(一)Dijkstra-Prim 算法和 Kruskal 算法
Dijkstra-Prim算法基本思路:所有节点分成两个group,一个为已经选取的selected_node(为list类型),一个为candidate_node,首先任取一个节点加入到selected_node,然后遍历头节点在selected_node,尾节点在candidate_node的边,选取符合这个条件的边里面权重最小的边,加入到最小生成树,选出的边的尾节点加入到selected_node,并从candidate_node删除。直到candidate_node中没有备选节点(这个循环条件要求所有节点都有边连接,即边数要大于等于节点数-1,循环开始前要加入这个条件判断,否则可能会有节点一直在candidate中,导致死循环)。
Kruskal算法基本思路:先对边按权重从小到大排序,先选取权重最小的一条边,如果该边的两个节点均为不同的分量,则加入到最小生成树,否则计算下一条边,直到遍历完所有的边。
分别用
Dijkstra-Prim
算法和
Kruskal
算法,在下图中找到一棵最小长度的
生成树。

Dijkstra-Prim 算法 :
Kruskal 算法:
标答: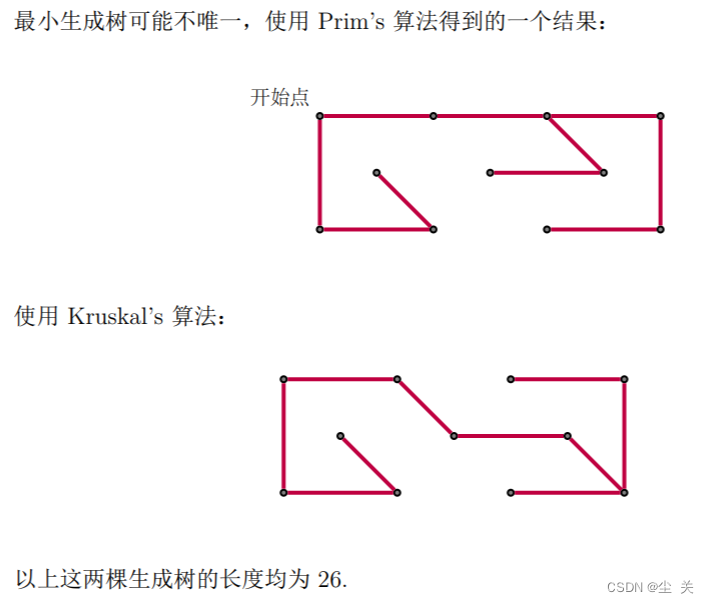
(二)图搜索算法
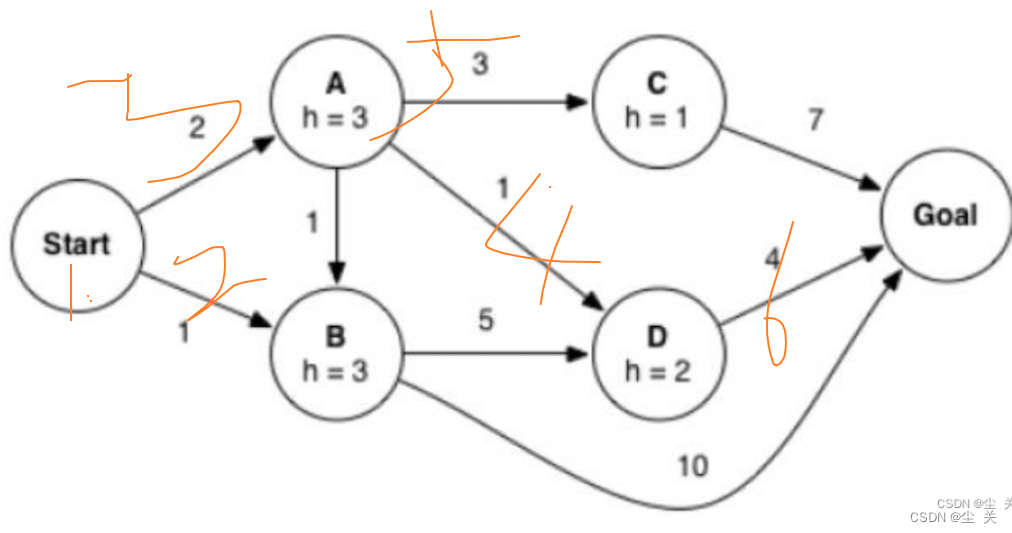
考虑以下状态图,边上的数字是路径成本。在相同节点扩展条件下,选择节点扩展遵循字母顺序(
例如
S->X->A
应在
S->X->B
之前被扩展,
S->A->Z
应在
S->B->A 之前被扩展)
。

1
) 请用基于成本的统一搜索算法,给出状态被扩展的顺序是什么?返回的路径是 什么?
2
) 考虑在上面的图中进行
A*
图搜索。行动成本和启发信息值都已在图中标出。 请给出状态被扩展的顺序是什么?返回的路径是什么?
答:
1)应用基于成本的统一搜索,状态节点被扩展的顺序是:start,B,A,D,C,Goal. 返回的路 径是:Start-A-D-Goal。
2)使用 A* 图搜索算法,状态被扩展的顺序是:Start,B,A,D,C,Goal. 返回的路径是: Start-A-D-Goal。
扫描二维码关注公众号,回复:
16226538 查看本文章

扩展顺序如图: