在开始下位机编程之前,先要了解下位机编程的基础-各种变量、运动参数和命令行操作。
变量
PMAC的下位机实际上是一种类Basic的编程语言,但是又类似汇编语言,所有变量的存储空间都是预先分配好的,操作的时候存储数据只能在指定的几种变量类型和变量名中存储,整个系统的参数也是存储在变量中。
变量类型和作用如下:
1.I变量
电机和编码器等的参数变量,用于设置电机的速度,精度,回零等数值,以及坐标系的状态,编码器的反馈形式,PID参数等,一句话,设置系统参数就靠它。
举例子如下:
Ixx19->最大手动加速度限制
Ixx20->手动加速时间
Ixx22->手动速度
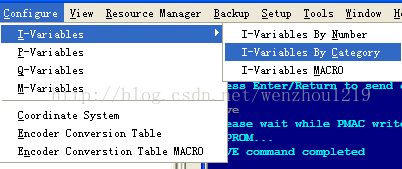
在PEWIN32中,如图打开I参数设置,一般我们使用第二个
如下图,为全局I参数设置,可以根据Description看到不同I参数的含义

如下图,为当前电机的定义,如编码器反馈地址等等。实际上,上节讲到Setup引导设置也是设置电机的I参数,如果我们知道要设置哪些参数,完全可以手动在此修改,不用借助setup程序,setup程序只是做一个人性化界面引导而已。

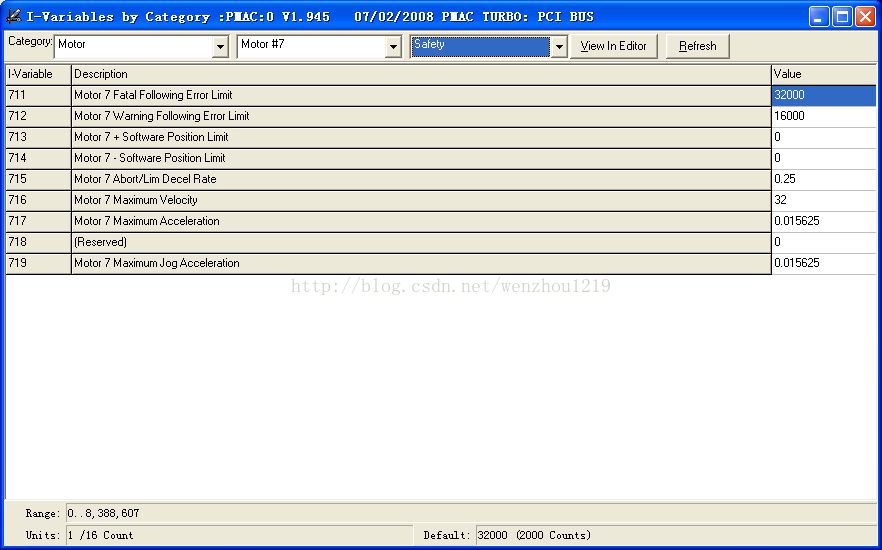
如下图,安全设置包括电机的跟随误差(实际运动位置和命令运动位置的偏差)的Fatal(电机被停止)和Warning(只在Terminal报警,不停止电机),还包括后面讲到Jog的最大加速度设置、运动程序的最大速度和加速度设置,当我们编程序时发现始终运行不到指定的速度很有可能就是此处的设置问题。
如下图,为电机的运动设置,包括后续的Jog的速度、加速度设置等。

如下图,这里保存的就是Tuning Pro调试的结果,同样,如果我们知道要使用什么PID参数,直接在此设置即可。

2.M变量
在PMAC工作时,会将当前运行状态(电机参数,编码器位置,IO参数)放到指定的内存中,我们要查看这部分参数,只需要用M变量绑定指定内存即可访问和设置,有点类似C语言的指针,如下图,这里可以电机Download Suggested M-variables使用PEWIN32推荐的M参数设置,一般我们使用默认设置。
举例子如下:
读取电机状态->给定位置(mx61)、实际位置(mx62)、位置偏差(mx64) 其中x=1-16或1-24
读取I/O口状态->m11

3.P变量和Q变量
PMAC中运动过程参数
对于PMAC中一个指定的运动加速到指定的速度再停止,整个过程如下:
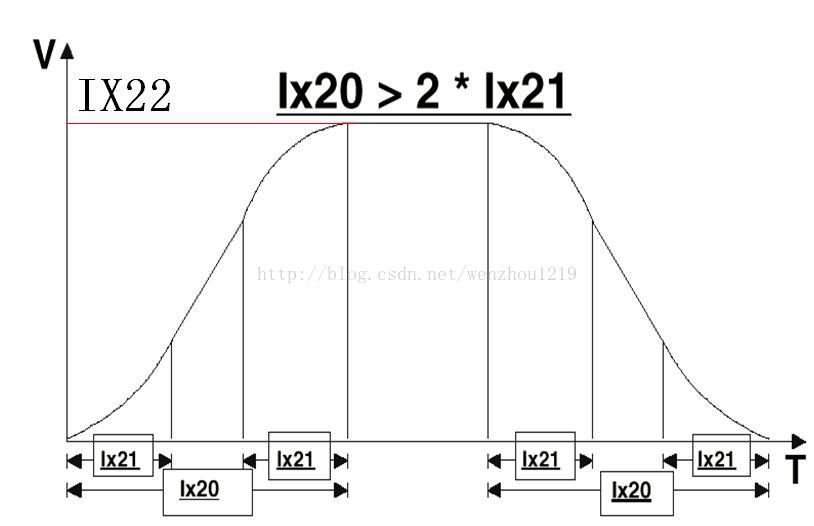
其中IX20指定的为整个加速时间,IX21指定的为开始加速和停止加速时的S曲线加速时间,IX22为最终的速度,这里IX20、IX21、IX22设置的是手动Jog的总加速时间、S曲线加速时间和运动速度。在对应的运动程序中,使用TA、TS、F指令来完成相应的同样的设置。
手动操作
