阅读工具:source insight
技术交流:[email protected]
源码版本:Firmware(原生固件)
最近在做光流相关位置控制,买了光流,QCG读取数据,数据有,但是起飞后无法切换到Posctl.被迫读了一段与光流相关的飞行模式,和控制的程序流,以下是阅读过程,如有不对欢迎指正,欢迎交流。
不会写博客偷懒截图了,如有需求可以索要word版
陈哥把我的思路整理了一下,配合阅读效果更佳!(2016.8.27)
http://blog.csdn.net/czyv587/article/details/51777392
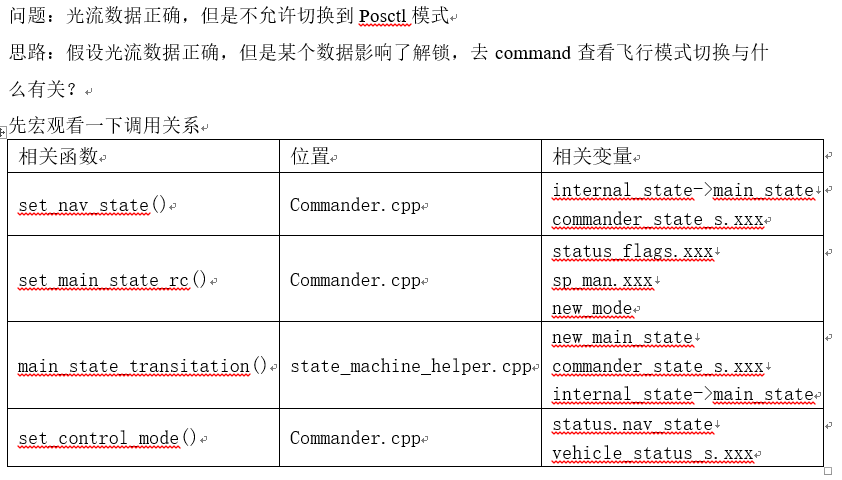
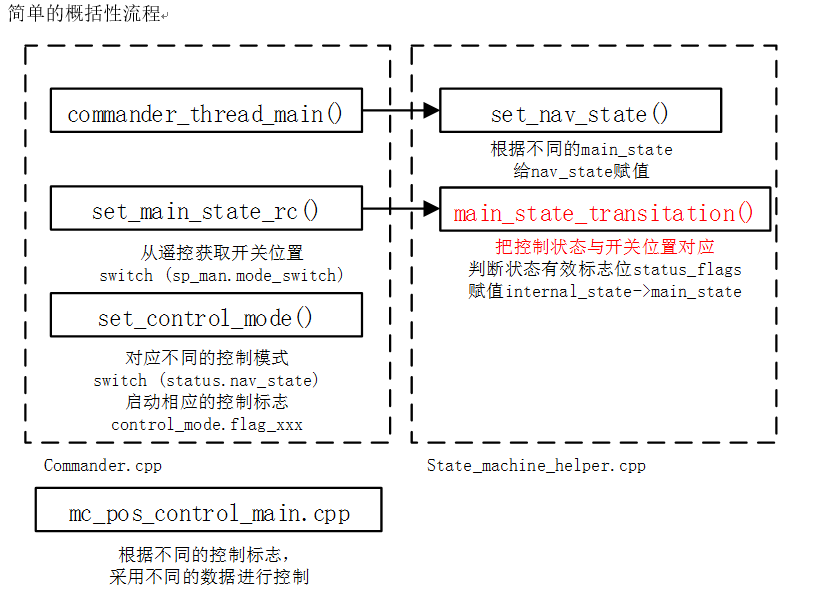
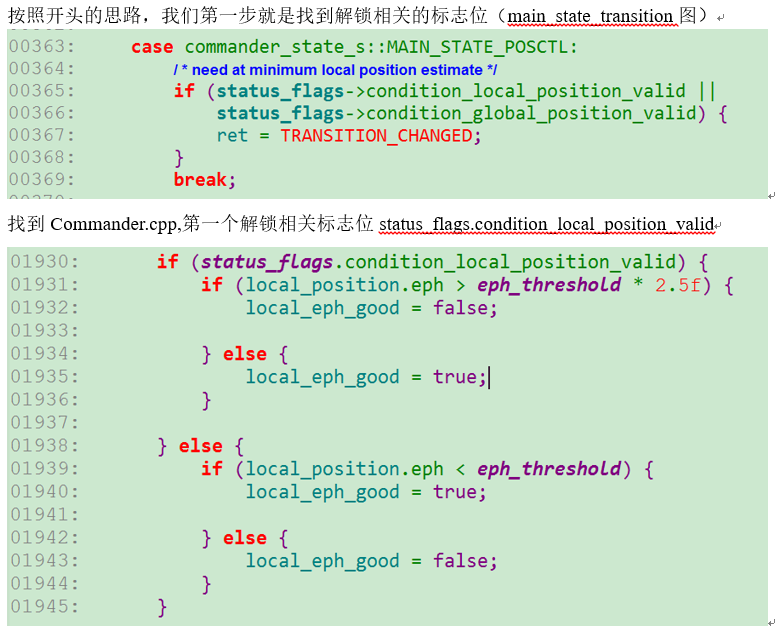
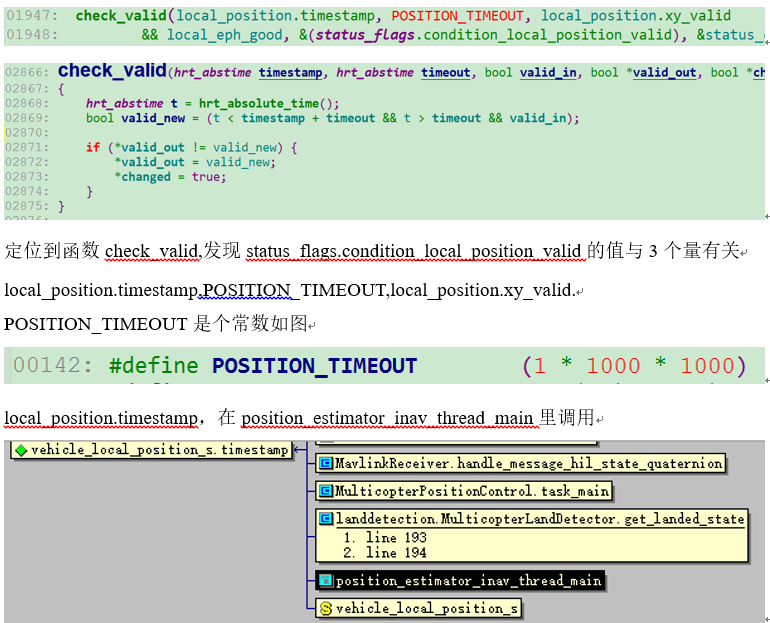
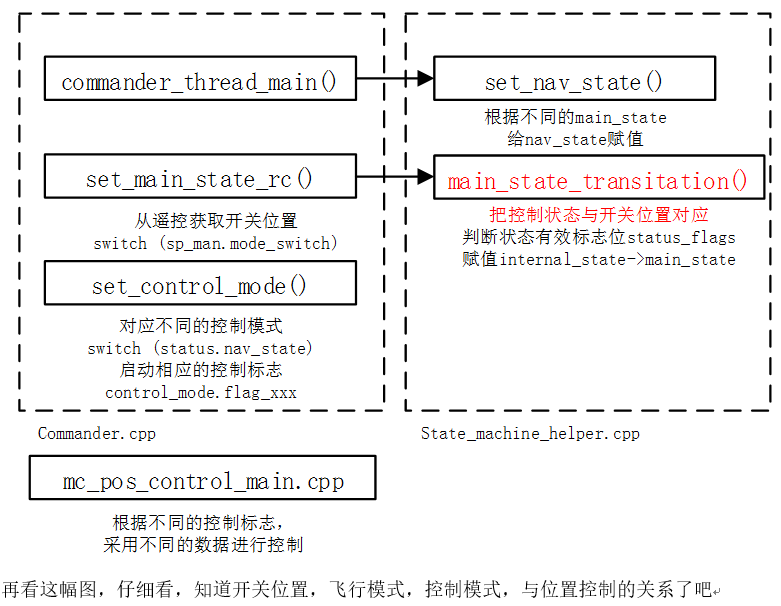
有了这个大致流程就比较清晰了,看上去很简单,但是我找了好久才把飞行模式切换定位到Commander.cpp里的,又在里面看了很久才有那么一丝头绪,都是眼泪。既然有的逻辑我们就按顺序整理一下。



[源码解读]commander 飞行模式,控制模式
猜你喜欢
转载自blog.csdn.net/zinghd/article/details/51720792
今日推荐
周排行