S1机器人评测报告
最近入手了一款Orbbot S1机器人,这是一款以3D视觉硬件及软件算法为基础的移动机器人开发平台。在下面,我将分为几个部分给大家展示我们这次的评测结果。

Orbbot S1机器人外观实拍图
外观
在外观上它由一个装有铝合金麦轮的金属箱型车身,车身的数字舵机上还装载有四自由度机械臂和柔性机械爪。此外还有两根固定用的金属杆和角度调节支座上奥比中光的Astra Pro深度相机。值得一提的是机身的两侧各有一条蓝色灯带,在测试体验时单调的黑色车身上的两条蓝色灯带直接增加了产品的科技感。简单组装完成后我们直接开始了其性能的测试。
开机体验
在完成客户端与机器人通过机器人自带热点连接后,确定机器人能正常对发出的指令做出相应的动作。我们再根据3D视觉开发者社区提供的开发手册,将测试内容分成几个板块:基础3D视觉应用、人体姿态控制功能、SLAM建图与导航课程、利用机械臂实现物块抓取。
Orbbot S1机器人实验手册
开始实验
在机器人基础3D视觉应用端我们首先对该机器人的线条和色块的识别和追踪功能进行了测试,并用OpenCV视觉实现KCF算法。得益于深度摄像头的高精度取景测量,机器人在该项性能上对待识别物的识别率高。在巡线任务、自动化生产线、质量检测、物料搬运等场景能有所发挥。其后我们测试了深度相机对环境点云图的配置。最终得到的点云图具有丰富的几何形状和尺度信息,易受光照强度变化影响,多数情况下能够稳定得到周围环境的 3D点云信息。在三维建模设计、自动驾驶、医学成像等方面具有较多的应用前景。
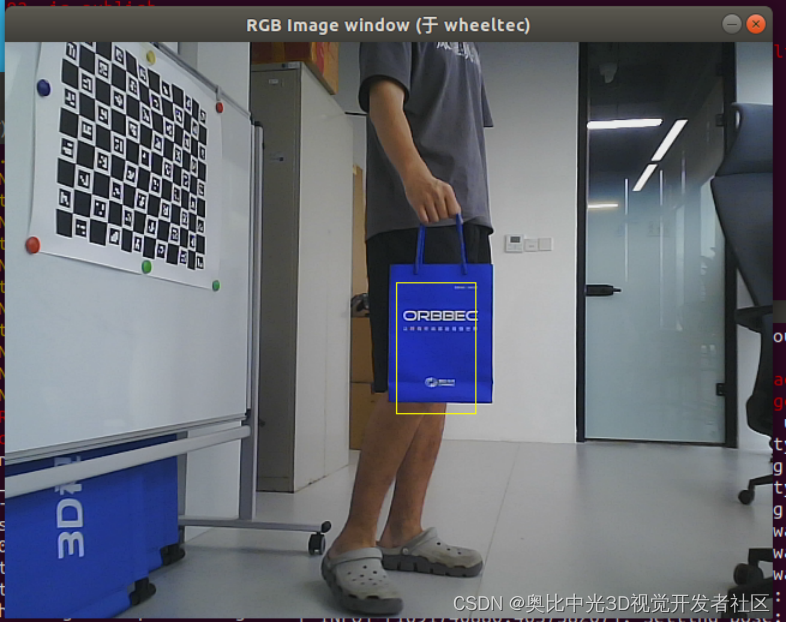
KCF算法追踪物体
KCF算法物体跟踪
另外由于我们对开发手册中3D视觉实现人体姿态控制应用也有一定兴趣,所以我们特别测试了利用人体骨架的识别控制机器人及利用3d视觉实现人体跟踪等性能。通过叉腰进行功能标定后能够进行抬左、右脚,伸左、右手的动作控制小车姿态和语音交互功能,且该功能反应灵敏,客户端的图像处理在长时间使用中会出现延迟,但不影响小车的精准识别骨架并做出反应。在测试人体跟踪时我们发现,小车在0.5m~2m的范围内能对跟踪对象做到精准识别并追踪。此外,在远距离人体识别精度和抗环境光干扰方面存在改良空间。
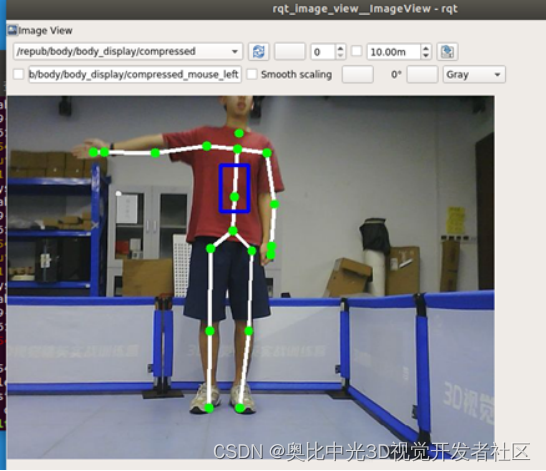
骨架算法识别人体
录屏- 骨架跟随

在SLAM建图与导航课程性能的实验测试中机器人能够准确地感知外界环境,实现SLAM建图导航和路径规划并保存地图。实验引导中介绍说是通过深度相机视觉与激光雷达进行融合建图与路径导航。在该性能的体验上,小车第一次运行时出现扫描得到的二维/三维图出现一定的形变,后面降低小车速度进行扫描能够得到更家精确的图像,因此在用户运行这一功能时,适当降低小车速度以保证建图精确度。且小车利用深度相机数据加强了对异形物体的识别率,在避障测试中得到理想的结果。
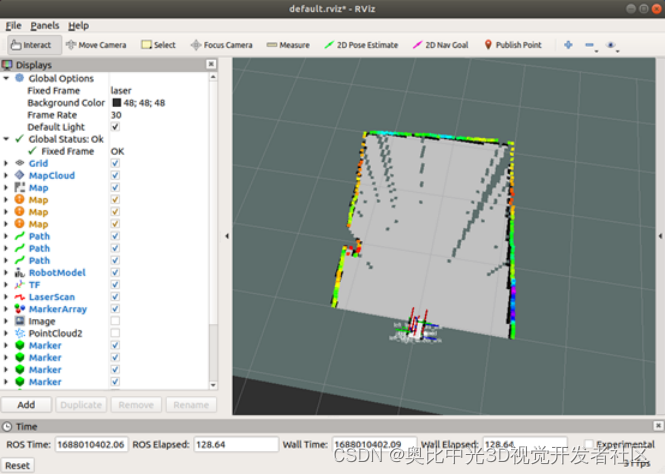
2D建图
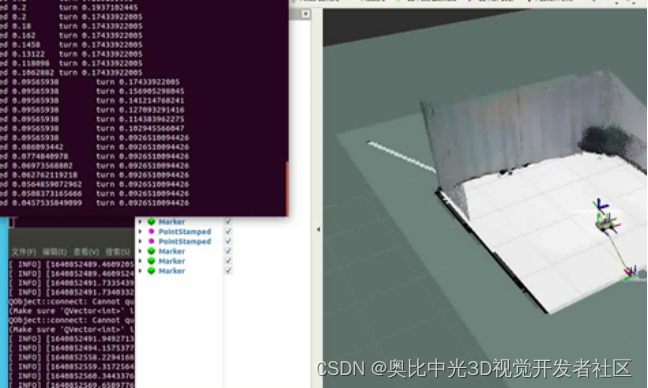
3D建图
再是利用机械臂实现物块抓取,我们在小车视野内放上物块后,小车会自主识别、调整到达需要的位置,并对物块进行抓取,完成后小车能够自主巡航到特定位置放下物块。经过我们的多次测试,小车能够抓取多种不规则物体,柔性机械爪能够为小车的抓取功能提供更多的稳定性。
巡线行驶
物块夹取
一些注意事项
我们在测试过程中时常出现运行中小车的出现延迟增加的情况,猜测原因为电量限制。小车电压显示11.0V以上时基本能做到快速反应,而电压在10.5V以下会错误率会渐渐增加。所幸小车支持接通电源时正常运作。希望在后续开发中能够加强硬件性能,保证机器人更长的持续使用时间。

S1小车电压显示
另外,我们跟进着该产品的后续开发方向的资讯,开发团队正在对机器人的深度学习推进开发工作,产品在后续的更新中将学会深度学习手势识别、沙盘交通识别和基础物理识别等。
购买建议
最后关于购入建议:这机器人能精准而迅速地做出指令的复杂动作,而作为一个开发平台,我们还可以通过ROS机器人系统进行二次开发,加入开发者独创的设计能利用深度摄像头和机械臂的性能开发出能应用于各种竞赛场景的机器人。想要通过ROS机器人系统对机器人完成开发的用户可以在这个平台得到好的体验可以依照自己的能力入手。
以上内容为站在普通消费者角度的评测内容,总的来说Orbbot S1是一款具有多种功能并在开发者手中能进行二次创作的平台,未来可期。