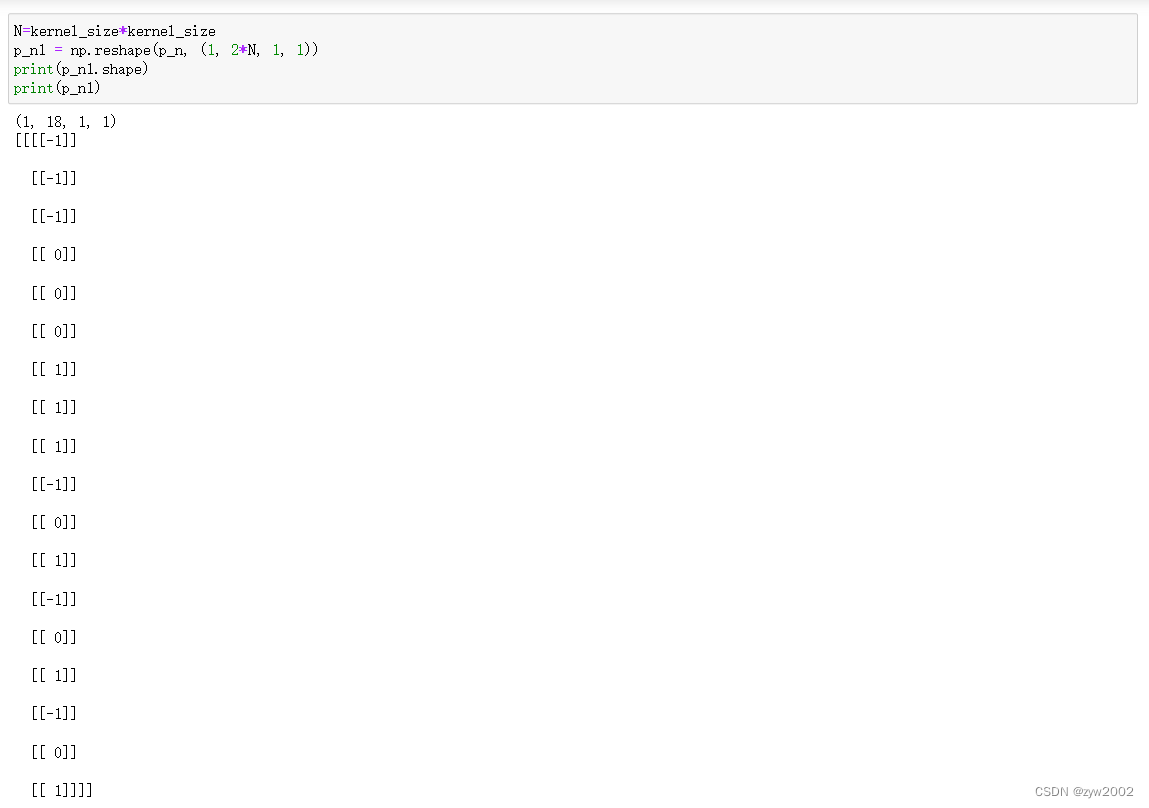
当kernel_size=3时,N=3*3=9 , p_n的大小是[1,18,1,1] (即[1,2*N,1,1])
其中在第二个维度,排列的顺序是·(x1,x2,…,x9,y1,y2,…y9) 。其中xi,yi分别表示kernel中的第i个元素相对于中心点在x方向和y方向的偏移量。
_get_p_0
- 功能: 求每个点的坐标
@staticmethod
#功能:求每个点的坐标
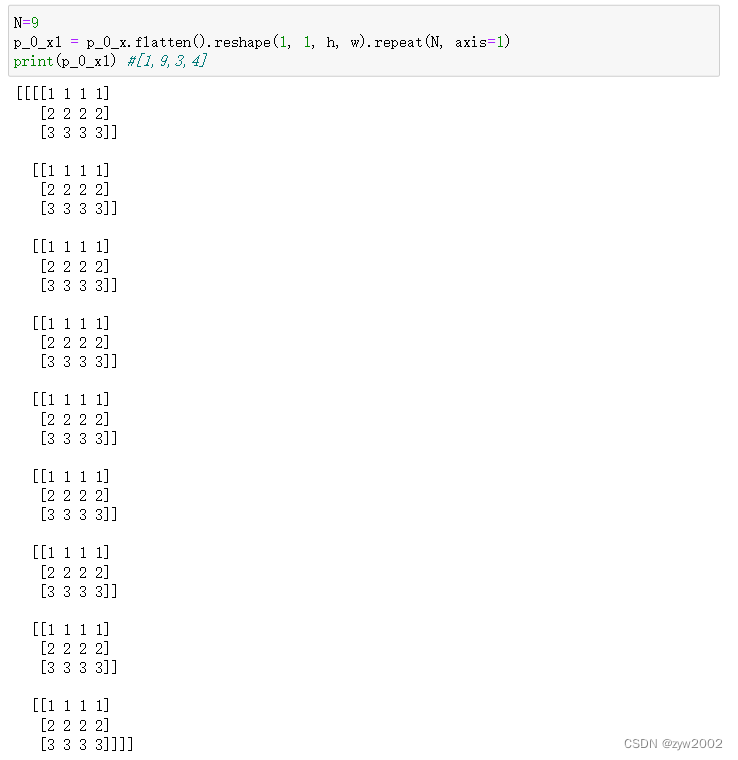
def _get_p_0(h, w, N, dtype):
p_0_x, p_0_y = np.meshgrid(range(1, h+1), range(1, w+1), indexing='ij')
p_0_x = p_0_x.flatten().reshape(1, 1, h, w).repeat(N, axis=1) # (1,N,1,1)
p_0_y = p_0_y.flatten().reshape(1, 1, h, w).repeat(N, axis=1) # (1,N,1,1)
p_0 = np.concatenate((p_0_x, p_0_y), axis=1)
p_0 = Variable(torch.from_numpy(p_0).type(dtype), requires_grad=False)
return p_0 # (1,2*N,1,1)
假设h=3, w=4
meshgrid后,p_0_x, p_0_y的值为
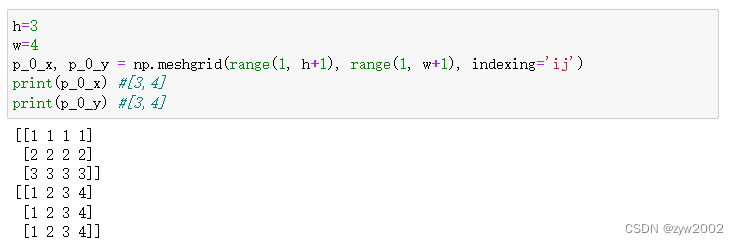
p_0_x,p_0_y的大小均为[h,w]
flatten后,大小变成[h*w]
reshape后,大小变成[1,1,h,w]
repeat后大小变为[1,9,3,4]
p_0_x的值为:
p_0_y的值为:
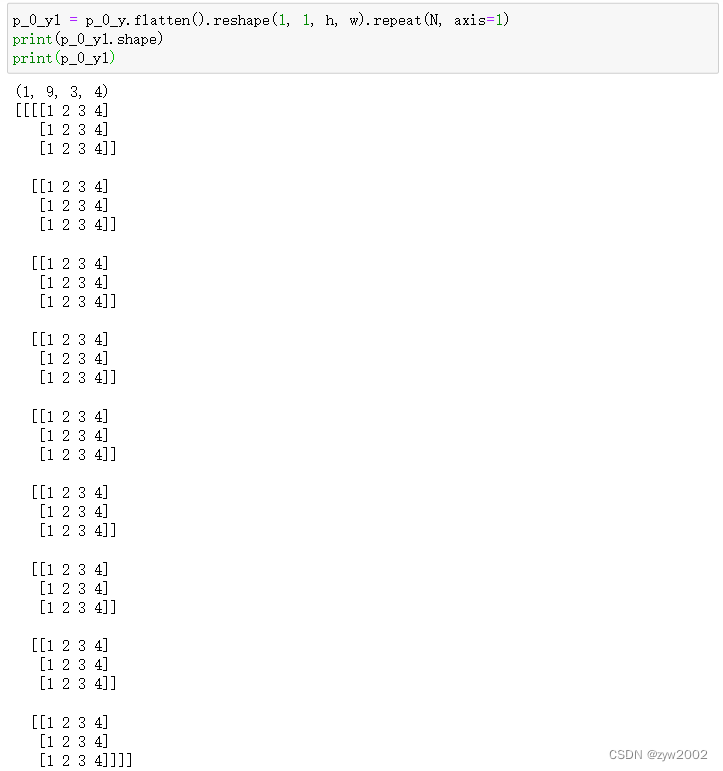
把p_0_x和p_0_y在dim=1上concatenate后,p_0的大小为[1,18,3,4] , 即[b,2*N,h,w]
_get_p
功能:求最后的偏置后的点的位置 = 每个点的坐标(p_0)+偏置方向(p_n)+偏置(offset)
#求最后的偏置后的点=每个点的坐标+偏置方向+偏置
def _get_p(self, offset, dtype):
'''
offset: 每个像素点的偏移 [b,2*N,h,w]
N:kernel中元素的个数 = k*k
offset 和 x的宽高相同,表示的是对应位置像素点的偏移
offset 的第二个维度大小是2N, 当N=9时,排列顺序是(x1, y1, x2, y2, ...x18,y18)
xi表示一个大小为[h,w]的张量,表示对于原始图像中的每个点,对于kernel中的第i个元素,在x轴方向的偏移量
yi表示一个大小为[h,w]的张量,表示对于原始图像中的每个点,对于kernel中的第i个元素,在y轴方向的偏移量
'''
N, h, w = offset.size(1)//2, offset.size(2), offset.size(3)
p_n = self._get_p_n(N, dtype) # 偏置方向:(1, 2N, 1, 1)
p_0 = self._get_p_0(h, w, N, dtype) # 每个点的坐标:(1, 2N, h, w)
p = p_0 + p_n + offset # 最终点的位置
return p # (1,2N,h,w)
_get_x_q
- 功能: 求采样点周围4个点在原始图像中对应的真实像素值
#求出p点周围四个点的像素
def _get_x_q(self, x, q, N):
# x:[b,c,h',w']
# q:[b,h,w,2N]
# q可能为q_lt,q_rt,q_lb,q_rb
b, h, w, _ = q.size()
padded_w = x.size(3) # w'
c = x.size(1)
x = x.contiguous().view(b, c, -1) # (b, c, h*w)
# 将图片压缩到1维,方便后面的按照index索引提取
# q[...,:N] (b,h,w,N) 原始图像中(h_i,w_j)的点在偏移后,向左上角取整对应的点,在N个区域中,x方向的偏移量
# q[...,:N] (b,h,w,N) 原始图像中(h_i,w_j)的点在偏移后,向左上角取整对应的点,在N个区域中,y方向的偏移量
# index: (b,h,w,N) 原始图像中(h_i,w_j)的点在偏移后,向左上角取整对应的点,在N个区域中,x*w + y
index = q[..., :N]*padded_w + q[..., N:] # 大小(b, h, w, N)
# 这个目的就是将index索引均匀扩增到图片一样的h*w大小
index = index.contiguous().unsqueeze(dim=1).expand(-1, c, -1, -1, -1).contiguous().view(b, c, -1)
'''
unsqueeze后 (b,1,h,w,N)
expand后 (b,c,h,w,N)
view后 (b, c, h*w*N) 其中每一个值对应一个index
'''
#双线性插值法就是4个点再乘以对应与 p 点的距离。获得偏置点 p 的值,这个 p 点是 9 个方向的偏置所以最后的 x_offset 是 b×c×h×w×9。
x_offset = x.gather(dim=-1, index=index).contiguous().view(b, c, h, w, N)
# x :(b,c,h*w)
# gather后: (b,c,h*w*N)
# view后:(b,c,h,w,N)
return x_offset #(b,c,h,w,N) 左上角的点在原始图像中对应的像素值
_reshape_x_offset()
- 功能:每个点9个方向的偏置转化成 3×3 的形式
#_reshape_x_offset() 把每个点9个方向的偏置转化成 3×3 的形式
@staticmethod
def _reshape_x_offset(x_offset, ks):
# x_offset : (b, c, h, w, N)
# ks: kernel_size
# N=ks*ks
b, c, h, w, N = x_offset.size()
'''
当ks=3,N=9时:
s=0 [...,0:3] (b,c,h,w,3)->(b,c,h,w*3)
s=3 [...,3:6] (b,c,h,w,3)->(b,c,h,w*3)
s=6 [...,6:9] (b,c,h,w,3)->(b,c,h,w*3)
cat 后 (b,c,h,w*9)
view 后(b,c,h*3,w*3)
'''
x_offset = torch.cat([x_offset[..., s:s+ks].contiguous().view(b, c, h, w*ks) for s in range(0, N, ks)], dim=-1)
x_offset = x_offset.contiguous().view(b, c, h*ks, w*ks) # (b,c,h*3,w*3)
return x_offset #(b,c,h*ks,w*ks)