文章和代码已经归档至【Github仓库:https://github.com/timerring/dive-into-AI 】或者公众号【AIShareLab】回复 pytorch教程 也可获取。
文章目录
nn网络层-卷积层
1D/2D/3D 卷积
卷积有一维卷积、二维卷积、三维卷积。一般情况下,卷积核在几个维度上滑动,就是几维卷积。比如在图片上的卷积就是二维卷积。
一维卷积
二维卷积
三维卷积
二维卷积:nn.Conv2d()
nn.Conv2d(self, in_channels, out_channels, kernel_size, stride=1,
padding=0, dilation=1, groups=1,
bias=True, padding_mode='zeros')
这个函数的功能是对多个二维信号进行二维卷积,主要参数如下:
- in_channels:输入通道数
- out_channels:输出通道数,等价于卷积核个数
- kernel_size:卷积核尺寸
- stride:步长
- padding:填充宽度,主要是为了调整输出的特征图大小,一般把 padding 设置合适的值后,保持输入和输出的图像尺寸不变。
- dilation:空洞卷积大小,默认为 1,这时是标准卷积,常用于图像分割任务中,主要是为了提升感受野
- groups:分组卷积设置,主要是为了模型的轻量化,如在 ShuffleNet、MobileNet、SqueezeNet 中用到
- bias:偏置
卷积尺寸计算
简化版卷积尺寸计算
这里不考虑空洞卷积,假设输入图片大小为 $ I \times I$,卷积核大小为 k × k k \times k k×k,stride 为 s s s,padding 的像素数为 p p p,图片经过卷积之后的尺寸 $ O $ 如下:
O = I − k + 2 × p s + 1 O = \displaystyle\frac{I -k + 2 \times p}{s} +1 O=sI−k+2×p+1
下面例子的输入图片大小为 5 × 5 5 \times 5 5×5,卷积大小为 3 × 3 3 \times 3 3×3,stride 为 1,padding 为 0,所以输出图片大小为 5 − 3 + 2 × 0 1 + 1 = 3 \displaystyle\frac{5 -3 + 2 \times 0}{1} +1 = 3 15−3+2×0+1=3。
完整版卷积尺寸计算
完整版卷积尺寸计算考虑了空洞卷积,假设输入图片大小为 $ I \times I$,卷积核大小为 k × k k \times k k×k,stride 为 s s s,padding 的像素数为 p p p,dilation 为 d d d,图片经过卷积之后的尺寸 $ O $ 如下:。
O = I − d × ( k − 1 ) + 2 × p − 1 s + 1 O = \displaystyle\frac{I - d \times (k-1) + 2 \times p -1}{s} +1 O=sI−d×(k−1)+2×p−1+1
卷积网络示例
这里使用 input * channel 为 3,output_channel 为 1 ,卷积核大小为 3 × 3 3 \times 3 3×3 的卷积核nn.Conv2d(3, 1, 3),使用nn.init.xavier_normal*()方法初始化网络的权值。代码如下:
import os
import torch.nn as nn
from PIL import Image
from torchvision import transforms
from matplotlib import pyplot as plt
from common_tools import transform_invert, set_seed
set_seed(3) # 设置随机种子
# ================================= load img ==================================
path_img = os.path.join(os.path.dirname(os.path.abspath(__file__)), "imgs", "lena.png")
print(path_img)
img = Image.open(path_img).convert('RGB') # 0~255
# convert to tensor
img_transform = transforms.Compose([transforms.ToTensor()])
img_tensor = img_transform(img)
# 添加 batch 维度
img_tensor.unsqueeze_(dim=0) # C*H*W to B*C*H*W
# ================================= create convolution layer ==================================
# ================ 2d
flag = 1
# flag = 0
if flag:
conv_layer = nn.Conv2d(3, 1, 3) # input:(i, o, size) weights:(o, i , h, w)
# 初始化卷积层权值
nn.init.xavier_normal_(conv_layer.weight.data)
# nn.init.xavier_uniform_(conv_layer.weight.data)
# calculation
img_conv = conv_layer(img_tensor)
# ================ transposed
# flag = 1
flag = 0
if flag:
conv_layer = nn.ConvTranspose2d(3, 1, 3, stride=2) # input:(input_channel, output_channel, size)
# 初始化网络层的权值
nn.init.xavier_normal_(conv_layer.weight.data)
# calculation
img_conv = conv_layer(img_tensor)
# ================================= visualization ==================================
print("卷积前尺寸:{}\n卷积后尺寸:{}".format(img_tensor.shape, img_conv.shape))
img_conv = transform_invert(img_conv[0, 0:1, ...], img_transform)
img_raw = transform_invert(img_tensor.squeeze(), img_transform)
plt.subplot(122).imshow(img_conv, cmap='gray')
plt.subplot(121).imshow(img_raw)
plt.show()
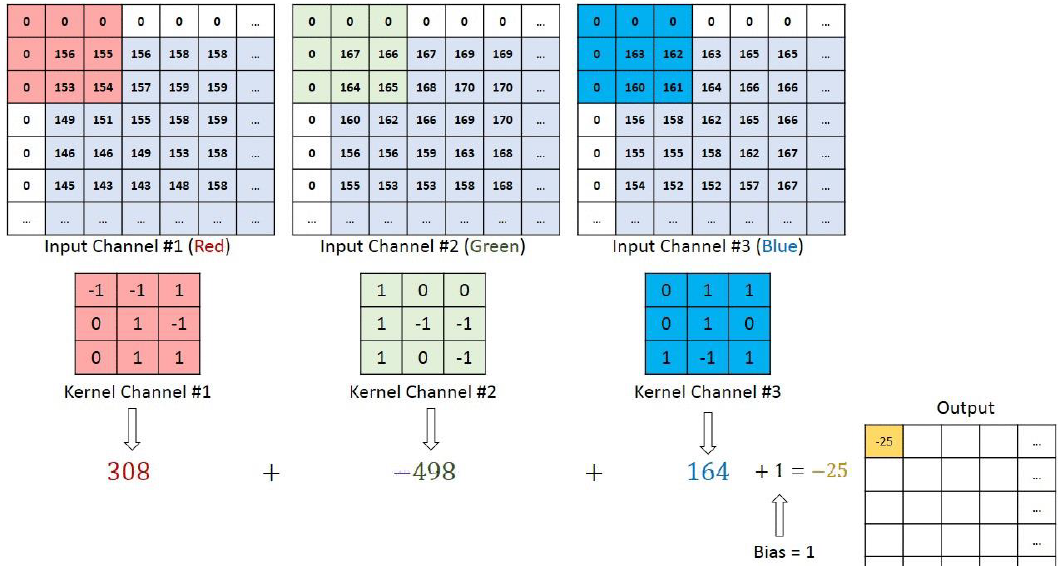
通过conv_layer.weight.shape查看卷积核的 shape 是(1, 3, 3, 3),对应是(output_channel, input_channel, kernel_size, kernel_size)。所以第一个维度对应的是卷积核的个数,每个卷积核都是(3,3,3)。虽然每个卷积核都是 3 维的,执行的却是 2 维卷积。下面这个图展示了这个过程。

也就是每个卷积核在 input_channel 维度再划分,这里 input_channel 为 3,那么这时每个卷积核的 shape 是(3, 3)。3 个卷积核在输入图像的每个 channel 上卷积后得到 3 个数,把这 3 个数相加,再加上 bias,得到最后的一个输出。
转置卷积:nn.ConvTranspose()
转置卷积又称为反卷积 (Deconvolution) 和部分跨越卷积 (Fractionally strided Convolution),用于对图像进行上采样。
正常卷积如下:

原始的图片尺寸为 4 × 4 4 \times 4 4×4,卷积核大小为 3 × 3 3 \times 3 3×3, p a d d i n g = 0 padding =0 padding=0, s t r i d e = 1 stride = 1 stride=1。由于卷积操作可以通过矩阵运算来解决,因此原始图片可以看作 16 × 1 16 \times 1 16×1 的矩阵 I 16 × 1 I_{16 \times 1} I16×1,
为什么是16 * 1,因为16是它所有的像素点个数,1是它的图片张数。
卷积核可以看作 4 × 16 4 \times 16 4×16 的矩阵 K 4 × 16 K_{4 \times 16} K4×16,其中,那么输出是 K 4 × 16 × I 16 × 1 = O 4 × 1 K_{4 \times 16} \times I_{16 \times 1} = O_{4 \times 1} K4×16×I16×1=O4×1 。(是卷积核 * 图像)
这里的4是输出特征图像素值的总个数,16是通过卷积核补零,符合原图片像素点个数得到的。
转置卷积如下:

原始的图片尺寸为 2 × 2 2 \times 2 2×2,卷积核大小为 3 × 3 3 \times 3 3×3, p a d d i n g = 0 padding =0 padding=0, s t r i d e = 1 stride = 1 stride=1。由于卷积操作可以通过矩阵运算来解决,因此原始图片可以看作 4 × 1 4 \times 1 4×1 的矩阵 I 4 × 1 I_{4 \times 1} I4×1,
这里的4同样是原图的像素点个数。
卷积核可以看作 4 × 16 4 \times 16 4×16 的矩阵 K 16 × 4 K_{16 \times 4} K16×4,
这里的4不再是通过补零得到的,而是通过剔除得到的。如上图,本来卷积核有9个像素点,但是在实际的情况中卷积核最大只能计算到4个像素点,因此这里就是4。
16是根据输入公式计算得到的输出图片的大小。
那么输出是 K 16 × 4 × I 4 × 1 = O 16 × 1 K_{16 \times 4} \times I_{4 \times 1} = O_{16 \times 1} K16×4×I4×1=O16×1 。
正常卷积核转置卷积矩阵的形状刚好是转置关系,因此称为转置卷积,但里面的权值不是一样的,卷积操作也是不可逆的,简单来讲,就是一张图片经过卷积,然后再经过转置卷积,无法得到原来的图片。
PyTorch 中的转置卷积函数如下:
nn.ConvTranspose2d(self, in_channels, out_channels, kernel_size, stride=1,
padding=0, output_padding=0, groups=1, bias=True,
dilation=1, padding_mode='zeros')
和普通卷积的参数基本相同。
转置卷积尺寸计算
简化版转置卷积尺寸计算
这里不考虑空洞卷积,假设输入图片大小为 $ I \times I$,卷积核大小为 k × k k \times k k×k,stride 为 s s s,padding 的像素数为 p p p,图片经过卷积之后的尺寸 $ O $ 如下,刚好和普通卷积的计算是相反的:
O = ( I − 1 ) × s + k O = (I-1) \times s + k O=(I−1)×s+k
out size = ( in size − 1 ) ∗ s t r i d e + kernel size \text { out } _{\text {size }}=\left(\text { in }_{\text {size }}-1\right) * s t r i d e+\text { kernel }_{\text {size }} out size =( in size −1)∗stride+ kernel size
完整版简化版转置卷积尺寸计算
O = ( I − 1 ) × s − 2 × p + d × ( k − 1 ) + o u t p a d d i n g + 1 O = (I-1) \times s - 2 \times p + d \times (k-1) + out_padding + 1 O=(I−1)×s−2×p+d×(k−1)+outpadding+1
转置卷积代码示例如下:
import os
import torch.nn as nn
from PIL import Image
from torchvision import transforms
from matplotlib import pyplot as plt
from common_tools import transform_invert, set_seed
set_seed(3) # 设置随机种子
# ================================= load img ==================================
path_img = os.path.join(os.path.dirname(os.path.abspath(__file__)), "imgs", "lena.png")
print(path_img)
img = Image.open(path_img).convert('RGB') # 0~255
# convert to tensor
img_transform = transforms.Compose([transforms.ToTensor()])
img_tensor = img_transform(img)
# 添加 batch 维度
img_tensor.unsqueeze_(dim=0) # C*H*W to B*C*H*W
# ================================= create convolution layer ==================================
# ================ 2d
# flag = 1
flag = 0
if flag:
conv_layer = nn.Conv2d(3, 1, 3) # input:(i, o, size) weights:(o, i , h, w)
# 初始化卷积层权值
nn.init.xavier_normal_(conv_layer.weight.data)
# nn.init.xavier_uniform_(conv_layer.weight.data)
# calculation
img_conv = conv_layer(img_tensor)
# ================ transposed
flag = 1
# flag = 0
if flag:
conv_layer = nn.ConvTranspose2d(3, 1, 3, stride=2) # input:(input_channel, output_channel, size)
# 初始化网络层的权值
nn.init.xavier_normal_(conv_layer.weight.data)
# calculation
img_conv = conv_layer(img_tensor)
# ================================= visualization ==================================
print("卷积前尺寸:{}\n卷积后尺寸:{}".format(img_tensor.shape, img_conv.shape))
img_conv = transform_invert(img_conv[0, 0:1, ...], img_transform)
img_raw = transform_invert(img_tensor.squeeze(), img_transform)
plt.subplot(122).imshow(img_conv, cmap='gray')
plt.subplot(121).imshow(img_raw)
plt.show()
转置卷积前后图片显示如下,左边原图片的尺寸是 (512, 512),右边转置卷积后的图片尺寸是 (1025, 1025)。
转置卷积后的图片一般都会有棋盘效应,像一格一格的棋盘,这是转置卷积的通病。
关于棋盘效应的解释以及解决方法,推荐阅读Deconvolution And Checkerboard Artifacts。