计算机图形学 | 有趣的测试和合并——片元操作
华中科技大学《计算机图形学》课程
MOOC地址:计算机图形学(HUST)
计算机图形学 | 有趣的测试和合并——片元操作
10.1 再看片元操作
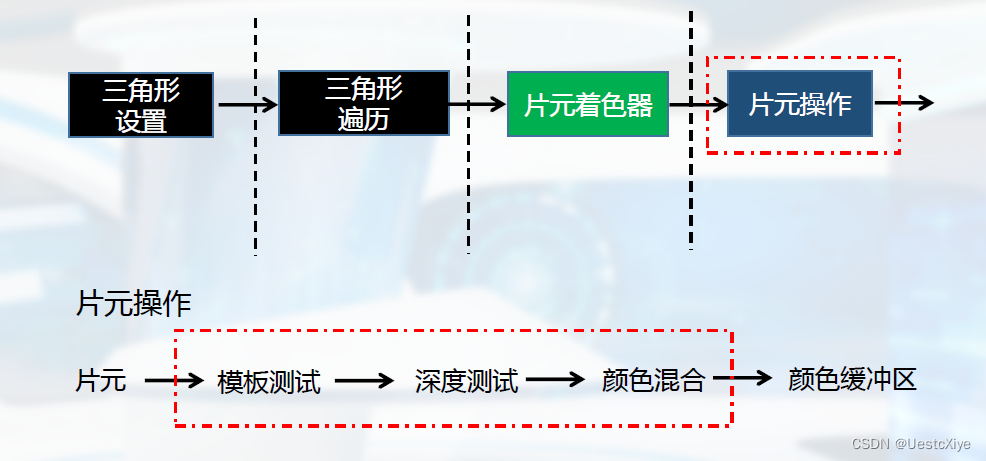
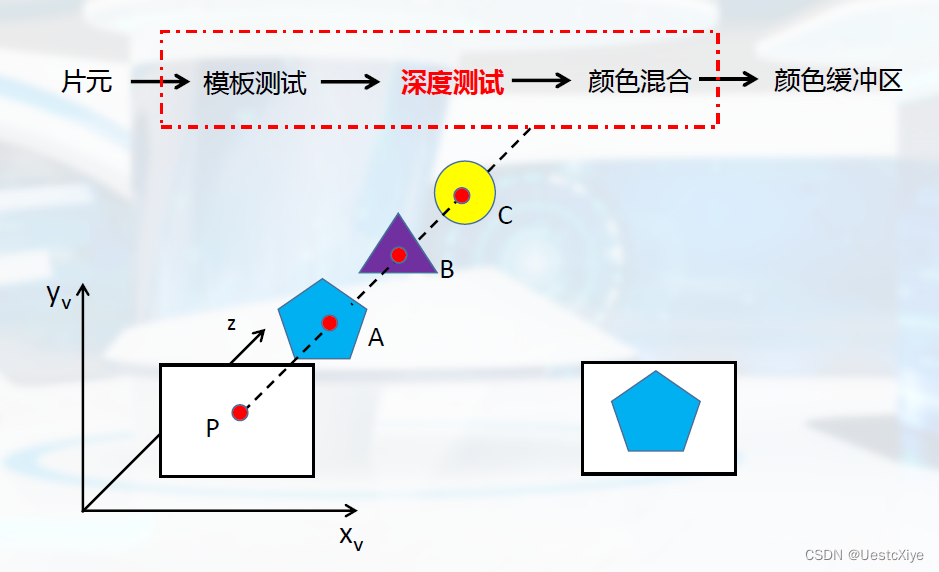
片元操作
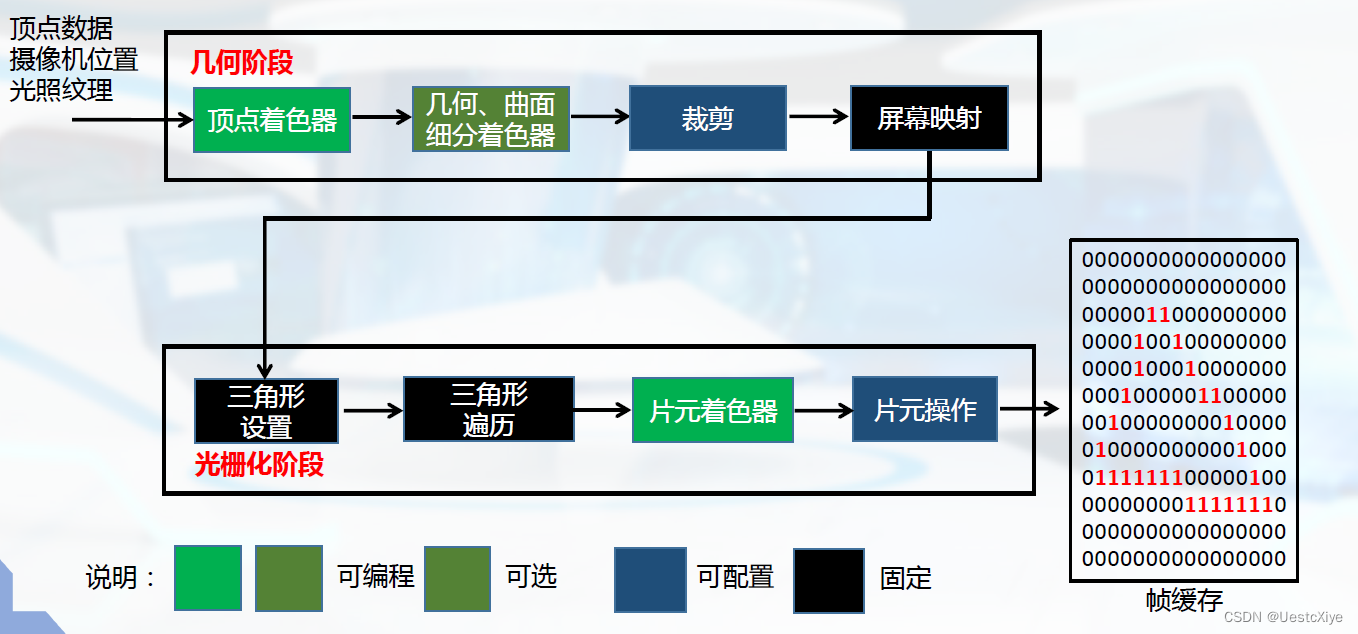
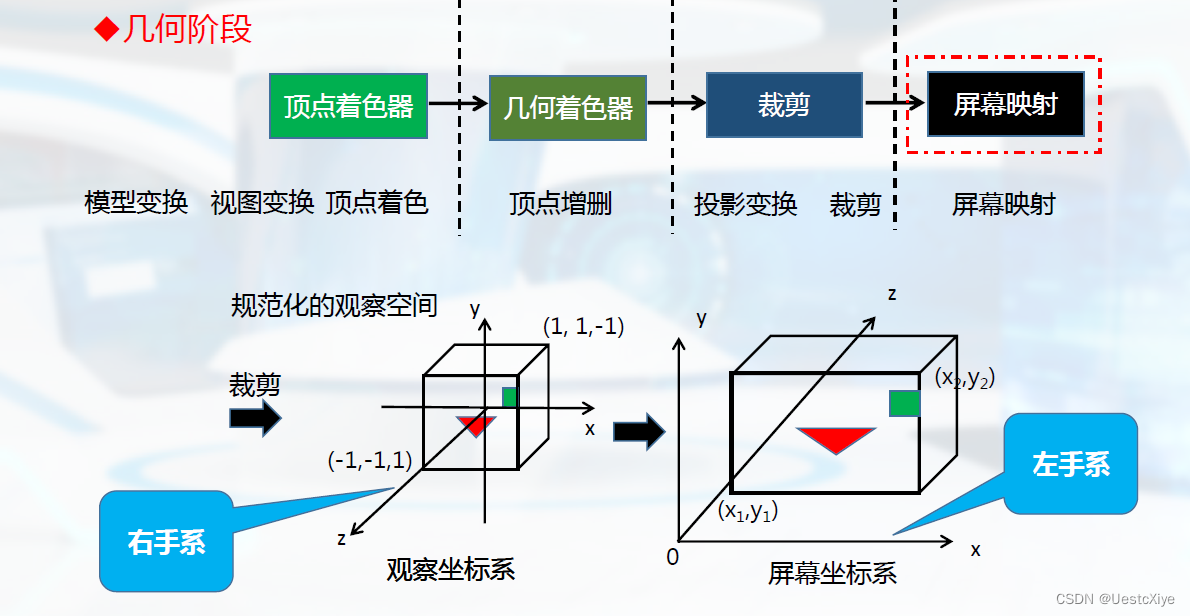
几何阶段:
光栅化阶段:
几个重要的缓冲区
- 颜色缓存(Color Buffer/Pixel Buffer):颜色缓存存储每个像素点的颜色值。
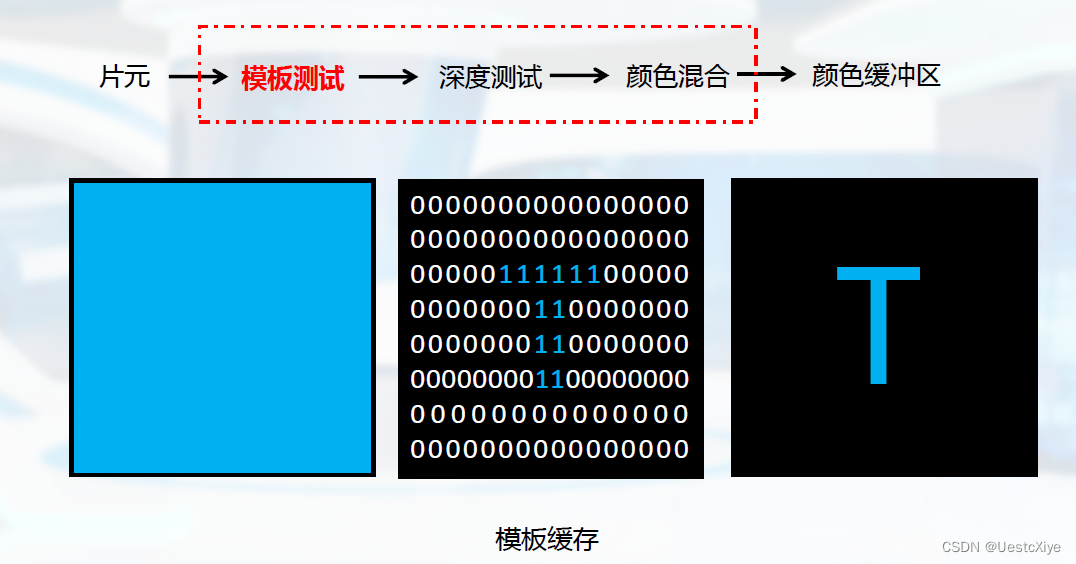
- 模板缓存(Stencil Buffer):模板缓存存储了一个模板,比如可以设定模板上对应点为1的像素点才会被显示出来。
- 深度缓存(Depth Buffer):深度缓存存储每个像素点的深度信息,也就是Z坐标值。深度值规范到0.0~1.0之间。
- 累计缓存(AccumulationBuffer):与颜色缓冲类似,同样储存像素点的颜色值。
用途:合成多幅图像,实现在场景中“多重曝光(multipleexposures)”。
方法:通过将图像渲染多次,对场景位置(戒所选的物体)进行微小的、渐增的改变,然后累积结果。
效果:提高图像的真实性,产生反走样、运动模糊(多幅有微小位移的图像的合成)等效果。
什么是颜色混合?
当A(实际上是α系数,Alpha Coeefficient)不为1.0f,即颜色有一定透明度时,可以进行颜色混合(Color Blending)。
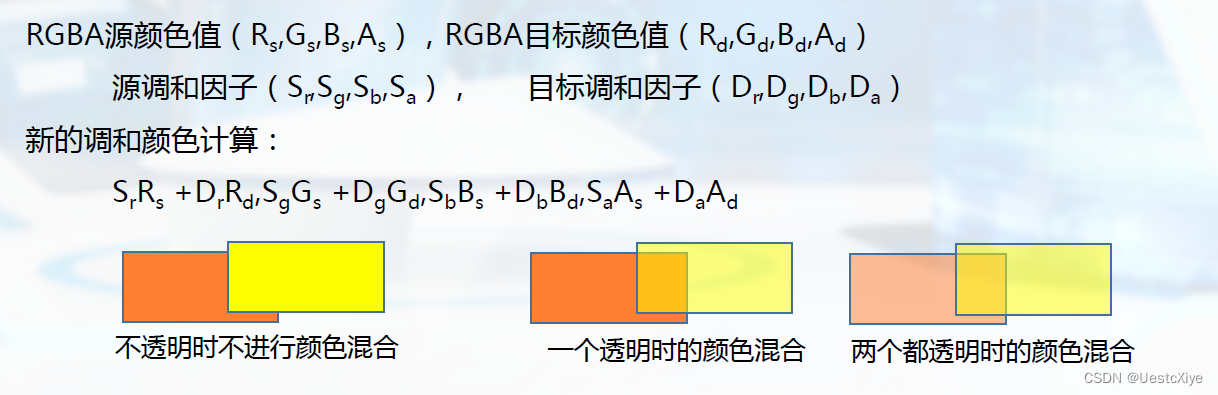
颜色混合的应用:
- 透明物体
- 处理某些特效:如运动模糊
- 处理某些特效:如泛光效果Bloom
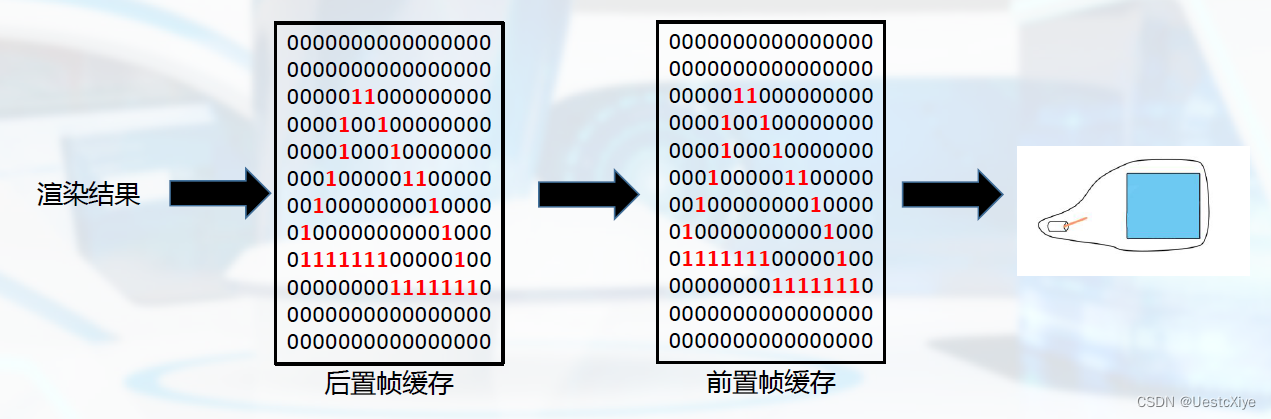
GPU的双重缓冲(Double Buffering):
10.2 谁遮住了我?
消隐的概念
消隐:决定场景中哪些物体的表面是可见的,哪些是被遮挡不可见的。
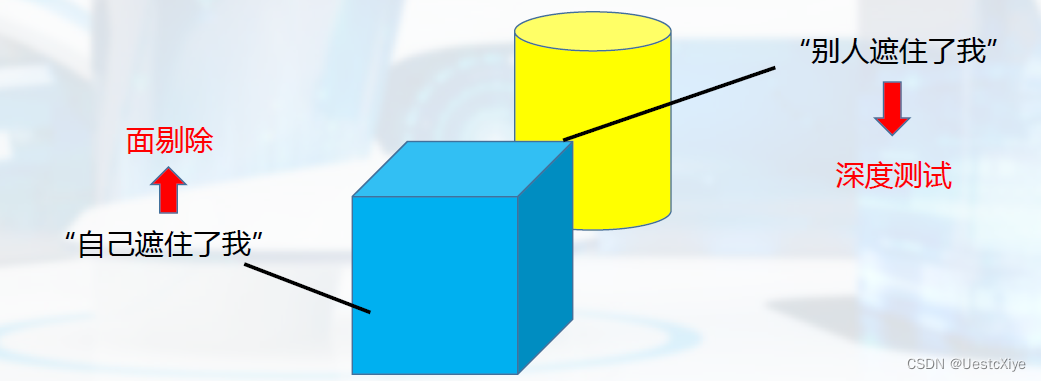
面剔除
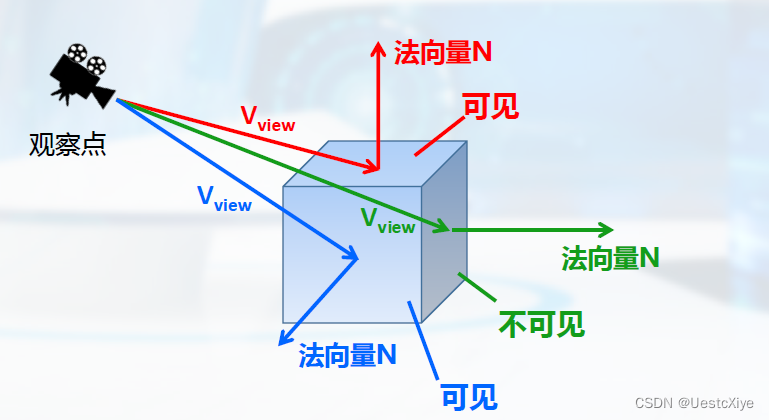
正反面的定义:
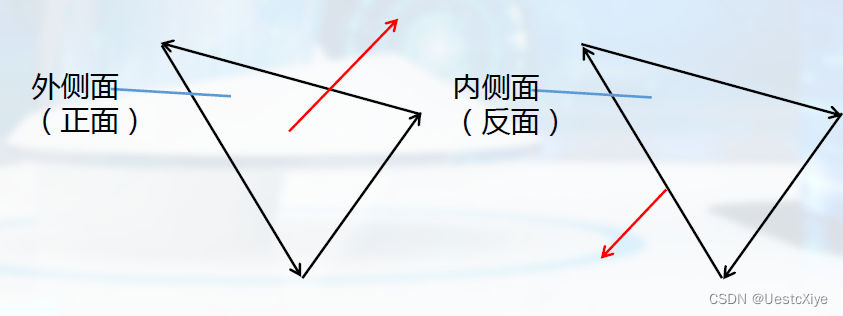
如果Vview∙N>0则该多边形为后向面,后向面是不可见的。
什么时候做面剔除?
在片元着色之前进行面剔除。
深度测试
深度缓存(Depth Buffer)存储每个片元的深度信息,也就是Z坐标值。
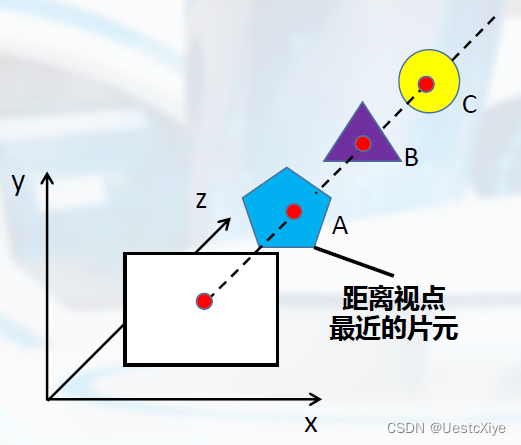
深度缓冲器算法(Z-buffer算法)
算法思想:对每个像素点找到距离视点最近的片元。
在屏幕空间中:其实是最靠近坐标屏幕的片元,也就是z值最小的片元。这个片元的颜色值就是这个像素点的颜色值。
算法步骤:
-
初始化:将深度缓存与帧缓存中的所有单元(x,y)初始化:
深度缓存中各(x,y)单元置为z的最大值1DepthBuffer(x,y )= 1
帧缓存中各(x,y)单元颜色值置为背景色FrameBuffer(x,y )= BackgroudColor -
处理场景中的每一多边形,每次一个:
计算多边形的上各点(x,y)的深度值z若z<depthBuff(x,y)则depthBuff (x,y) = z;
取得该多边形表面的颜色值surfColor (x,y);
frameBuff (x,y) = surfColor (x,y)
深度排序算法(depth sorting method)
深度排序算法(depth sorting method),又叫画家算法(painter’s algorithm)。
思想:画家在创作一幅油画时,总是先画背景,然后画较远处的场景,然后是近一点的物体,最后画最近的景物。
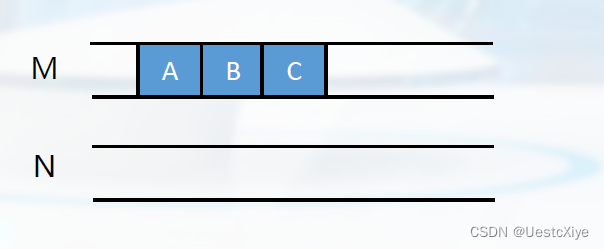
数据结构:
- 多边形队列M:存储所有多边形
- 优先级队列N:深度排序得到的结果,按优先级存放所有多边形
算法步骤:
- 深度排序:将多边形按深度优先级进行排序,结果存入队列N中
距视点近的优先级高,距视点远的优先级低。 - 扫描转换:从队列N中逐个取出多边形进行绘制
其实就是由优先级低的多边形开始,逐个对多边形进行扫描转换。
深度排序
Step 1.初始化
将场景中的所有多边形按zmax由大到小的顺序存入一个先进先出队列中,记为M;
同时初始化一空的先进先出队列N。
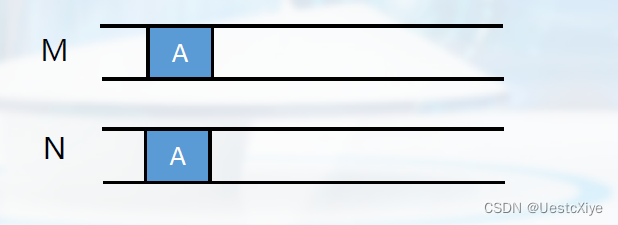
Step 2.只有一个多边形
若M中的多边形个数为1,则将M中的多边形直接加入到N中,同时将A从M中删除。
Step 3.有多个多边形
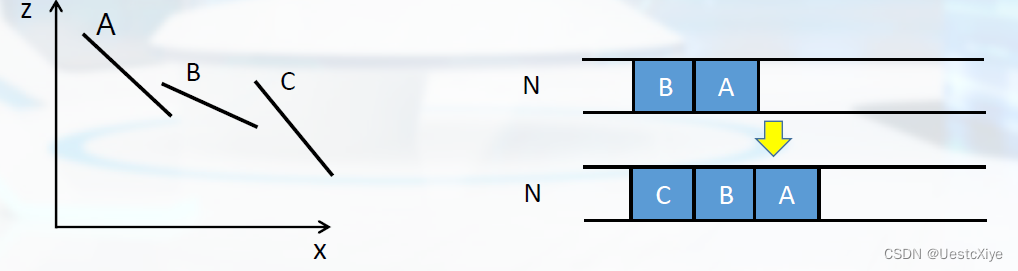
从当前M取出多边形B,对A与B进行判别:
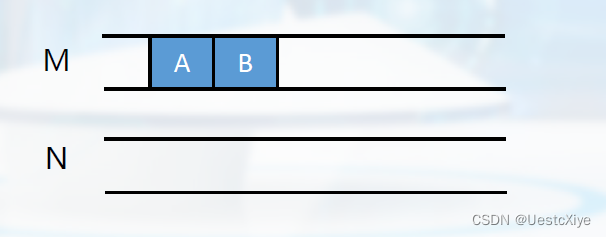
情况1:若对M中任意的B均有zmax(B)<zmin(A),则说明A是M中所有多边形中深度最深的,它与其它多边形在深度方向上无任何重叠,不会遮挡别的多边形。将A按先进先出原则加入N中。

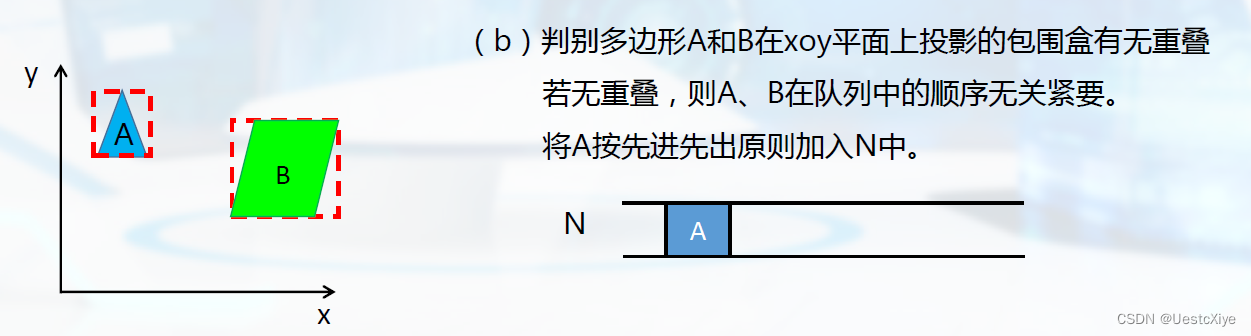
情况2:判别多边形A和B在xoy平面上投影的包围盒有无重叠。若无重叠,则A、B在队列中的顺序无关紧要。将A按先进先出原则加入N中。
情况3:判别平面A完全位于B上A与B的重叠平面之后将A按先进先出原则加入N中。

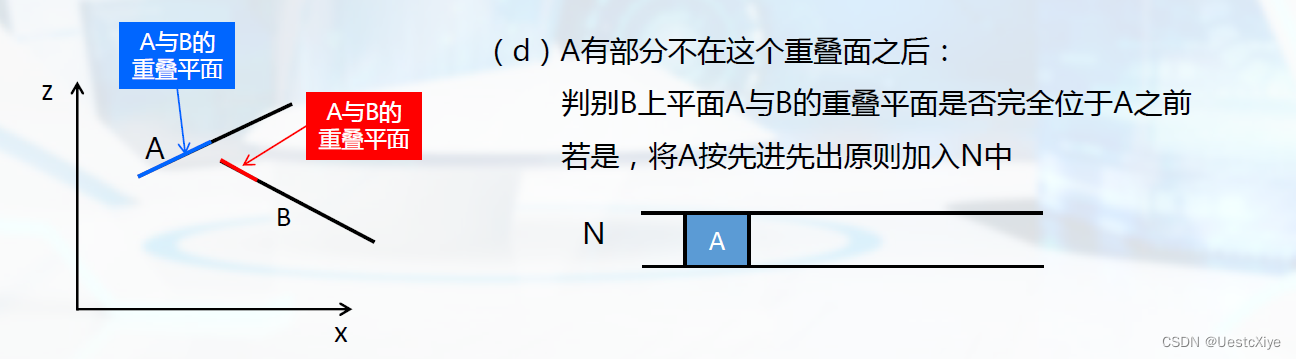
情况四:A有部分不在这个重叠面之后:判别B上平面A与B的重叠平面是否完全位于A之前。若是,将A按先进先出原则加入N中。
当A、B排好序了,继续处理其他的多边形从当前M取出多边形C:通过判别发现B遮挡了C的一部分,因此C的优先级最低。最后优先级由低到高的顺序为C、B和A。
扫描转换
从N中按照优先级顺序取出多边形进行绘制。

OpenGL中的消隐
面剔除
OpenGL中可以开启多边形剔除。
如:
glEnable(GL_CULL_FACE);
// mode可以是GL_FRONT、GL_BACK、GL_FRONT_AND_BACK
glCullFace(mode);
深度测试
深度测试默认是关闭的,所以如果要启用深度测试的话,我们需要GL_DEPTH_TEST选项来启用它。
如:
glEnable(GL_DEPTH_TEST);