一、CAN总线Bus Off原理
错误的类型:
(1)暂时的数据错误(如外部干扰等)
(2)持续的数据错误(如单元内部故障、驱动器故障、断线、短路等)
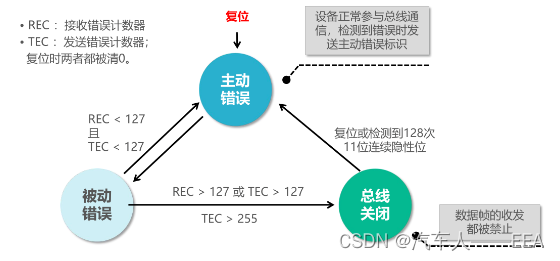
当总线上发生持续数据错误时,CAN控制器内部的错误计数器累积到总线关闭的阈值,CAN Bus Off。
二、CAN总线Bus Off原因
A.CAN线路因素:CAN_H开路、CAN_L开路、CAN_H对CAN_L短路/开路、CAN_L对VBAT短路、CAN_H对GND短路、CAN_L对GND短路、终端电阻开路等。
B.CAN控制器或收发器等元器件故障导致
C.CAN总线信号干扰(逆变产生的巨大电流形成强干扰,串扰到CAN总线上,导致控制器死机、损坏或者通讯中断,车辆运行不稳定)
(2)解决方案
A.重启CAN控制器
检查Bus Off寄存器的值,对CAN控制器的驱动及相关寄存器进行初始化操作;
通过MCU对CAN控制器总线关闭状态的恢复过程进行编程处理,以控制节点从总线关闭状态恢复到错误主动状态的等待时间。
B.重新上电
具体实施:
(1)新能源高压部件强电流产生的空间磁干扰,应该将CAN线缆双绞程度加大;(2)CAN接口设计:隔离收发器、隔离限幅,防止ECU死机;增加磁环、共模电感等效果好的感性防护器件;
(3)外接信号保护器消除干扰;
(4)使用网桥中继设备CANBridge对部分强干扰源进行隔离。