作者:师云雷-许三多
链接:https://www.zhihu.com/question/25809337/answer/61561896
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
机器人路线图报告解读-医疗机器人
一、 美国机器人路线图医疗机器人研究
美国学术与工业界对机器人的研究向来从解决实际问题出发,2016年美国机器人发展路线图第四章:Health, Independence and Quality of Life更是直接从社会需求端切入,指出对医疗机器人的需求是生活健康、生活独立和提高生活品质,这也是研究医疗机器人的意义所在。更具体来说,医疗机器人的研究动因是为了降低社会成本(减少医疗保健费用),方法主要归结为两类:1-拓展医疗和治疗的渠道;2-优化疾病预防和患者康复。最终可以实现延长美国社会劳动者的劳动时间以及提高劳动者的生产率,扩大劳动力规模,降低医疗保健费用,对冲美国社会老龄化造成的劳动力减少和医疗费用增加。
美国机器人发展路线图中提到的医疗机器人是一个非常广义的概念,这个医疗机器人定义包含了1、看护机器人(监控并服务老人/患者);2、手术和介入机器人(直接参与手术操作);3、假肢机器人(机械手/臂/外骨骼)、康复机器人和社会辅助机器人(行为治疗);4、临床辅助机器人(运输/清理/教育/远程诊治);路线图中对于每种机器人都针对性的对其应用场景、功能和发展路线进行了分析。
1、 看护机器人。
路线图中4.2.Aging and Quality of Life Improvement方向主要针对看护机器人的场景进行描述:社会老龄化日益严重,为了最大化提高生活水平而又降低看护费用,认为老年人能够在家得到医疗服务是比较合适的方案,而看护机器人是一个很好的选择。
<img src="https://pic4.zhimg.com/v2-8371440d75df0f102320cd841540fd57_b.png" data-rawwidth="1676" data-rawheight="695" class="origin_image zh-lightbox-thumb" width="1676" data-original="https://pic4.zhimg.com/v2-8371440d75df0f102320cd841540fd57_r.jpg">
弗劳恩霍夫研究所的Care-O-bot 4看护机器人
看护机器人的主要功能如下:
- 协助主人完成一些常用的家务工作;
- 主人的药物管理;
- 主人的健康管理;
- 主人的康复管理;
- 主人与外界沟通;
其研究的关键技术和挑战在于让机器人理解人类的(细微)行为和社会交往模式,之后才能让机器人匹配自己的角色例如顾问、治疗师、好朋友或者看护者,从而让机器人选择不同的交往策略。另外机器人需要适应在人类群体中的规则,扮演好自己的角色。
其中针对老年人的一个重要研究方向是建立和维持长期关系的能力,机器人需要实现短期交互乃至数周和数月内保持上面提到的交互能力,使机器人的行为适应用户健康状态的变化,响应不同的行为策略。对机器人这些能力的研究将确定机器人在与用户的交互中有多少自主性,即机器人仅仅可以充当患者和治疗师之间的接口,或者可以充当治疗师。
开发低成本的并且具有远程物理操作能力的机器人也是一个挑战,需要研究远程操作机器人如何确定自动、半自动或者遥控的级别设定,并且保证最终用户使用直观舒适。开发的关键在于坚持以人为中心的设计过程并且要保证严格测试。
在5年内
- 机器人将根据人类社会沟通的适当规范,在特定的、狭义的领域中自主地维持一次性(例如健康面谈)或短期(例如特定练习)的交互,交互内容包括社交距离、姿势/手势、表情和其他非语言提示以及简单的言语内容,对指令的反馈。
10年内
- 在受控环境中,机器人将在更广泛的领域中自主地维持更长时间的重复交互。
- 机器人将在有限的领域中使用包括语音,手势和注视行为的开放式对话,提供人类领导和机器人领导交互的组合。
- 他们将能够在指定的精确领域内提供规定的干预/治疗。
15年内
- 机器人将在一系列广泛的域中自主维护数周和数月的多次互动。这些机器人将提供复杂的混合主动的互动,并流利地使用多模式的行为,可以泛化的社会情境。
- 机器人将适应人类的行为随时间的变化,包括情绪的小波动、缓慢下降或改善、突然意外的变化,并塑造互动,以匹配个人用户的角色和需要。
2、 手术和介入机器人。
路线图中4.3. Surgical and Interventional Robotics描述了微创伤手术机器人的使用场景:术前诊断并建模,术前进行模拟手术,医生在术中感觉自己在患者体内操作手术器械,最终完美的去除所有的癌症组织,患者术后即可出院。
<img src="https://pic3.zhimg.com/v2-c075e0c3fc37575595a139c131c9f6aa_b.jpg" data-rawwidth="5475" data-rawheight="3675" class="origin_image zh-lightbox-thumb" width="5475" data-original="https://pic3.zhimg.com/v2-c075e0c3fc37575595a139c131c9f6aa_r.jpg">
美国直觉外科公司的da Vinci Xi 手术机器人
手术机器人的研究驱动主要是通过将信息耦合到手术室或介入手术室来提高医疗程序的有效性,并且在执行手术和其他介入手术时超越人的身体限制(但同时仍然提供人工对医疗程序的控制)。
目前手术中使用的机器人一般在外科医生的直接控制下(并且人与机器人交互接口有限),通常在远程操作中人类操作者操纵主输入装置,并且患者端机器人跟随主输入,其功能与优点如下:
- 与传统的微创外科手术相比机器人末端更加灵活;
- 可以缩放将操作者的运动;
- 在操作者和手术器械尖端之间提供非常直观的操作;
- 外科医生可获得与开放手术相同的精度或更好的精度实现手术切割、烧灼和缝合;
- 包含实时成像装置,在手术期间可视化手术区域;
- 下一代手术工作站(手术机器人)将提供各种各样的计算机和物理增强,例如围绕精细的解剖结构的“禁飞区”,可以在外科医生的视野中放置大量相关数据,以及手术中识别运动和患者状态,以评估性能和预测手术结果。
另外在骨科机器人和介入机器人中“外科CAD / CAM”更具有发展前景,未来机器人将提出手术方案和路径,人类只需要批准手术并监督手术过程。
<img src="https://pic2.zhimg.com/v2-407658d6d1176d2664869ed17407eec9_b.jpg" data-rawwidth="1024" data-rawheight="474" class="origin_image zh-lightbox-thumb" width="1024" data-original="https://pic2.zhimg.com/v2-407658d6d1176d2664869ed17407eec9_r.jpg">
MAKO Surgical 公司的RIO Robotic系统
手术机器人的关键研究技术和研究方向如下:
- 建模人类行为和动态;
- 在非常大量的维度上感知人的身体行为;
- 高灵巧的手术机器人,可以通过身体内腔和组织平面移动,以尽量减少附带组织损伤;
- 识别末端执行器和可变形结构/组织之间的接近度和相对方向;
- 直观的接口,用于物理交互人类和机器人;
- 组织建模和表征;
- 内窥镜操纵和目标对准控制;
- 保持手术器械在可变形/不可变形组织之间的3D空间实时配准;
在5年内,手术机器人将实现:
- 新的设备和算法,使人类和机器人之间的信息和能量实现更有效的双向交流;
- 集成实时传感器和数据库信息的控制接口和导航系统;
- 对外科医生的全套物理反馈,保证医生远程控制机器人时对患者组织的环境顺应性;
- 设计机器人行为,确保无论人类做什么都能得到机器人适当的互动;
- 可靠性管理;
在10年内,手术机器人将实现:
- 直观,透明的人机交互
- 人机接口将估计用户的意图,而不是简单地执行可能错误/有缺陷的命令
在15年内,手术机器人将实现:
- 感知人的运动和推断操作者的意图;
- 算法开发以向操作者提供适当的力反馈;
3、 假肢机器人(机械手/臂/外骨骼)、康复机器人和社会辅助机器人(行为治疗)。
假肢机器人代替人体的部分功能,通常是功能丢失/损伤或者先天缺陷;康复机器人和社会辅助机器人用于解决患者康复动作的标准性和对患者康复要求的遵守。
穿戴式矫正器和假体装置(假肢机器人)通过有限的运动/控制物理地辅助肢体,或通过替换丢失或截肢的肢体来增加功能或提高舒适度。这样的设备越来越多地结合机器人特征和神经控制。其主要功能如下:
- 机器人矫正器通常以外骨骼的形式设计,允许肢体自由运动,同时提供所需的支撑。
- 假肢机器人通过将机械装置与人的肌肉、骨骼和神经系统融合来代替身体部分的功能。
大多数现有的机器人外骨骼是研究装置,集中于军事应用(例如,允许士兵在跑步时在其背部携带非常重的负载)和临床中的康复。
<img src="https://pic3.zhimg.com/v2-c7041f8480a69485b853de1fb8e245de_b.jpg" data-rawwidth="397" data-rawheight="541" class="content_image" width="397">
以色列ReWalk公司的REWALK PERSONAL 6.0系统
现有的商用假肢装置的能力非常有限,通常仅允许打开/关闭夹具。机器人假体装置旨在通过复制许多关节和肢体段(例如人手的22自由度)和无缝神经整合来更完全地模拟缺失的肢体或其他身体部分,其提供肢体的直观控制以及触摸反馈给佩戴者。最近几年在基础技术和神经科学方面取得了巨大进步,将提高假肢的先进性。更深入的机器人研究将会大大提高功能和降低假体的成本。
<img src="https://pic2.zhimg.com/v2-a2d9b1e3b87a42649c636fd0e504dd91_b.png" data-rawwidth="412" data-rawheight="615" class="content_image" width="412">
iWalk公司的emPOWER系统
康复机器人用于患有神经肌肉损伤或疾病的患者,利用人类神经肌肉系统使用依赖的可塑性,重建人体运动功能。康复机器人基于患者的实时响应提供许多不同形式的机械输入,例如辅助、抵抗、扰动和拉伸;
作为对康复师的替代,机器人具有用于治疗的几个关键优点:
- 设置后,机器人可以提供一致、长期和个性化治疗而不疲劳;
- 使用传感器,机器人可以获取数据,提供客观的恢复量化;;
- 机器人可以执行人类治疗师不可能的治疗练习。
康复机器人的一个重要研究方向是机器人可以帮助神经科学家更深入的了解大脑功能,通过对患者基于机器人的扰动和对大脑特定区域损伤的患者的响应的量化,机器人可以做出精确的刺激反应记录。为了优化自动化康复治疗,需要开发机器人和实验来阐明外部机械力和神经可塑性之间的关系。这些关系的理解也将使神经科学家和神经科医生洞察大脑功能,有助于这些领域的基础研究。康复机器人的另一个重要研究方向是了解用户的状态和行为以适当地做出反应,自动感知需要多个传感器融合技术,基础机械模型研究仍处于初期阶段。
社会辅助机器人(SAR)主要用于康复和管理行为治疗,以适当的频率和正确性维持的身体和/认知锻炼。社会辅助机器人(SAR)从可穿戴传感器、照相机感知用户活动,机器适当地鼓励、激励和指导持续恢复锻炼,已被证明有希望为儿童、老年人、中风患者和其他需要个性化护理的人群提供治疗。
社会辅助机器人的研究方向之一是人机交互工程,涉及健康科学、心理学、社会科学和认知科学交叉,是一个不断深入的研究领域。 有效的社会辅助机器人必须理解并与环境互动,展示社会行为,将注意力和沟通集中在用户身上,与用户保持联系,从而实现特定的辅助目标。另外一个研究方向及挑战是赋予机器人同理心和感情,并且可以表达出来。
<img src="https://pic1.zhimg.com/v2-f11772579beb5c581c47d946fd52d194_b.jpg" data-rawwidth="1356" data-rawheight="668" class="origin_image zh-lightbox-thumb" width="1356" data-original="https://pic1.zhimg.com/v2-f11772579beb5c581c47d946fd52d194_r.jpg">
日本Paro小海豹机器人
4、 临床辅助机器人。
机器人可以帮助医疗人员的减少脑力和体力的工作量。例如支持病人转院,机器人帮助临床医生抬起病人,自主车辆可以运输患者,或遥控操作清除高度传染性的废物。另外机器人可以用以医疗教育,比如患者机器人模拟,而远程机诊疗机器人可以扩展咨询和治疗范围。
<img src="https://pic1.zhimg.com/v2-7e4066c720b7d04698346226b7214ac0_b.jpg" data-rawwidth="441" data-rawheight="590" class="origin_image zh-lightbox-thumb" width="441" data-original="https://pic1.zhimg.com/v2-7e4066c720b7d04698346226b7214ac0_r.jpg">
美国iRobot公司的RP-VITA 临床辅助机器人
临床辅助机器人应用最大的挑战是:在医疗保健设置机器人是对现有环境的冲突,这将以不可预见的方式改变临床工作流程,每个护理设置是完全不同的,加剧了在卫生系统内部署机器人的技术挑战。因此在这个方向进行广泛而深入的研究是必要的。另一个挑战是劳动力本身,临床医生技术素养水平很低,设计不当的机器人技术会导致经费和生命的损失。因此公司需要提供广泛的职业培训,以确保临床人员能够安全地使用机器人。临床工作者非常忙碌、混乱,会让机器人都处于高度动态的环境中,机器人很难知道什么时候和如何干预,特别是在重症监护设置。这给机器人技术带来了很多无法预见的技术挑战。
<img src="https://pic3.zhimg.com/v2-94bb1b19a173979c06f04c2af8060b1e_b.jpg" data-rawwidth="626" data-rawheight="487" class="origin_image zh-lightbox-thumb" width="626" data-original="https://pic3.zhimg.com/v2-94bb1b19a173979c06f04c2af8060b1e_r.jpg">
日本Robear看护机器人
在5年内,临床辅助机器人将实现
- 能够完成定义明确的任务(如:输送用品,清除废物和管理药物)。
- 远程机器人将用于远程精神病学,远程皮肤病学和远程保健,用于农村卫生、家庭健康和印度保健服务。
10年内,临床辅助机器人将实现
- 支持临床医生进行危险的操作任务,包括:病人转移(床到椅子)和高度传染性疾病护理(如埃博拉病毒);
- 富有表现力的交互式“智能”机器人患者模拟器将为新的临床医生提供培训;
15年内,床辅助机器人将实现
- 作为手机无缝集成到临床工作流程中。为临床医生提供行政护理任务的认知支持,例如安排检查和将患者带到医生处,帮助临床医生安排患者访视日程表。
二、 国内现状及采取的对策及思考
1、 国内研究现状
医疗机器人的主要目的是解决国民的健康和生活水平问题,相对于美国我国的老龄化问题要严峻得多;但是我国的医疗机器人水平在各个方面都与国外先进水平有较大差距。
在看护机器人方面,世界各国差距不大,目前没有得到市场认可的产品。在技术方面日本具有领先优势,其次是欧盟。我国目前有一些初创公司的产品稍微涉及医疗看护机器人方向,例如广州映博智能科技有限公司的PadBot U系列机器人、上海有个机器人有限公司等,但是目前研究主要集中在导航定位等基础功能,在路线图中提到的理解人类的(细微)行为和社会交往模式方面研究的基本空白。中科大的“佳佳”机器人在人机交互体验方面有较深入的研究,比如从善良、勤恳和智慧三个品格方面来设计机器人的外形和性格;另外中科大“可佳”机器人在智能技术方面也有长期的积累。
<img src="https://pic2.zhimg.com/v2-8b5827384e2a2f022dbf07d554e3f27d_b.jpg" data-rawwidth="500" data-rawheight="374" class="origin_image zh-lightbox-thumb" width="500" data-original="https://pic2.zhimg.com/v2-8b5827384e2a2f022dbf07d554e3f27d_r.jpg">
中科大“佳佳”服务机器人
在手术和介入机器人方面,美国大大领先世界各国。1996年intuitive surgical公司成立,3年后推出da Vinci一代产品。 而2007年我国才由天津大学和哈尔滨工业大学启动微创手术机器人的研究;又过了十年之后,intuitive surgical已经发布了第四代da Vinci Si系列,并且在2014年将da Vinci SP(单孔)手术机器人推进临床,而到2017年2月,我国尚无任何一家机构将腹腔微创手术机器人推进至临床阶段。目前天津大学与山东威高集团合作、哈尔滨工业大学与博实股份合作,均在推进腹腔微创手术机器人的产业化。上海微创医疗器械(集团)有限公司与重庆金山科技集团也在推进腹腔镜手术机器人的产业化。按照国内一流科研团队与intuitive surgical的差距估算,我国落后美国微创手术手术机器人行业10-20年,但是当手术机器人发展遇到天花板时,差距会迅速缩短,具体案例可以参考血管支架的发展。
<img src="https://pic4.zhimg.com/v2-019484fb4cfcb4ab198e635947507d1b_b.jpg" data-rawwidth="1600" data-rawheight="424" class="origin_image zh-lightbox-thumb" width="1600" data-original="https://pic4.zhimg.com/v2-019484fb4cfcb4ab198e635947507d1b_r.jpg">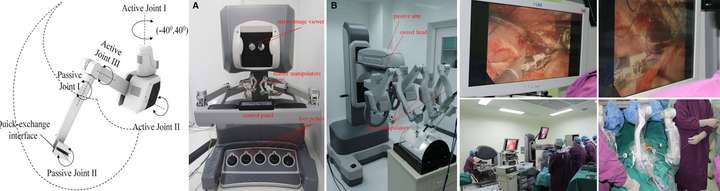
天津大学妙手S系列手术机器人
在其他的医疗手术机器人方面,例如骨科机器人,北京天智航医疗科技股份有限公司在2010年推出获得产品注册证的骨科手术机器人,其最新的“天玑”骨科手术机器人等待CFDA的批准,但是其主要部件机械臂采用UR的工业机器人。
<img src="https://pic1.zhimg.com/v2-520e156ac902a710184490d96f737cd4_b.png" data-rawwidth="902" data-rawheight="909" class="origin_image zh-lightbox-thumb" width="902" data-original="https://pic1.zhimg.com/v2-520e156ac902a710184490d96f737cd4_r.jpg">
北京天智航的天玑™”骨科手术机器人系统
在假肢机器人方面我国较为落后,美国的iWalk公司2006年就将世界首款Bionic ankle–foot prosthesis产品投入市场,而我国目前仅有一些初创企业从事相关方面产品研发。
在康复机器人方面,由于目前产品技术需求较为简单,我国的产品水平与国外差距不大。国内璟和技创的Flexbot康复机器人系统提供从康复早期到完全康复的应用方案,安阳神方康复机器人公司提供上下肢康复机器人解决方案。
<img src="https://pic3.zhimg.com/v2-5642b4eac7c6f1c656bdba090cfaf172_b.png" data-rawwidth="1531" data-rawheight="669" class="origin_image zh-lightbox-thumb" width="1531" data-original="https://pic3.zhimg.com/v2-5642b4eac7c6f1c656bdba090cfaf172_r.jpg">
上海璟和技创的Flexbot多体位智能康复机器人系统
<img src="https://pic1.zhimg.com/v2-c7001b03f3028d2d0d530a05ea88b1f8_b.jpg" data-rawwidth="1269" data-rawheight="857" class="origin_image zh-lightbox-thumb" width="1269" data-original="https://pic1.zhimg.com/v2-c7001b03f3028d2d0d530a05ea88b1f8_r.jpg">
上海傅利叶智能的Fourier X1外骨骼机器人系统
在临床辅助机器人方面,其基础技术与看护机器人类似,针对具体使用环境对看护机器人进行定向开发即可,在此不再累述。
2、 对策及思考
机器人产业与互联网产业有较大区别,机器人产业由于涉及基础理论、基础工业较多,基本不存在弯道超车的情况,只能按部就班的把机器人相关的理论和技术吃透用透,才能设计出类似德国iiwa先进的机器人。在机器人产业最上游人工智能方面,我国与美国启动研究时间差距不大,但是在高级人才方面差别很大,google拥有世界顶尖的科学家和工程师。
但是国家目前没有足够数量的高水平科学家和工程师能够支撑起所有方向的机器人产品研发,贪大求全反而会导致资源分散,因此选取几种国计民生迫切需求的机器人产品进行开发支持和引导,以开发带动研发能力提升和上下游产业发展,是一种可取的思路。
考虑到自主研发的速度不能满足我国的需求,与先进机器人企业合作或者收购国外先进机器人企业也是一种不错的选择,目前美的集团在这方面进行了良好布局。
聘请国外真才实学的教授或者科学家担当我国企业顾问,或者高薪招聘国外先进机器人企业的资深工程师,也是一种加速我国机器人产业发展的可取途径。
结合我国现实需求,针对加速的老龄化和我国国民的高发病症,我国针对医疗方面机器人需求顺序依次为:1、看护机器人;2、手术和介入机器人;3、临床辅助机器人/康复机器人;4,假肢机器人、社会辅助机器人。
http://pan.baidu.com/s/1mi2rZio 本部分文章参考的Roadmap for US Robotics,大家也可以下载阅读原文。
另外还有一些朋友也解读了这个路线图,另外其他几篇阅读我放链接在下面(等我慢慢找找):