目录
1.算法理论概述
基于RCNN(Region-based Convolutional Neural Network)深度学习网络的交通标志检测算法的MATLAB仿真。该算法通过使用深度学习网络进行目标检测,针对交通标志的特点和挑战,设计了相应的实现步骤,并分析了实现中的难点。通过本文的研究,可以进一步理解和应用基于深度学习的交通标志检测算法。
交通标志检测在智能交通系统和驾驶辅助系统中具有重要作用。传统的基于特征工程的方法往往需要手工提取特征并设计分类器,效果受限。而基于深度学习的方法,如RCNN,能够自动从数据中学习特征和分类器,具有更好的性能和泛化能力。
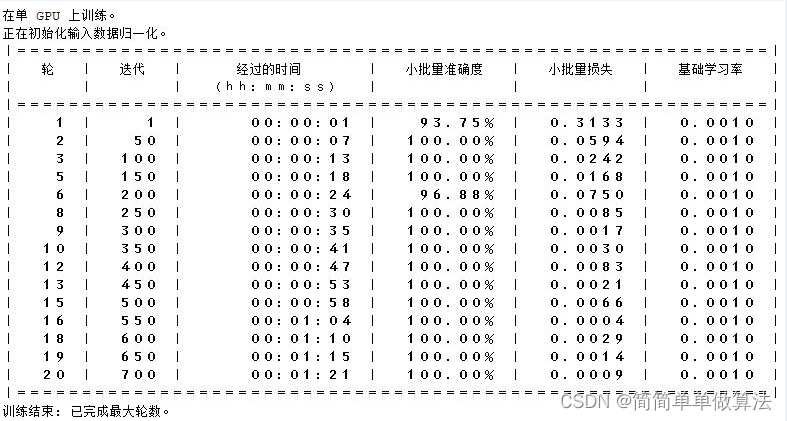
1.1 网络训练
- 使用预训练的深度学习网络,如AlexNet或VGGNet,作为特征提取器。
- 将交通标志数据集输入网络进行训练,采用端到端的方式,同时学习特征和分类器。
- 通过反向传播算法和梯度下降优化算法,更新网络的权重和偏置,使得网络能够更好地预测交通标志的位置和类别。
1.2 目标检测
- 对待检测图像进行预处理,包括图像尺寸调整、归一化、增强等操作,以提高检测性能和鲁棒性。
- 在预处理后的图像上运行训练好的网络,提取候选区域和相应的特征。
- 对候选区域应用非极大值抑制(NMS)算法,去除高度重叠的候选框。
- 使用分类器对每个候选区域进行分类,并根据分类结果和置信度对候选框进行筛选,得到最终的交通标志检测结果。
- 深度学习网络模型可以表示为: Z = f(WX + b) 其中,Z是网络的输出,W是权重矩阵,X是输入特征,b是偏置向量,f是激活函数。
1.3 目标检测评价指标
- 常用的目标检测评价指标包括准确率、召回率、F1分数等,可以用以下公式表示: 准确率 = 正确检测的交通标志数 / 总检测的交通标志数 召回率 = 正确检测的交通标志数 / 真实的交通标志数 F1分数 = 2 * (准确率 * 召回率) / (准确率 + 召回率)
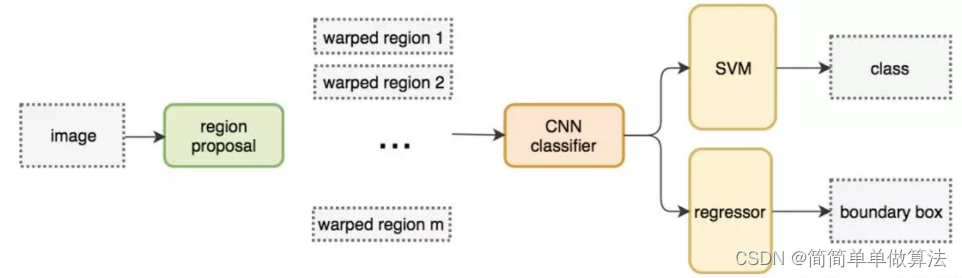
完整的R-CNN的结构图:
2.部分核心程序
folder = 'test_images/';% 测试图像文件夹路径
file_list = dir(fullfile(folder, '*.jpg'));% 获取文件夹中所有jpg格式的图像文件列表
for i = 1:7% 对前7张图像进行目标检测和可视化
img = imread(file_list(i).name);% 读取图像
[bbox, score, label] = detect(frcnn, img);% 使用RCNN模型对图像进行目标检测
if isempty(label)==0
% 在图像上插入目标边界框和置信度
detectedImg = insertObjectAnnotation(img,'rectangle',bbox,score);
figure
imshow(detectedImg) % 显示带有目标边界框和置信度的图像
clear bbox score
else% 如果未检测到目标
figure
imshow(img);title('检测失败');% 显示原始图像,并显示检测失败的标识
clear bbox score
end
end
00233.算法运行软件版本
matlab2022a
4.算法运行效果图预览






5.算法完整程序工程
OOOOO
OOO
O