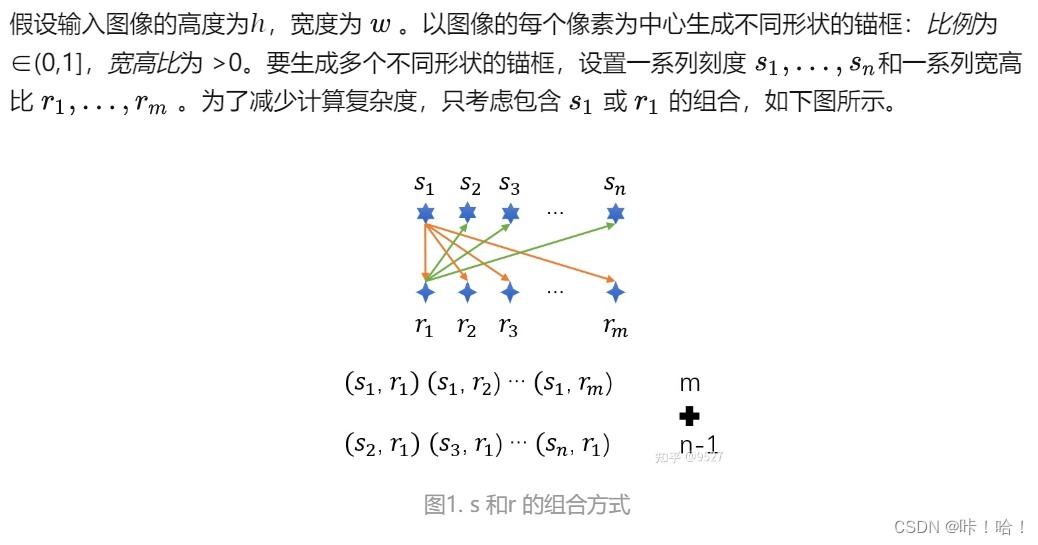
以每个像素为中心,生成多个缩放比(scale)和宽高比(aspect ratio)不同的边界框。 这些边界框被称为锚框(anchor box)。 ---- 《动手学深度学习v2》
为什么要这样做?
当使用缩放比和宽高比的所有组合以每个像素为中心时,输入图像将总共拥有whnm个锚框。这种情况下计算复杂性很容易过高。
而采用了以上方法只会生成wh*(n+m-1)个锚框,减少了计算量。
简单来说就是锚框太多,没有必要,所以去掉一些。
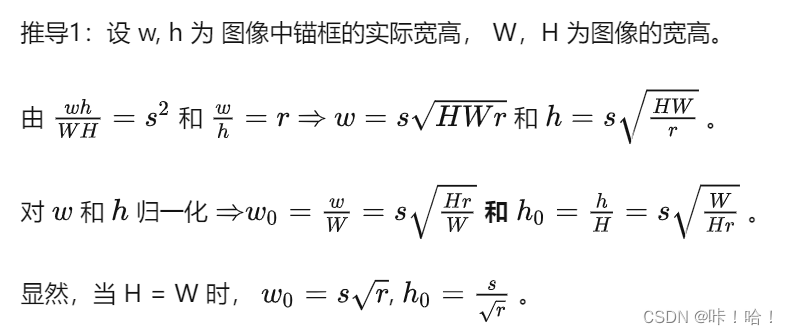
为什么使用归一化的w_0,h_0?
绝对坐标的表示方式,是以原始图像的像素值为基础的,这就需要知道图像的实际尺度,如果图像进行缩放,这种表示就无法准确的进行定位了。
坐标进行归一化,这样只要知道图像的scale就能够很容易在当前尺度下使用矩形框定位。
import torch
'''
输入参数:
data:需要进行锚框的图片,形状为(batch_size, channel_num, h, w),其中 batch_size代表图片数量,channel_num代表图片通道数,
h代表图片的高,w代表图片的宽
sizes:缩放比,以标量、元组、列表形式均可(一般缩放比都具有多个)
ratios:宽高比,以标量、元组、列表形式均可(一般宽高比都具有多个)
返回值:形状为(batch_size, anchors_num, 4);其中anchors_num代表锚框总数量,对该维度下标[0,n+m-1),[n+m-1, 2n+2m-2)表示第二个像
素中心的锚框,... ,[anchors_num-n-m+1, anchors_num)表示最后一个像素中心对应的锚框;最后一个维度4表示用方法1来进行表示的锚框。
'''
def multibox_prior(data, sizes, ratios):
"""生成以每个像素为中心具有不同形状的锚框"""
in_height, in_width = data.shape[-2:]
device, num_sizes, num_ratios = data.device, len(sizes), len(ratios) # 3, 3
boxes_per_pixel = (num_sizes + num_ratios - 1) # 每个像素的锚框数
size_tensor = torch.tensor(sizes, device=device) # list 转为 tensor
ratio_tensor = torch.tensor(ratios, device=device)
# 为了将锚点移动到像素的中心,需要设置偏移量。
# 因为一个像素的的高为1且宽为1,我们选择偏移我们的中心0.5
offset_h, offset_w = 0.5, 0.5
steps_h = 1.0 / in_height # 在y轴上缩放步长
steps_w = 1.0 / in_width # 在x轴上缩放步长
# 生成锚框的所有中心点
center_h = (torch.arange(in_height, device=device) + offset_h) * steps_h
center_w = (torch.arange(in_width, device=device) + offset_w) * steps_w
shift_y, shift_x = torch.meshgrid(center_h, center_w) # 生成网格
shift_y, shift_x = shift_y.reshape(-1), shift_x.reshape(-1) # 展平为一维
# 生成“boxes_per_pixel”个高和宽,
# 之后用于创建锚框的四角坐标(xmin,xmax,ymin,ymax)
## 动手学深度学习V2 原始代码
# w = torch.cat((size_tensor * torch.sqrt(ratio_tensor[0]),
# sizes[0] * torch.sqrt(ratio_tensor[1:])))\
# * in_height / in_width # 处理矩形输入
# h = torch.cat((size_tensor / torch.sqrt(ratio_tensor[0]),
# sizes[0] / torch.sqrt(ratio_tensor[1:])))
# # 除以2来获得半高和半宽
# anchor_manipulations = torch.stack((-w, -h, w, h)).T.repeat(
# in_height * in_width, 1) / 2
## 更新后的代码
w_0 = torch.cat((sizes[0] * torch.sqrt(in_height * ratio_tensor[:] / in_width),
size_tensor[1:] * torch.sqrt(in_height * ratio_tensor[0] / in_width))) # 归一化后的宽
h_0 = torch.cat((sizes[0] * torch.sqrt(in_width / ratio_tensor[:] / in_height),
size_tensor[1:] * torch.sqrt(in_width / ratio_tensor[0] / in_height))) # 归一化后的高
# 除以2来获得半高和半宽(因为后续想获得左上角和右下角的坐标)
'''
torch.stack((-w_0, -h_0, w_0, h_0)).T
如果不转置:
[[-w_0,-w_0,...,-w_0],
[-h_0,-h_0,...,-h_0],
[w_0,w_0,...,w_0],
[h_0,h_0,...,h_0]]
转置后:
[[-w_0, -h_0, w_0, h_0],
[-w_0, -h_0, w_0, h_0],
...
[-w_0, -h_0, w_0, h_0]]
repeat不同于repeat_interleave,repeat是整块整块重复的
'''
anchor_manipulations = torch.stack((-w_0, -h_0, w_0, h_0)).T.repeat(
in_height * in_width, 1) / 2
'''
torch.stack([shift_x, shift_y, shift_x, shift_y],dim=1)
由于shift_x、shift_y都是一维的,又由于dim=1,那么上面这句代码就相当于给接上后再转置
例如:
shift_x=[x1,x2,x3]
shift_y=[y1,y2,y3]
那么接上后为:[shift_x, shift_y, shift_x, shift_y]为:
[[x1,x2,x3],
[y1,y2,y3],
[x1,x2,x3],
[y1,y2,y3]]
转置后为:
[[x1,y1,x1,y1],
[x2,y2,x2,y2],
[x3,y3,x3,y3]]
再给转置后的张量进行重复:repeat_interleave(boxes_per_pixel, dim=0):
有趣的是它是这样重复的:
[[x1,y1,x1,y1],
[x1,y1,x1,y1],
[x1,y1,x1,y1],
[x2,y2,x2,y2],
[x2,y2,x2,y2],
[x2,y2,x2,y2],
[x3,y3,x3,y3],
[x3,y3,x3,y3],
[x3,y3,x3,y3]]
'''
# 每个中心点都将有“boxes_per_pixel”个锚框,
# 所以生成含所有锚框中心的网格,重复了“boxes_per_pixel”次
out_grid = torch.stack([shift_x, shift_y, shift_x, shift_y],
dim=1).repeat_interleave(boxes_per_pixel, dim=0)
'''
【注:】s为sizes中元素的个数,r为ratios中元素的个数
out_grid一行会重复s+r-1次,刚好对应anchor_manipulations中的s+r-1个框
out_grid大小为:wh*(s+r-1)
anchor_manipulations大小为:(s+r-1)*wh
'''
output = out_grid + anchor_manipulations # output结果包含了左上角的坐标(前两个元素),右下角的坐标(后两个元素)
return output.unsqueeze(0)