1 开启小觅相机(安装好相机的SDK,按照官网安装)
make init
make ros
注意,发现一个Bug 我的相机不能在ROS中启动,最终换了一个usb口,因为我的电脑如果有两个USB口,好像一般只会从第一个里面读数据,所以相机无法启动。
source ./wrappers/ros/devel/setup.bash
roslaunch mynteye_wrapper_d display.launch
2 查看话题
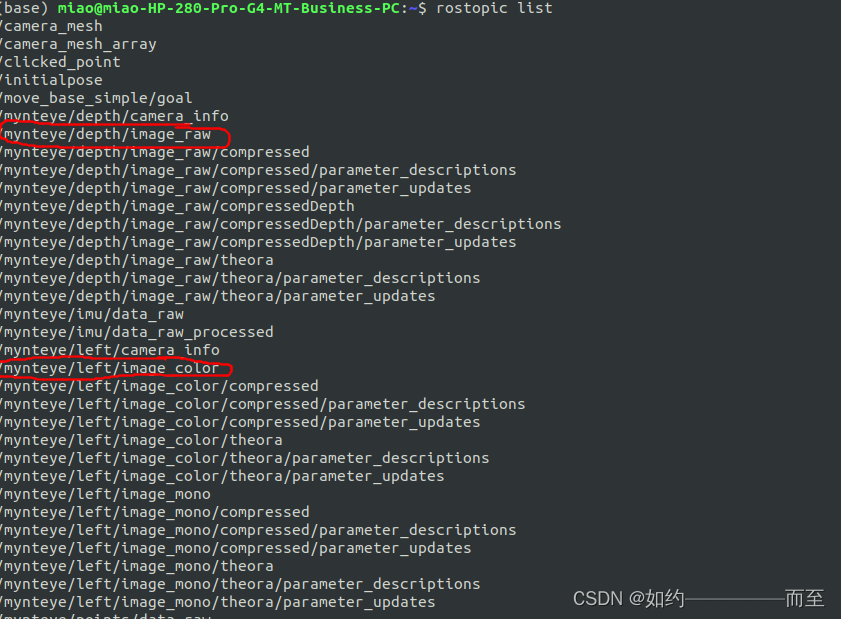
rostopic list
红色的圈为需要录制的指定话题,分别对应小觅相机的深度图和彩色图
3 录制话题
录制bag名称为 sequences 的 bag 包,指定话题为** /mynteye/left/image_color 和 /mynteye/depth/image_raw **
rosbag record -o sequences /mynteye/left/image_color /mynteye/depth/image_raw
按住 Ctrl+C 即可结束录制,会看到目录下生成了一个 名叫 Sequence 的 bag 文件
4 话题回放
rosbag play sequences_2021-12-06-22-34-44.bag
roscore
rviz
打开Rviz 订阅话题,即可看到刚才的录制的图像
5 BUG 记录
我用相机录制的时候,应该在launch 文件将 分辨率改为640480的。 不然的话 靠生成数据集的代码强行转换为640480,会导致内参不对。