Halo,这里是Ppeua。平时主要更新C++,数据结构算法…感兴趣就关注我吧!你定不会失望。
文章目录

0.ROS中的坐标转换消息包
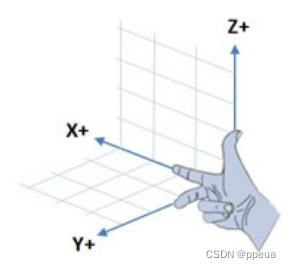
在日常生活中,特别是对于机器人来说,各个目标系中的坐标转换是很关键的,通过右手系来标注坐标。
ROS中提供了坐标转换的软件包 Transform Frame TF的作用是ROS中实现不同坐标点/向量的转换。
不过TF在若干个版本前已经弃用,现在使用的是全新的版本:TF2,其有几个相关的功能包:
- tf2_geometry_msgs:可以将ROS消息转换成tf2消息。
- tf2: 封装了坐标变换的常用消息。
- tf2_ros:为tf2提供了roscpp和rospy绑定,封装了坐标变换常用的API。
在坐标系转换中,在geometry下有两个重要的消息类型:TransformStamped、PointStamped,前者用于坐标系间的转换,后者用于点之间的坐标转换,这对我们之后的使用很重要。先来了解下这两种消息类型中的内容。
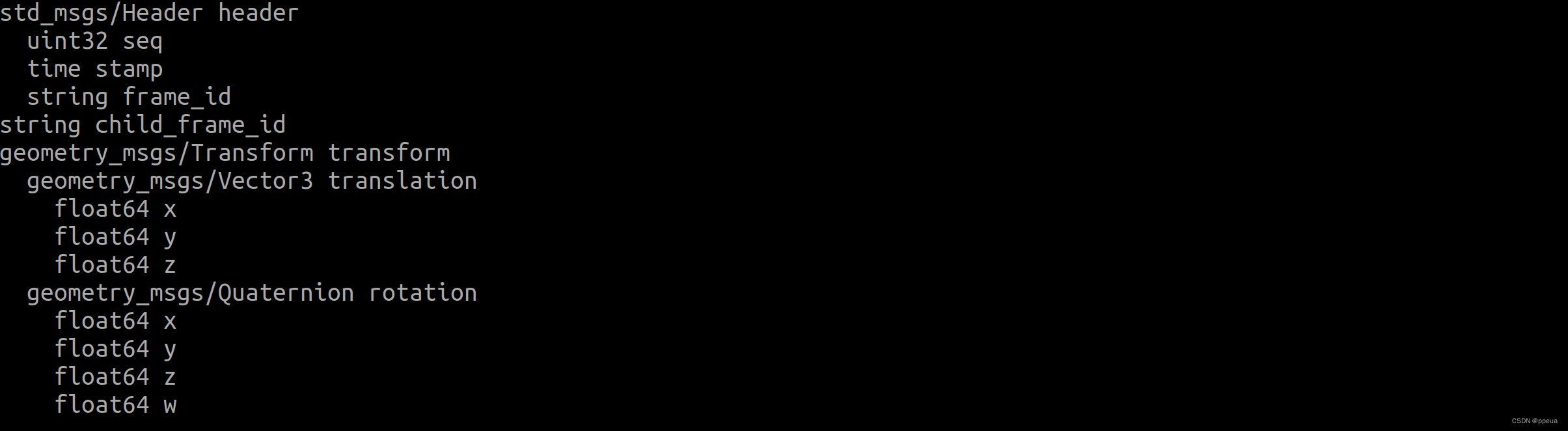
0.1 geometry_msgs/TransformStamped
该消息类型表示坐标系之间的关系
在终端中输入
rosmsg info geometry_msgs/TransformStamped
查看该消息类型的具体信息:
std_msgs/Header header # 头信息
uint32 seq ## 序列号
time stamp ## 时间戳
string frame_id ## 坐标
string child_frame_id # 子坐标
geometry_msgs/Transform transform #坐标信息
geometry_msgs/Vector3 translation ##偏移量
float64 x
float64 y
float64 z
geometry_msgs/Quaternion rotation #四元数(欧拉角)
float64 x
float64 y
float64 z
float64 w
可以看出 PointStamped消息是由:
std_msgs/Header,string,geometry_msgs/Transform封装在一起,组成的新消息类型。
其中Transform又是由geometry_msgs/Vector3,geometry_msgs/Quaternion进行封装的。
0.2 geometry_msgs/PointStamped
该消息类型表示坐标点之间的转换
在终端中输入
rosmsg info geometry_msgs/PointStamped
可以查看该消息中的具体信息
std_msgs/Header header #头信息
uint32 seq ##序列号
time stamp ##时间戳
string frame_id ##坐标系
geometry_msgs/Point point #点坐标
float64 x
float64 y
float64 z
可以看出 PointStamped消息是由:
std_msgs/Header与geometry_msgs/Point封装在一起,组成的新消息类型。
1.静态坐标转换
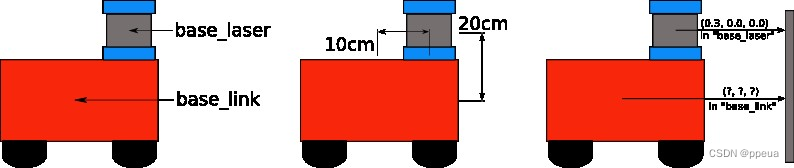
现有一机器人模型,核心构成包含主体与雷达,各对应一坐标系,坐标系的原点分别位于主体与雷达的物理中心,已知雷达原点相对于主体原点位移关系如下: x 0.2 y0.0 z0.5。当前雷达检测到一障碍物,在雷达坐标系中障碍物的坐标为 (2.0 3.0 5.0),请问,该障碍物相对于主体的坐标是多少?
组织下我们发布方的整体逻辑:
- 导入所需功能包
- 初始化ros节点
- 创建静态坐标广播器
- 编写静态坐标信息
- 发送消息
- spin()
这里是接收方的逻辑:
- 导入所需要的功能包
- 初始化ros节点
- 创建TF订阅对象
- 创建lase的坐标点
- 坐标转换
- spin()
1.1导入所需功能包
在这个案例中,需要:rospy,std_msgs 这两个标准件
还需要:
tf2:封装了坐标变换的常用消息。
tf2_ros: 为tf2提供了roscpp和rospy绑定,封装了坐标变换常用的API。
tf2_geometry_msgs:可以将ROS消息转换成tf2消息。
1.2发布方实现
"""
导入功能包
"""
import tf2_ros
from geometry_msgs.msg import TransformStamped
import tf
import rospy
"""
初始化节点信息
创建发布对象
组织发布数据
发布数据
spin()
"""
#初始化ros节点
rospy.init_node("static_pub")
#创建静态发布对象
pub=tf2_ros.StaticTransformBroadcaster()
#组织消息类型
ts=TransformStamped()
ts.header.seq=123
ts.header.stamp=rospy.Time.now()
ts.child_frame_id="laser"
ts.header.frame_id="frame_id"
ts.transform.translation.x=0.2
ts.transform.translation.y=0
ts.transform.translation.z=0.5
"""
将欧拉角放到四元数中进行转换
用到了tf中的transformation.quaternion_from_euler
"""
qtn=tf.transformations.quaternion_from_euler(0,0,0)
ts.transform.rotation.x=qtn[0]
ts.transform.rotation.y=qtn[1]
ts.transform.rotation.z=qtn[2]
ts.transform.rotation.w=qtn[3]
#发布消息
pub.sendTransform(tf)
rospy.spin()
1.3 订阅方实现
"""
导入功能包
"""
import rospy
from tf2_geometry_msgs import tf2_geometry_msgs
import tf2_ros
#初始化节点
rospy.init_node("static_sub")
#创建缓存对象
buffer=tf2_ros.Buffer()
"""
调用tf2_ros.Buffer()创建一个buffer用来存储坐标消息
"""
tf2_ros.TransformListener(buffer)
"""
监听tf坐标变换,将值存入buffer中
"""
"""
创建点坐标信息
"""
ps=tf2_geometry_msgs.PointStamped()
ps.header.stamp=rospy.Time.now()
ps.header.frame_id="laser"
ps.point.x=2.0
ps.point.y=3.0
ps.point.z=5.0
rate=rospy.Rate(10)
while not rospy.is_shutdown():
try:
"""
调用buffer.transform 将点坐标与原始坐标进行转换
"""
ps_out=buffer.transform(ps,"frame_id")
rospy.loginfo("转换后的坐标:(%.2f,%.2f,%.2f),参考坐标系:%s",
ps_out.point.x,
ps_out.point.y,
ps_out.point.z,
ps_out.header.frame_id)
except Exception as ee:
rospy.logwarn("错误提示%s",ee)
rate.sleep()
1.4 tf2_ros实现静态坐标转换
由于静态坐标转换中的整体逻辑大致相同,所以tf2_ros提供了一个功能包来直接实现坐标转换,不需要每次都使用编写代码
rosrun tf2_ros static_transform_publisher x偏移量 y偏移量 z偏移量 z偏航角度 y俯仰角度 x翻滚角度 父级坐标系 子级坐标系
2.动态坐标转换
在现实生活中,我们面对的不仅有点对点的坐标转换,还动态的坐标转换。
我们以乌龟为例来实现一下动态坐标转换
先来组织下发布方的逻辑
- 导包 rospy std_msgs tf2 tf2_ros tf2_geometry_msgs geometry_msgs turtlesim
- 初始化ros节点
- 订阅 /turtle1/pose 话题消息
- 回调函数
- 创建TF广播器
- 组织广播数据
- 广播器发布数据
- spin
接收方的逻辑 - 导包
- 初始化ros节点
- 创建TF对象
- 处理订阅数据
2.1发布方实现
import rospy
from turtlesim.msg import Pose
import tf2_ros
from geometry_msgs.msg import TransformStamped
import tf
"""
订阅乌龟的位姿信息
"""
def doPose(pose):
#创建动态坐标发布对象
pub=tf2_ros.TransformBroadcaster()
#组织点坐标消息类型
ts=TransformStamped()
ts.header.frame_id="world"
ts.child_frame_id="turtle1"
ts.header.stamp=rospy.Time.now()
#坐标系相对于子集坐标系
ts.transform.translation.x=pose.x
ts.transform.translation.y=pose.y
ts.transform.translation.z=0
#四元数转换
qtn=tf.transformations.quaternion_from_euler(0,0,pose.theta)
ts.transform.rotation.x=qtn[0]
ts.transform.rotation.y=qtn[1]
ts.transform.rotation.z=qtn[2]
ts.transform.rotation.w=qtn[3]
pub.sendTransform(ts)
#初始化ROS节点
rospy.init_node("tf02_pub")
#订阅消息位姿信息,创建回调函数
sub=rospy.Subscriber("/turtle1/pose",Pose,doPose,queue_size=100)
rospy.spin()
2.2订阅方逻辑
import rospy
import tf2_ros
# 不要使用 geometry_msgs,需要使用 tf2 内置的消息类型
from tf2_geometry_msgs import PointStamped
# from geometry_msgs.msg import PointStamped
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("static_sub_tf_p")
# 3.创建 TF 订阅对象
buffer = tf2_ros.Buffer()
# 监听坐标变换存入buffer中
tf2_ros.TransformListener(buffer)
rate = rospy.Rate(1)
while not rospy.is_shutdown():
# 4.创建坐标点信息
# 仅需提供目标坐标系
point_source = PointStamped()
point_source.header.frame_id = "turtle1"
point_source.header.stamp = rospy.Time.now()
try:
# 5.调研订阅对象的 API 将 4 中的点坐标转换成相对于 world 的坐标
point_target = buffer.transform(point_source,"world",rospy.Duration(1))
rospy.loginfo("转换结果:x = %.2f, y = %.2f, z = %.2f",
point_target.point.x,
point_target.point.y,
point_target.point.z)
except Exception as e:
rospy.logerr("异常:%s",e)
# 6.spin
rate.sleep()
2.3实现效果
首先启动turtlesim的键盘控制节点与GUI
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
接着启动发布方与接收方 之后就可以在屏幕上看到转换后的坐标系
rosrun tf02_dynamic demo01_tf02_pub.py
rosrun tf02_dynamic demo01_tf02_sub.py

3.0多坐标转换
将多个坐标先相对于世界坐标系进行转换,然后在调用api将转换后的数据进行相互转换
3.1发布方实现
直接调用静态坐标转换的ros包,写成launch文件
<launch>
<node pkg="tf2_ros" type="static_transform_publisher" name="son1" args="0.2 0.8 0.3 0 0 0 /world /son1" output="screen" />
<node pkg="tf2_ros" type="static_transform_publisher" name="son2"
args="0.5 0 0 0 0 0 /world /son2"
output="screen"/>
</launch>
3.2订阅方实现
订阅方逻辑实现
- 导入包 rospy std_msgs tf2_ros geometry_msgs(TransformStamped 坐标系转换) tf2_geomerty_msgs(PointStamped 坐标点转换)
- 初始化ros节点
- 创建TF订阅对象,实现两个坐标系之间相互转换
import rospy
from tf2_geometry_msgs import tf2_geometry_msgs
import tf2_ros
from geometry_msgs.msg import TransformStamped
rospy.init_node("static_sub")
#创建缓存对象
buffer=tf2_ros.Buffer()
sub=tf2_ros.TransformListener(buffer)
rate=rospy.Rate(10)
while not rospy.is_shutdown():
try:
"""
计算son1相对于son2的坐标关系
lookup_transform(父级坐标系,子级坐标系,取坐标的时间,时间间隔)
"""
ts=buffer.lookup_transform("son2","son1",rospy.Time(0))
rospy.loginfo("父级坐标系:%s,子级坐标系:%s,%.2f,%.2f,%.2f",
ts.header.frame_id,
ts.child_frame_id,
ts.transform.translation.x,
ts.transform.translation.y,
ts.transform.translation.z
)
except Exception as ee:
pass
rospy.logwarn("错误提示%s",ee)
rate.sleep()
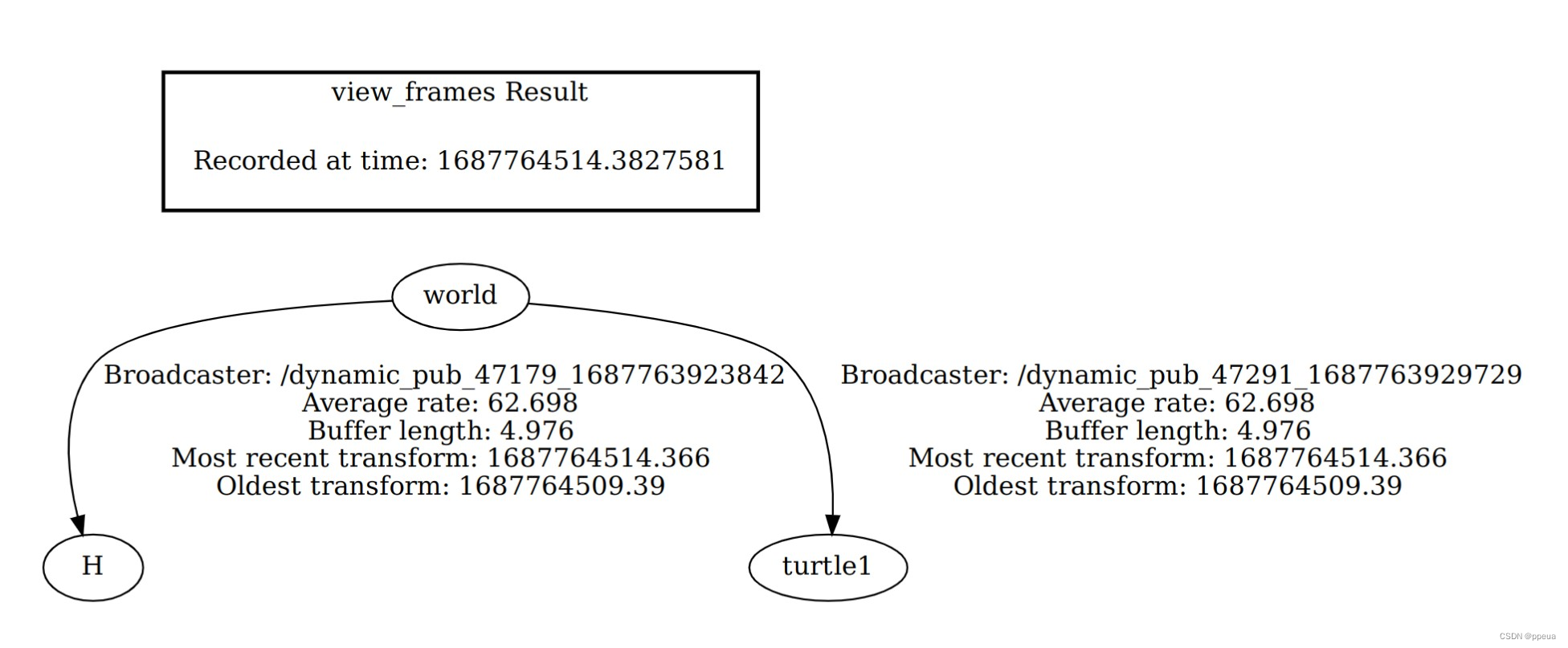
3.3 view_frames查看当前坐标系
运行以上节点后,在任意工作目录下输入
rosrun tf2_tools view_frames.py
会在当前目录下生成一个可以坐标关系的pdf,可以利用此工具查看坐标关系
请添加图片描述
4.0 tf坐标变换实操
我们先来创建turtle,运行turtlesim这个节点
rosrun turtlesim turtlesim_node
通过rosservice的/spawn服务来多生成一只turtle来完成我们的多坐标转换,生成一只名为H的乌龟
rosservice call /spawn
"x: 0.0
y: 0.0
theta: 0.0
name: ''"
若返回输入的名字,此时就能在屏幕上看到刚刚生成的那只乌龟
准备工作都做完了,现在开始创建坐标系
4.1乌龟位姿信息发布
先来理清整个跟随的逻辑:
- 在坐标系中发布两只乌龟的信息
- 将第二只乌龟的位姿信息相对第一只乌龟作转换
- 控制cmd发布速度信息
import rospy
import sys
from turtlesim.msg import Pose
import tf2_ros
from geometry_msgs.msg import TransformStamped
import tf
def doPose(pose):
pub=tf2_ros.TransformBroadcaster()
ts=TransformStamped()
ts.header.frame_id="world"
ts.header.stamp=rospy.Time.now()
ts.child_frame_id=turtle_name
ts.transform.translation.x=pose.x
ts.transform.translation.y=pose.y
qtn=tf.transformations.quaternion_from_euler(0,0,pose.theta)
ts.transform.rotation.x=qtn[0]
ts.transform.rotation.y=qtn[1]
ts.transform.rotation.z=qtn[2]
ts.transform.rotation.w=qtn[3]
pub.sendTransform(ts)
rospy.init_node("dynamic_pub",anonymous=True)
if len(sys.argv)>=2:
turtle_name=sys.argv[1]
sub=rospy.Subscriber(turtle_name+"/pose",Pose,doPose,queue_size=10)
rospy.spin()
else:
print(sys.argv[1])
rospy.loginfo("请输入坐标名称")
sys.exit()
这份代码出现过很多次了,这里就不过多赘述。注意:sys.argv的第一个参数为文件名 之后的为传入参数
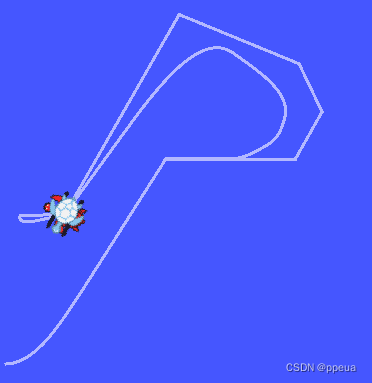
4.2 控制乌龟进行跟随运动
总体逻辑:
- 计算两个乌龟之间的相对坐标
- 控制乌龟的线速度与角速度
- 发布
import rospy
from tf2_geometry_msgs import tf2_geometry_msgs
import tf2_ros
from geometry_msgs.msg import TransformStamped,Twist
import math
import sys
"""
创建订阅对象
组织被转换的坐标点
转换逻辑实现调用tf封装的算法
输出结果
"""
rospy.init_node("static_sub")
#创建缓存对象
buffer=tf2_ros.Buffer()
sub=tf2_ros.TransformListener(buffer)
pub=rospy.Publisher("/H/cmd_vel",Twist,queue_size=10)
rate=rospy.Rate(10)
while not rospy.is_shutdown():
try:
"""
计算son1相对于son2的坐标关系
直接监听整个坐标系,不需要订阅话题
"""
ts=buffer.lookup_transform("H","turtle1",rospy.Time(0))
rospy.loginfo("父级坐标系:%s,子级坐标系:%s,%.2f,%.2f,%.2f",
ts.header.frame_id,
ts.child_frame_id,
ts.transform.translation.x,
ts.transform.translation.y,
ts.transform.translation.z
)
twist=Twist()
twist.linear.x=0.5*math.sqrt(math.pow(ts.transform.translation.x,2)+math.pow(ts.transform.translation.y,2))
twist.angular.z=4*math.atan2(ts.transform.translation.y,ts.transform.translation.x)
pub.publish(twist)
except Exception as ee:
pass
rospy.logwarn("错误提示%s",ee)
rate.sleep()
4.3查看当前坐标关系
rosrun tf2_tools view_frames.py