手部的控制器
首先还是按照老办法,我们通过控制器分别去控制每一根手指的三个关节。
我们建立相应的控制器骨骼。
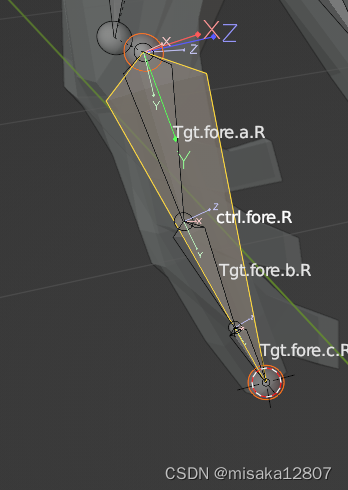
向三个指关节骨骼添加复制旋转约束,对象是新建的拇指控制器骨骼。
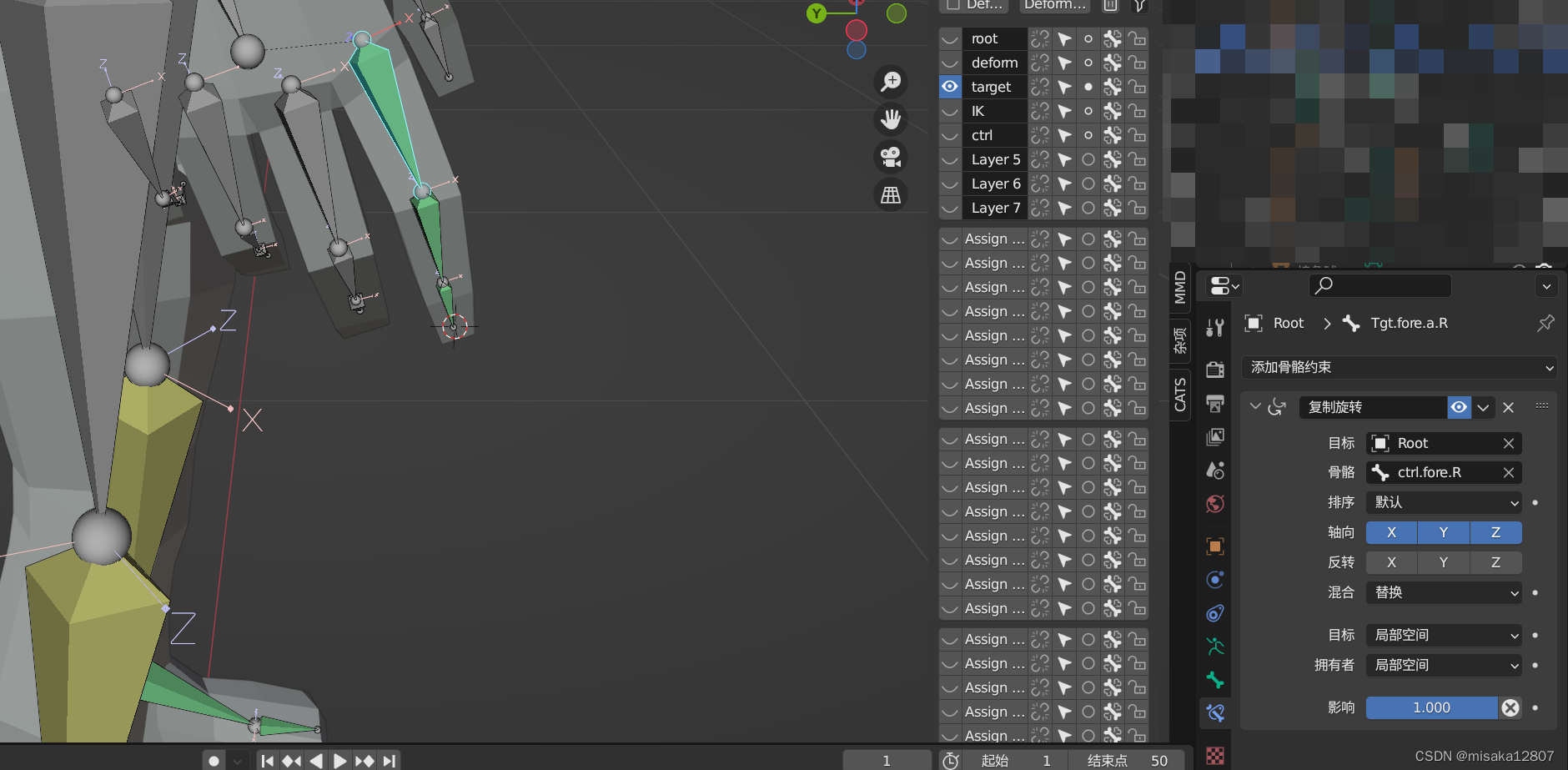
沿局部坐标旋转
注意配置问题,我们都知道通过 r + x x做围绕局部坐标的旋转,但是在面板顶栏这里需要做相应配置。
在游标为参照体系的模式下
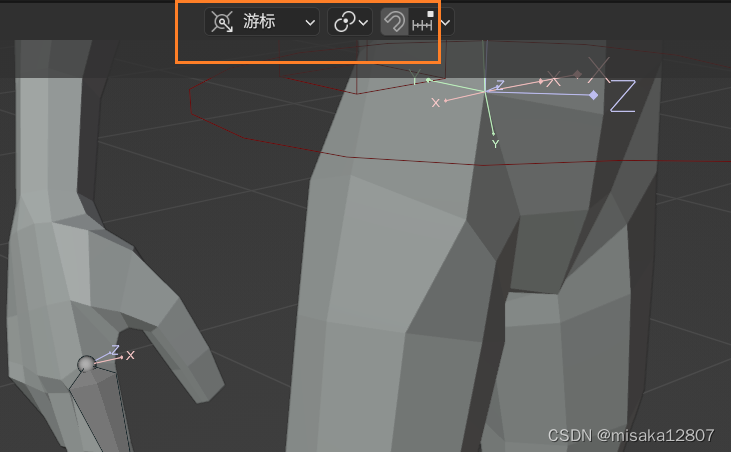
我们是无法切换到围绕局部x轴旋转的模式

更换坐标系为局部
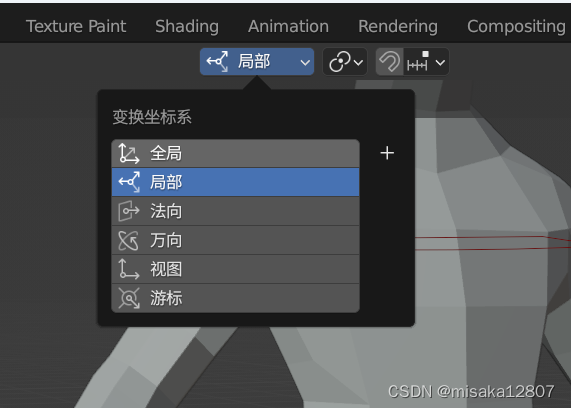
旋转的参照坐标系能够正常切换

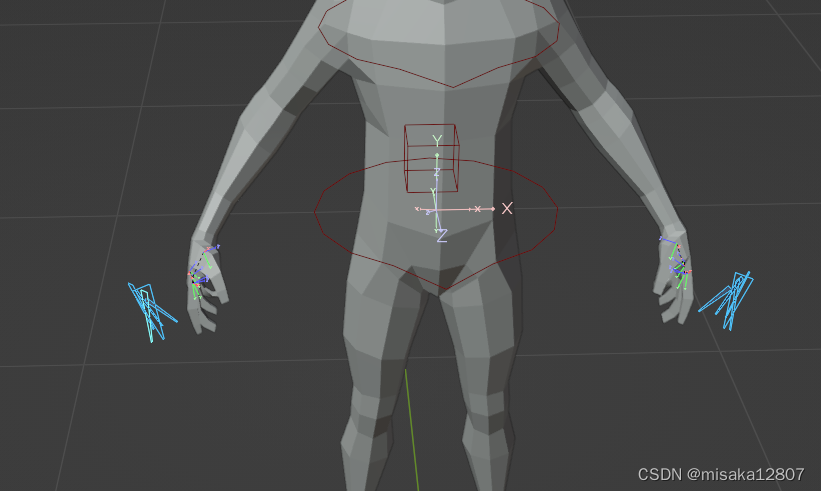
拇指围绕局部坐标进行运动。注意这里需要提前将全部指关节的x轴方向对齐。

建立全部的手部控制器骨骼,对全部右手手指关节上复制旋转的约束。


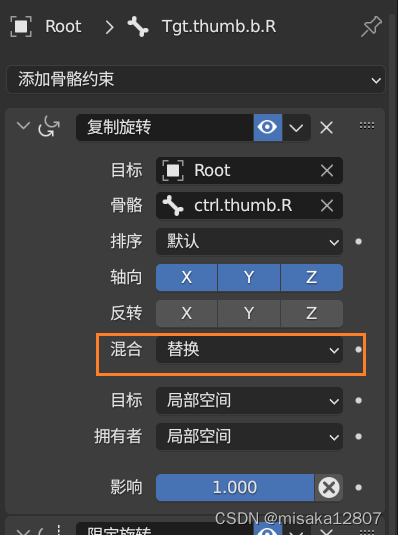
复制约束的混合模式
在默认的状态下,我们完成了复制旋转/复制位置的约束设置后,对应的骨骼就无法独立的进行旋转/位置变换了。

主要是因为在替换模式下,是由控制器的旋转参数弯曲替代对象骨骼的旋转参数。所以无法对对象骨骼进行二次单独调整。
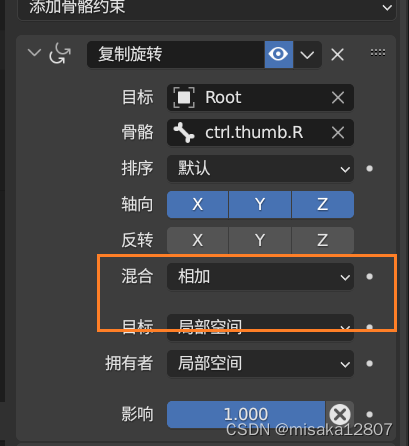
调整混合模式为相加,就可以进行独立调整。

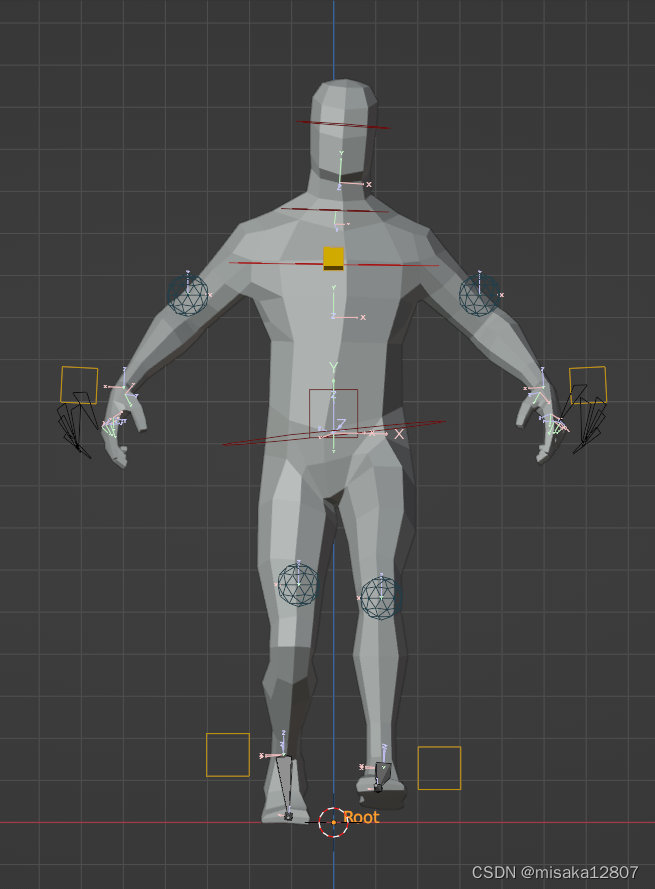
设置骨骼自定义形状

通过骨骼对称,完成左右手的控制器设置
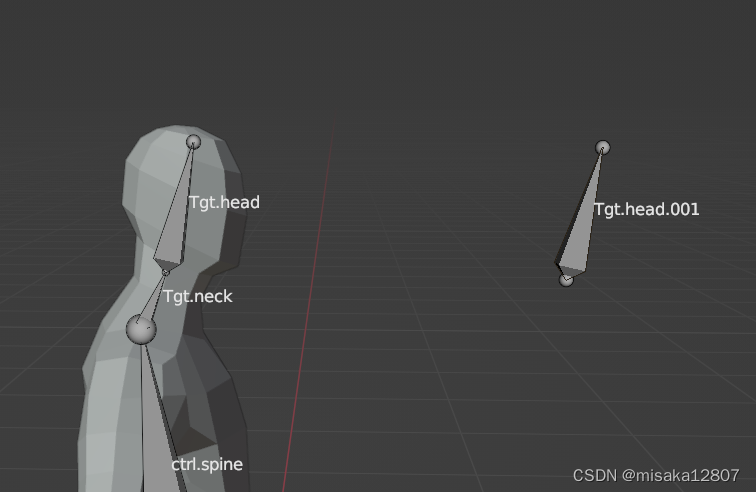
头部控制器
在控制器设计上,由于头部的骨骼相对简单。我们直接选择复用现有的两根tgt骨骼,直接挪动到控制器层,设置相应的自定义形状。


但是现在又有了新的问题,人在运动的时候往往是需要看向某目标物体的,而现在人头在运动的时候头也会跟着乱晃,头的视线方向无法看准一个方向。

通过阻尼跟踪实现视线对准
首先我们复制头部的骨骼,清除父子级关系并重命名为(视线)瞄准控制器。为了更好体现效果,我们先把瞄准控制器放近一些。
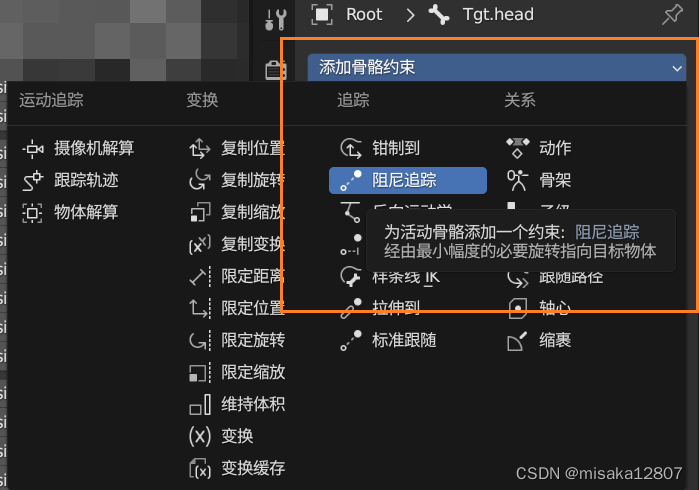
另,为了方便进行移动,请将瞄准控制器的坐标系与世界坐标系拉齐。
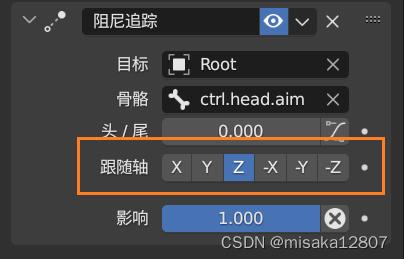
姿势模式下,添加阻尼跟踪约束。
关于跟踪轴问题,取决于当前头部骨骼,正对于瞄准控制器的轴是哪一个,选择对应跟踪轴即可。
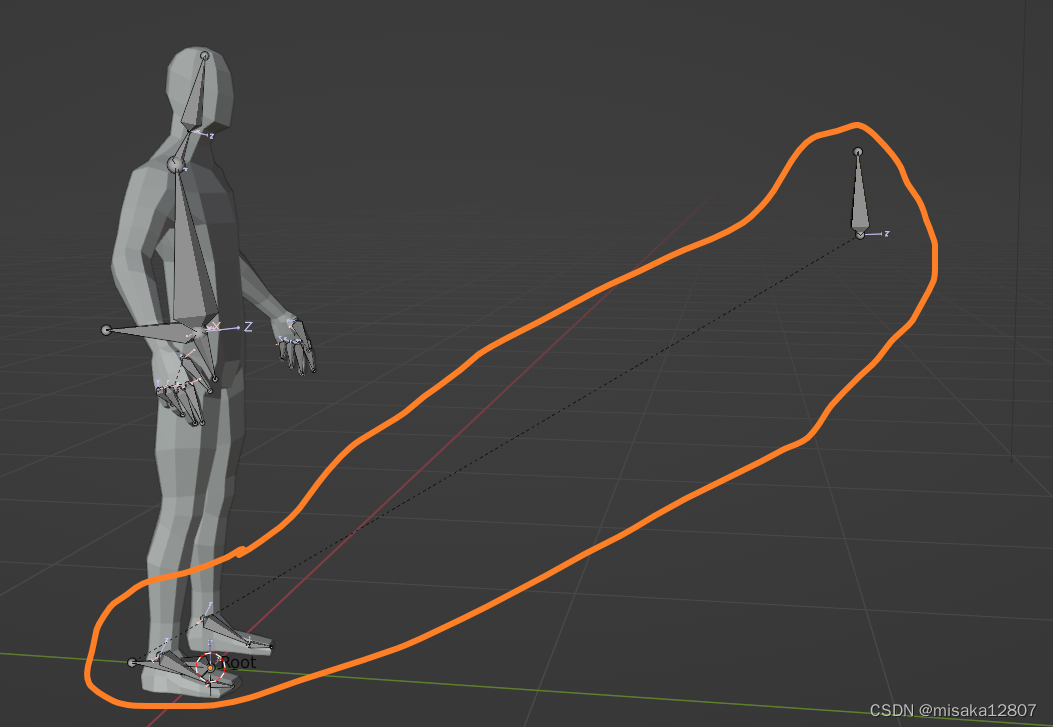
绑定完后我们可以看到随着瞄准控制器的移动,头部可以跟随进行转动了。即在控制器位置固定的情况下,随着身体的位置变化,头部还是会自动旋转从而对准瞄准控制器的位置。


但由于骨骼对齐控制器的位置实际上是骨骼的根部,所以实际上要做到眼睛看准的效果,控制器的位置往往要下移一些。

最后注意为了方便做root动画,我们记得把瞄准控制器绑定root骨骼的父子级。
制作走路的K动画
在全部控制器设置完成后,我们干脆来练练手,做一个走路动作的k动画。
之所以叫k动画,主要是因为动画的制作逻辑实际上并不是每一帧每一帧来做的,而是通过设置关键帧(key frame),而软件会自动计算关键帧间骨骼/控制器的差异,从而补齐关键帧之间每一帧的动作(要是2d动画的中割有这么方便就牛逼了)。
当然熟练的3d动作应该是对运动规律,镜头感等的知识体系都相当的熟悉,我们就随性一点做一个简单的即可。
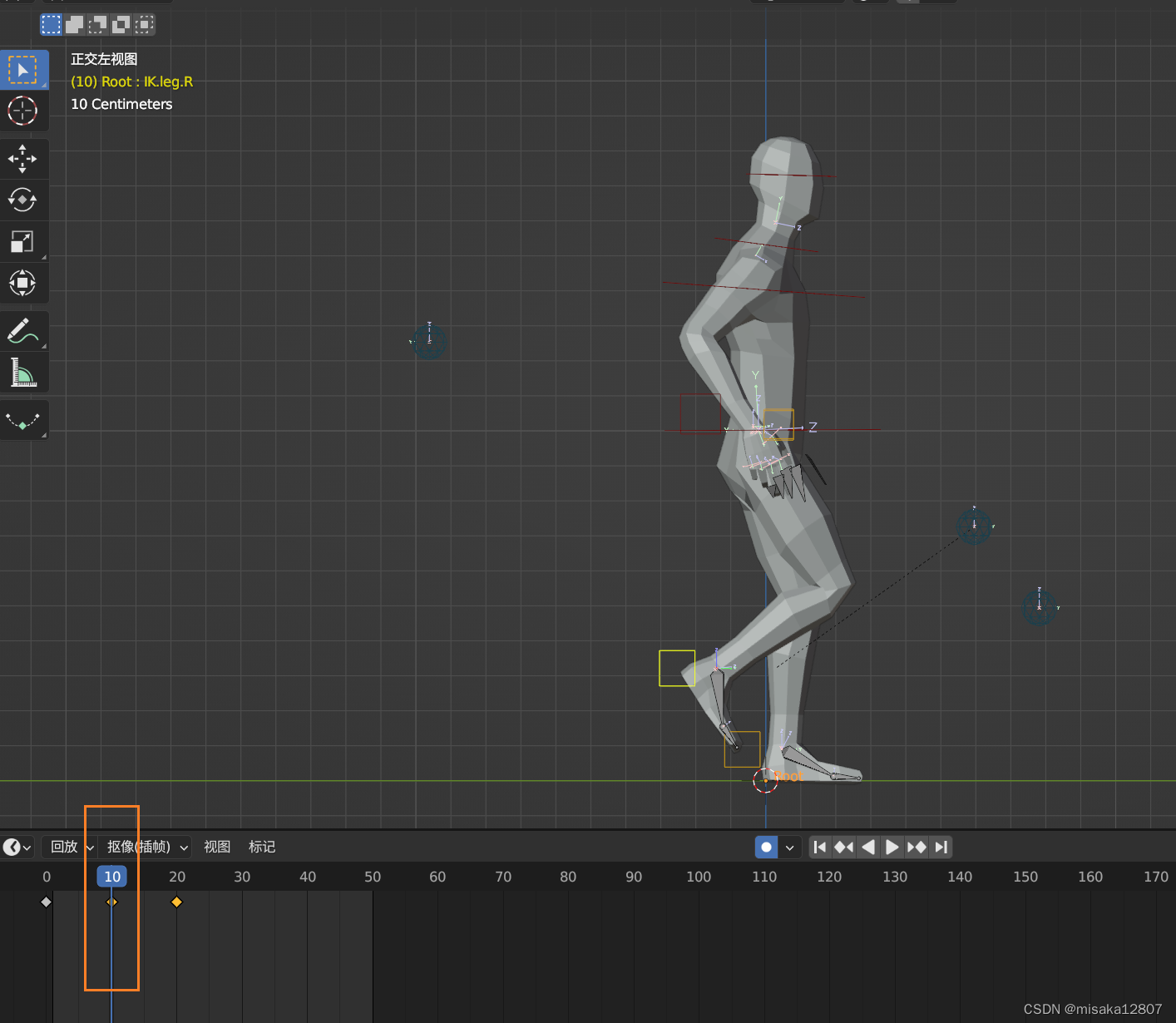
首先我们点选两个手部的IK控制器,原位-移动后-归位(复制原位),快捷键i共插入3个关键帧。
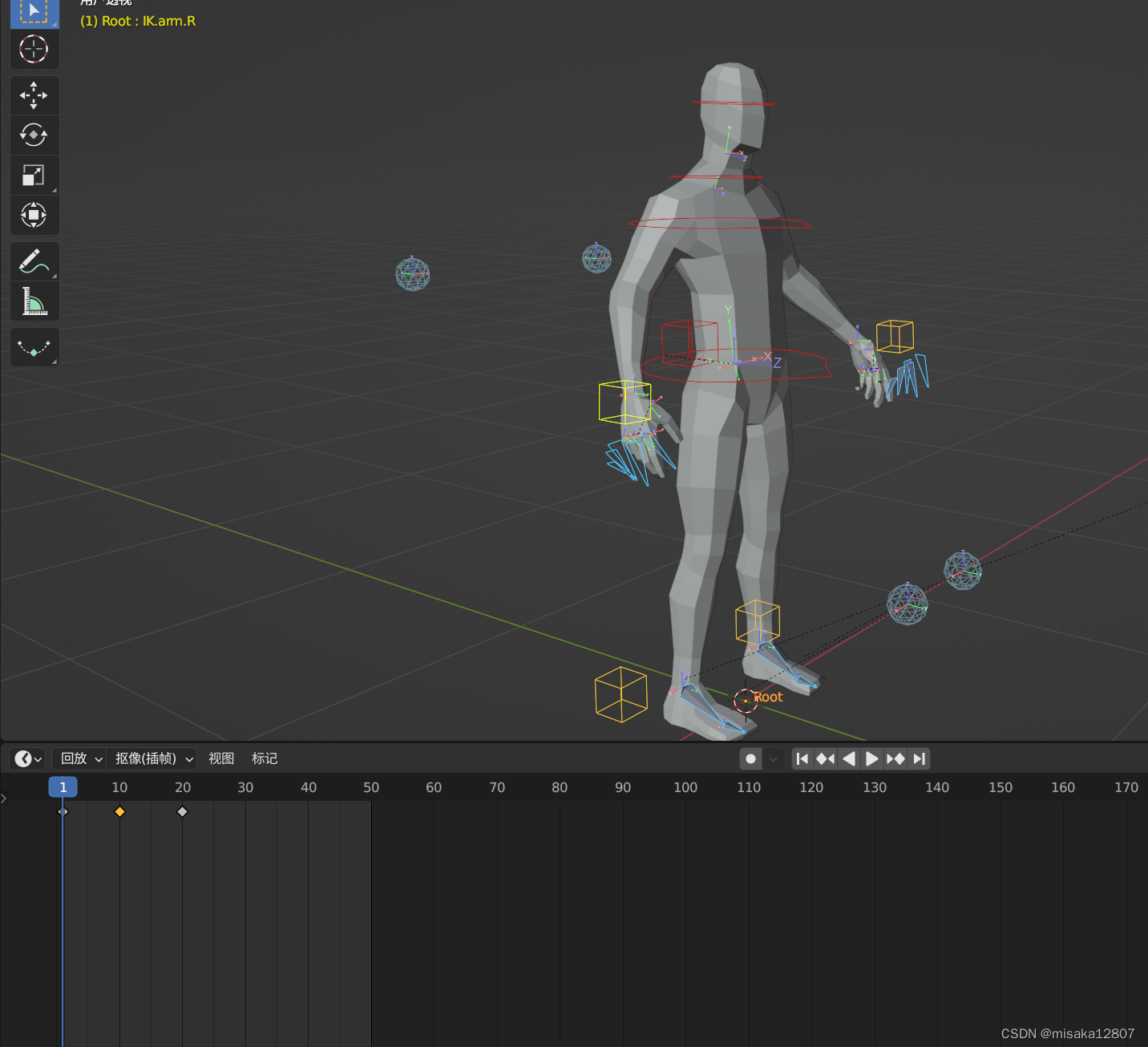
注意只有在动作模式下,点选对应的骨骼,时间轴上才会显示关键帧。

播放动画,可以看到blender自动生成了关键帧之间的一系列动作。

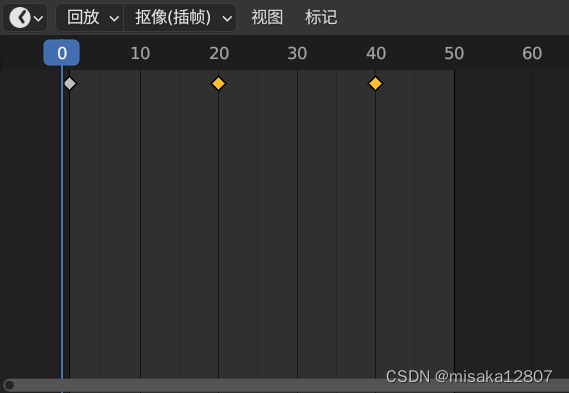
选择指定关键帧,可以在时间轴上拖动,从而加快/放慢动作流程。这里我们把对应的帧拖动到20/40秒,实现了整个动作的放慢。

当然每次都做手k实在是过于麻烦,我们可以选择使用自动k的方法。系统只要检测到骨骼的变换发生变化,就会自动完成当前帧的k帧(关键帧)。
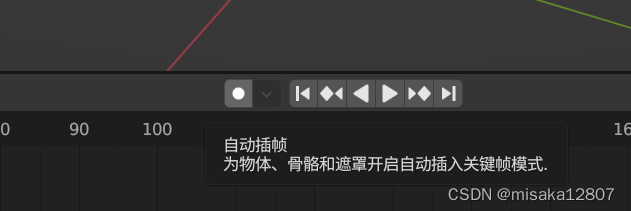
可以看到在完成变换的瞬间,下方的时间轴第40帧的地方就自动插入了k帧。

那么接下来我们正式开始做这个动画。
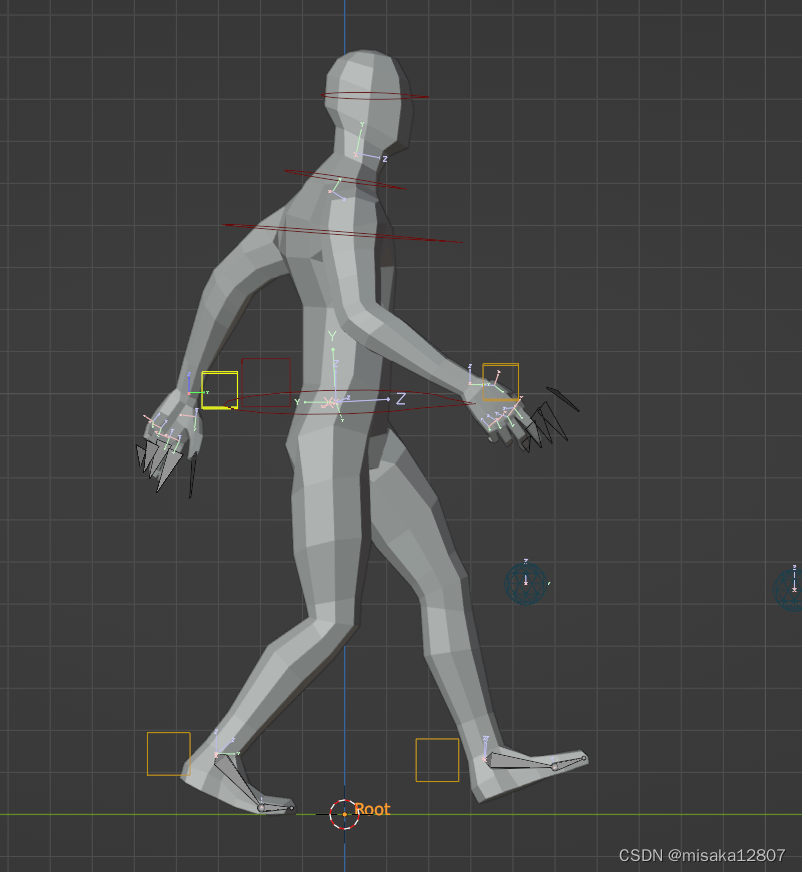
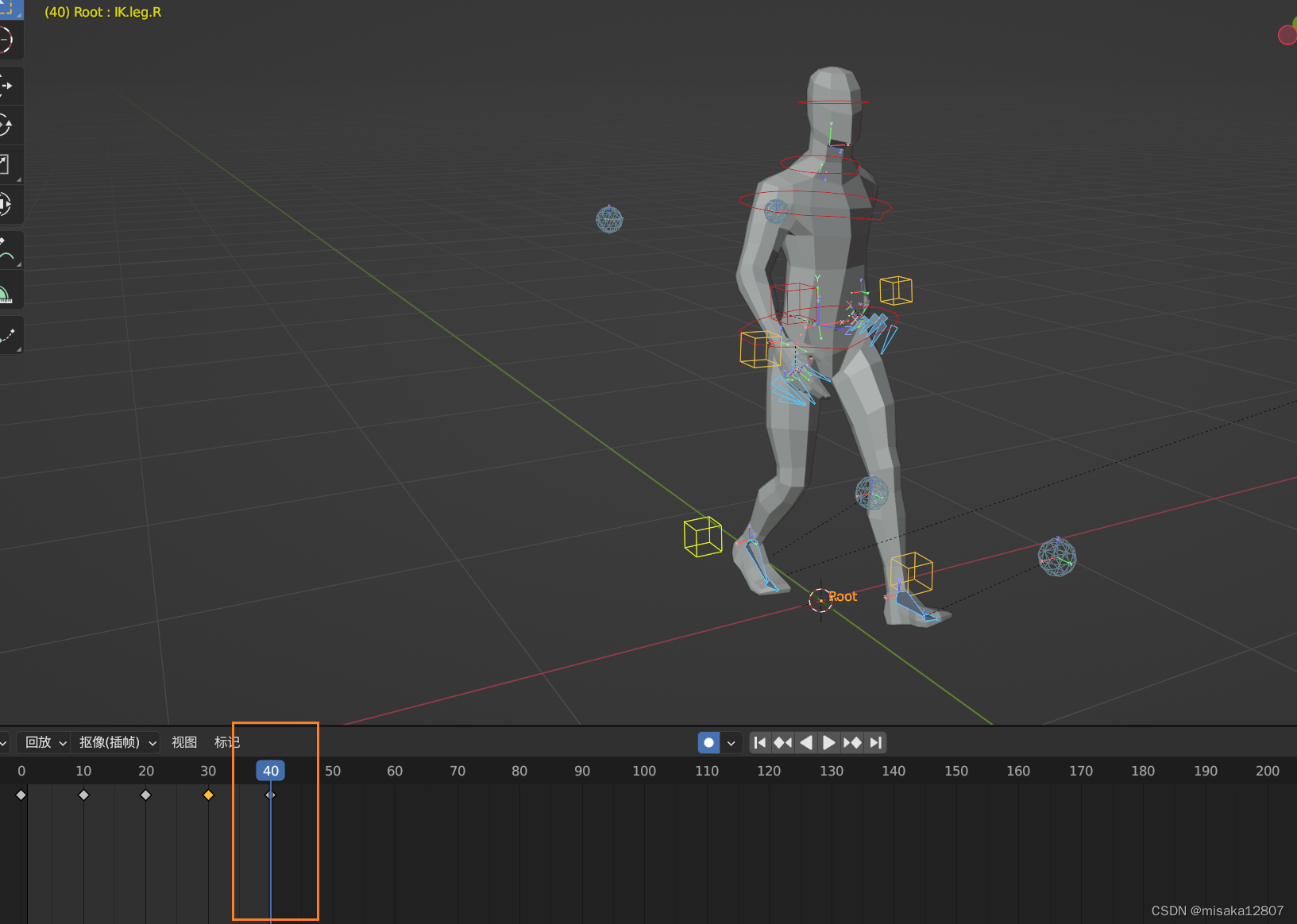
首先我们开始做的一个关键帧。我们在多个视角下完善,调整动作。
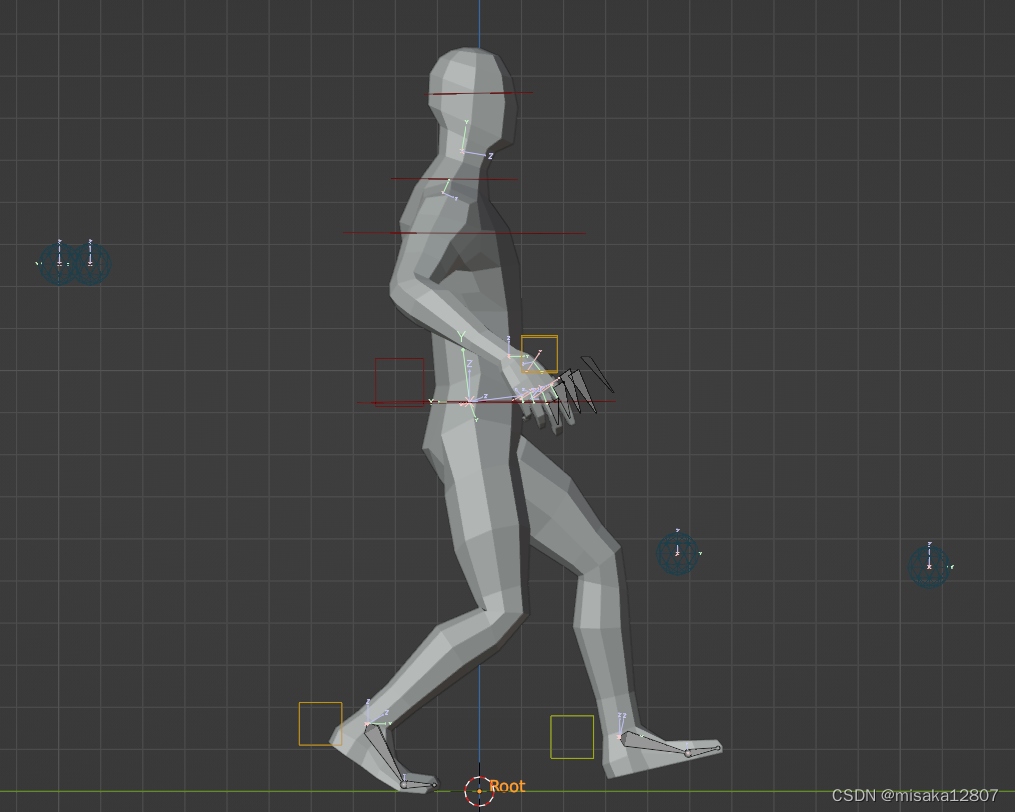
两只脚相对内收,躯干的上下半略微旋转做出差异。
侧面再次调整脊柱姿势,调整手的位置。同样是侧面和正面,两个角度进行调整,侧面摆出姿势,正面向内调整,避免大鹏展翅式大开大合的摆手。
接下来我们全选全部骨骼,在第二十帧的地方通过复制插入关键帧。
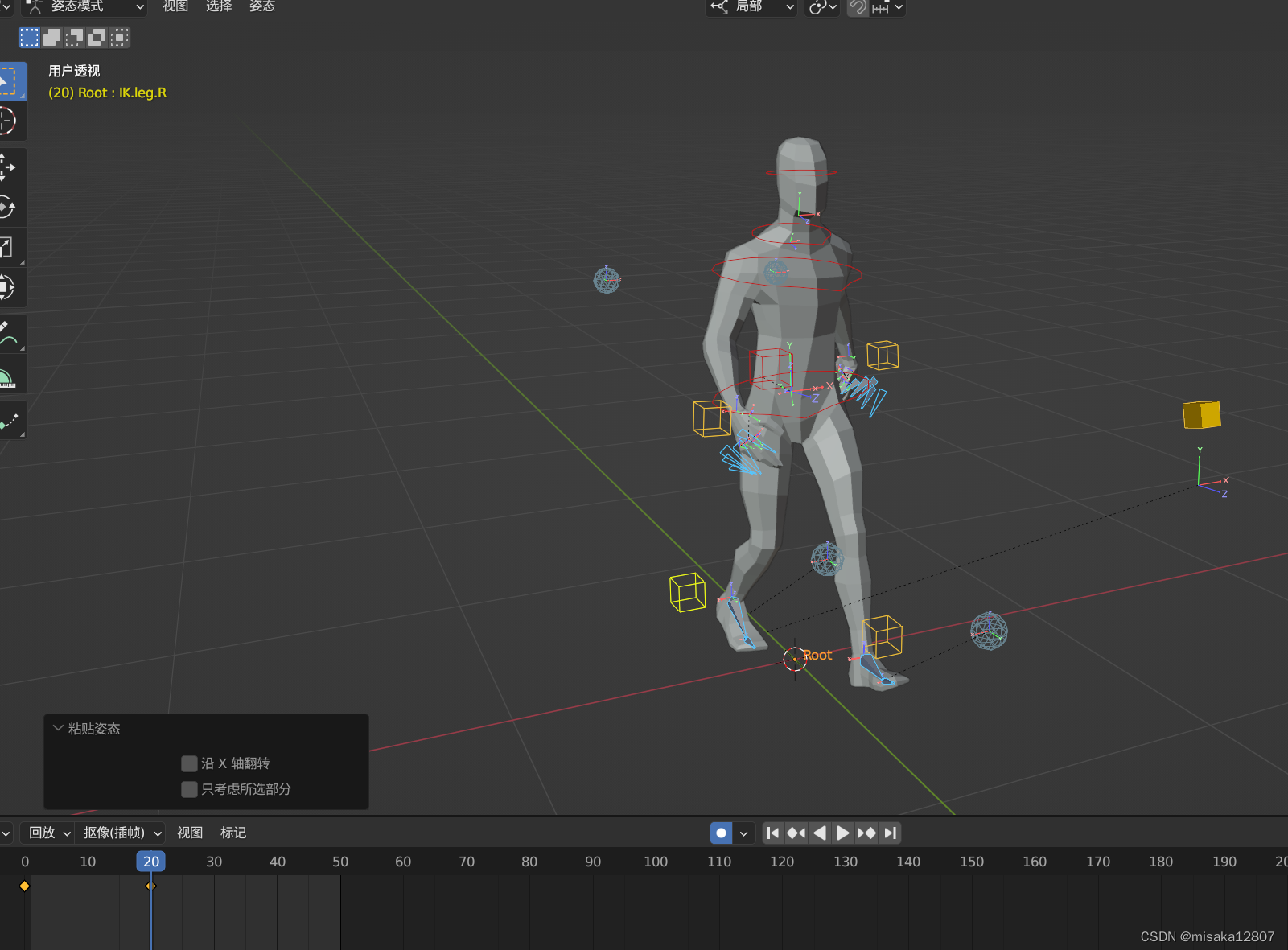
在复制动作的同时实现对称翻转
考虑到走路的过程中左右手左右脚的依次运动,其实是实现了一个对称动作,blender这边也提供了一种对称翻转的复制模式。我们通过CTRL C + CTRL SHIFT V实现姿势的对称复制。
通过对称复制动作,建立关键帧。我们就得到了最初始的走路动作。

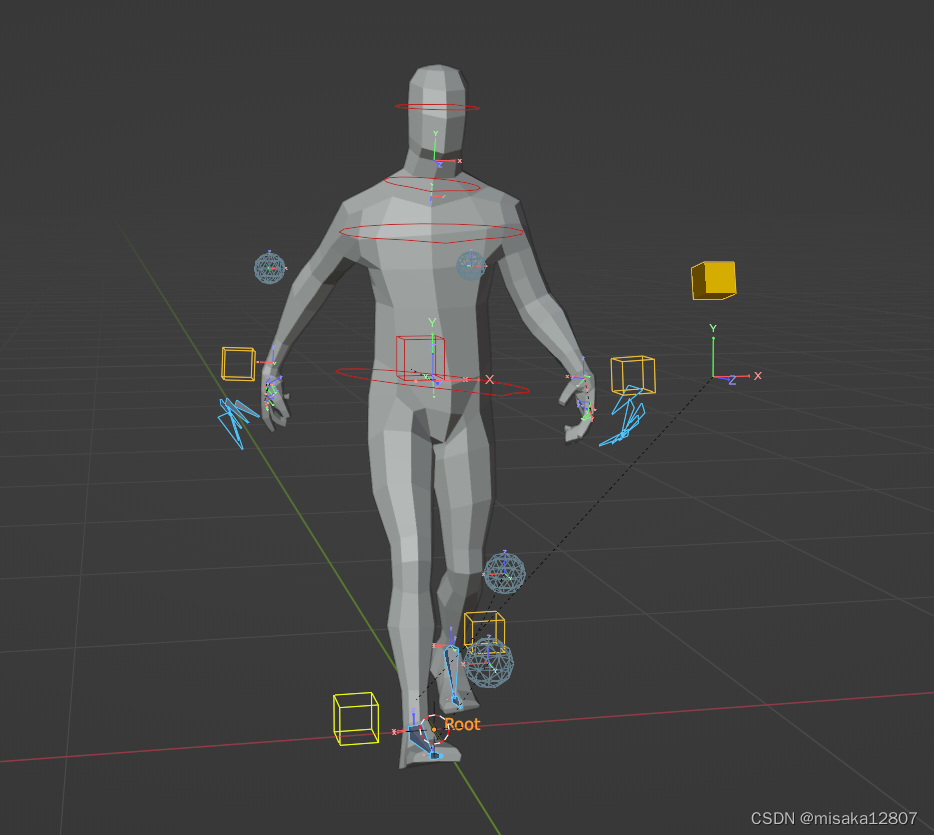
当然复杂的东西全靠自动算还是不行的,我们能够看到在自动生成中间帧的结果中,两只脚交替的时候形成了诡异的漂浮状态,形成一种奇怪的打滑感。

这里就涉及到算法不懂运动规律的活儿了,因为在走路的运动规律种,两只脚并不是都处于触地支撑位,而是一只脚触地,一只脚抬起,处于一上一下,一前一后的状态。
所以我们需要单独告诉系统,中间脚步交替触地的关键帧要怎么做。我们直接在第十帧的位置插入新的关键帧。
彼时,由于右脚是前进脚,所以应该处于抬起状态,左脚是收回脚,此时调整其到踏地状态。
同样的,我们通过翻转复制的方式在第30帧的位置插入右脚触地的交替动作。

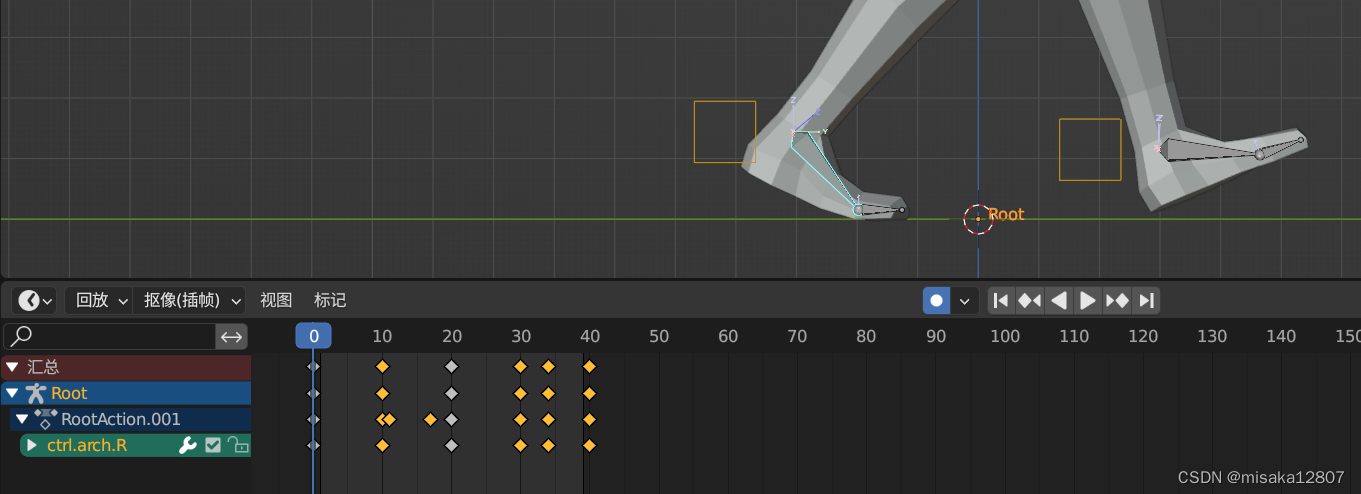
第四十帧的位置我们则复制第0帧的数据(不做翻转)
由于第一帧和最后一帧一致,我们设置循环帧为0-39帧。可以看到浅灰色部分的可见帧向前推了一帧。

基础动作的部分完成。(这里为了保证动图大小合规做了减帧,所以看起来动作很快)

右键特定骨骼,选择计算运动路径,就能看到特定骨骼在整个动作中的运动轨迹,方便进行调整。
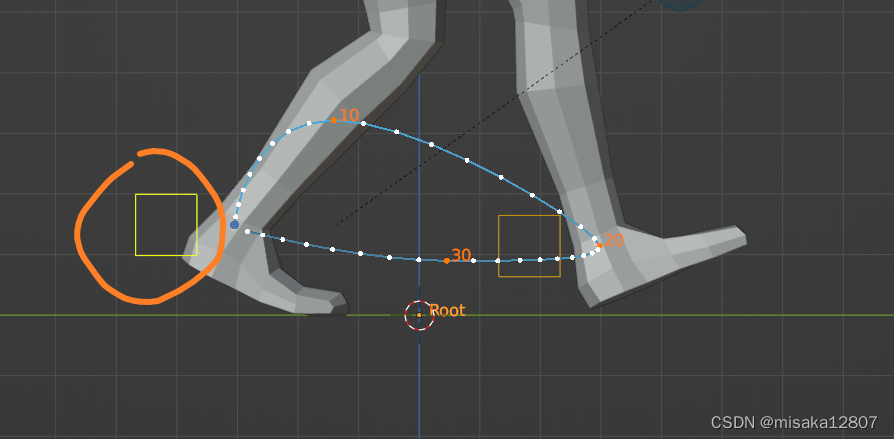

到这一步我感觉手部的摆动不是太自然,又重新做了调整。

此外,由于脚掌触地相关的中间帧出现了陷地的现象,我又把这里相关的中间帧单独处理,对脚掌的两个骨骼单独做了k帧的修正。