相机对焦的原理和实现方法
1 原理介绍:
对焦有三种思路:
1.1点扩散函数“原理:
也就是观测画面中线条边缘的对比度,对比度最高时即合焦。与此同时,对比度最高也意味着入射光线°形成的每个“点”的能量达到最大,因为合焦即光线完全汇聚,所以即可以通过对比度高低来判断,也可以通过能量大小来判断。但问题就是,焦点在前在后所造成的低反差,在反差对焦系统只里没有差别,所以需要推动焦点前后移动反复检测出正确的聚焦位置。人眼看着毛玻璃纯手动对焦Q也是如此。
1.2 测距原理:对焦的本质是测距:
也就是把焦平面推移到你希望合焦的物体上。从某种意义上讲焦点往后的的相距空间内部有无数个合焦平面,你只需要前后移动传感器平面,即可获得焦点推移的效果。因此不论是早期三角函数·黄斑测距,还是激光对焦测距,都是通过判定距离来合焦。缺点是测距的范围有限。
1.3.相位检测只原理:
相位对焦虽然也涉及测距,但值得单独一提。
[失焦]时的[画面虚化],虽然都表现为模糊,但其实分为两种,一种是焦点在前,一种是焦点在后一这两种[虚化]是不一样的,在相位对焦系统只里是可分辨的。也就是说,不管是裂像屏还是dual pixel裂相微透镜%,他们都能够直接分辨此刻模糊的画面中的焦点在后还是在前。也正是如此,相位对焦能够直接检测拍摄对象的相对位置,一步将焦平面推移正确,而不用反复拉风箱检测焦点。因此相位对焦是目前最主流的对焦方式。当然也更可以配合反差或激光来获得最准确的结果。相位对焦的问题在于,只能精确检测与对焦模块相垂直或附近角度的线条。纵切的像素检测横向线条,横切的像素检测纵向线条。纵切的像素面对纵向的线条时则左右像素画面一致,这就无法形成上下不一的裂相了。如果你使用过裂像对焦屏只,这个道理就更好理解。
具体而言,单反相机通过在反光镜上挖出半反射区域,让部分原本应该进入取景器的光线射入相位对焦模块,来专门用于对焦。而无反相机只则更多通过在传感器上的掏出几百个像素来作为相位对焦检测点来实现。更高级的传感器,比如佳能新机器以及绝大部分旗舰手机的主摄,则使用全像素双核对焦的方式,把所有成像像素一分为二,全面无死角地参与相位检测,从而实现高速准确的对焦。
当然,一分为四也可以。
2.实现方法2
通过某种检测手段来获得目标场景在系统中精确的焦点位置,并配合电机驱动来实现合焦,一般可以分为**主动对焦和被动对焦**:
主动对焦:利用测距手段来获得物距,再通过成像模型在实现合焦,比如双目,结构光,tof这种。在平时用到的相机中。
被动对焦,即基于获得的图像信息并根据定义的评价函数来实现合焦。
被动对焦也有两种常用的方法:
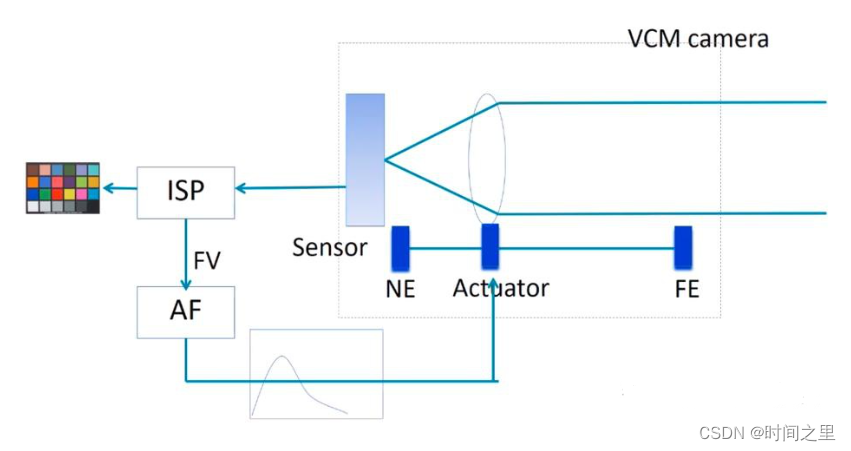
第一种是CDAF,也就是根据图像的对比度,或者说是锐度,来进行调焦。在调焦的单位,通过扫描记录各位置处的图像,基于锐度评价函数来计算锐度值(每个图像都有个锐度值) 。锐度评价函数的思想就是在相机聚焦好的时候,图像细节丰富,其局部特征很明显
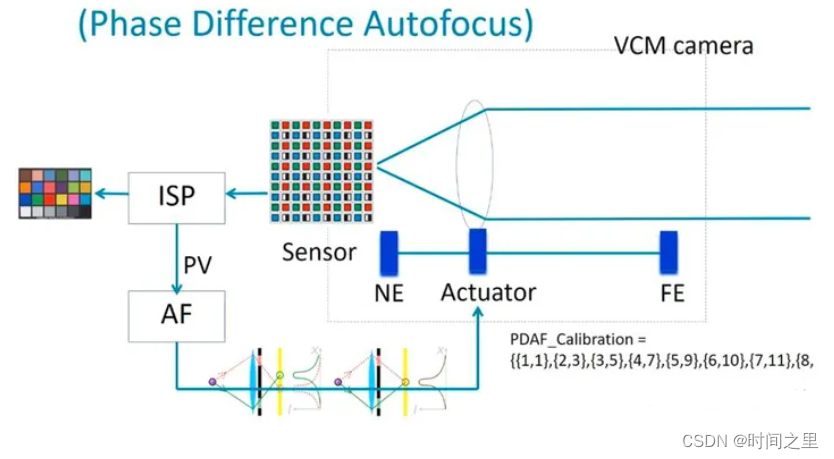
第二种是PDAF,相位检测聚焦,是目前单反相机中普遍的方法,类似人的眼睛通过视差来判断深度的对焦万法,通过相机不同像素的相位差信息,来判断出对焦位置(相位差为零)。光束通过镜头被分成两个部分,分别在不同的两组成像器件上成像。
若合焦,那么两幅图像相同,若离焦,则两幅图像有所偏移。
PDAF通过两幅图像的偏移量。推算出离焦量,从而实现对焦。我们这里的相位差是通过senso产生的,有dual PD,shield pixel等方式。