自定义ROS消息,编写C++ pub+sub样例,理解计算图源名称
1 资料
关于ros消息和话题的原理,参考本人的ROS高效入门博客第二章的2.5节:ROS高效入门第二章 – 基本概念和常用命令学习,基于小乌龟样例
本文是把下面两个参考资料相应的例子重写了一下,并组织成自己的目录。新手可以跟着博客,很丝滑地学会如何写ROS消息和话题的C++程序,并理解其中的原理。读者也可以直接挑选感兴趣的样例进行研究。
(1)《机器人操作系统(ROS)浅析》[美] Jason M. O’Kane 著 肖军浩 译,第3,5和6章
(2)ros Tutorials 初级教程的10~12节: ros Tutorials
2 正文
2.1 第一个ros程序,hello_ros
(1)创建hello_ros软件包
cd ~/catkin_ws/src
// hello_ros依赖std_msgs,rospy和roscpp
catkin_create_pkg hello_ros std_msgs rospy roscpp
// 创建hello.cpp和launch文件
cd hello_ros
touch src/hello.cpp
mkdir launch
touch launch/start.launch
文件树
(2)编写hello.cpp
// ros标志头文件,ros程序的标配
#include <ros/ros.h>
int main(int argc, char** argv) {
// 初始化ros节点,最后一个参考是节点名
ros::init(argc, argv, "hello_ros");
// 创建ros节点句柄,其会把节点注册到master中
ros::NodeHandle nh;
// info等级打印hello
ROS_INFO("hello ros");
return 0;
}
(3)编写CmakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(hello_ros)
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs)
// 申明catkin package
catkin_package()
include_directories(${
catkin_INCLUDE_DIRS})
add_executable(${
PROJECT_NAME}_node src/hello.cpp)
target_link_libraries(${
PROJECT_NAME}_node ${
catkin_LIBRARIES})
(4)编写launch文件
<launch>
<node
pkg="hello_ros" // package名
type="hello_ros_node" // package内,可执行程序名
name="hello_ros_node" // 节点名,如果不指定,就是cpp内的名字
required="true" // 意思是必要节点
output="screen" // 将log输出到当前屏幕
/>
</launch>
(5)编译
cd ~/catkin_ws
catkin_make --source src/hello_ros/
(6)运行
命令行方式:
cd ~/catkin_ws/
source devel/setup.bash
roscore // 一个窗口
rosrun hello_ros hello_ros_node //另一个窗口

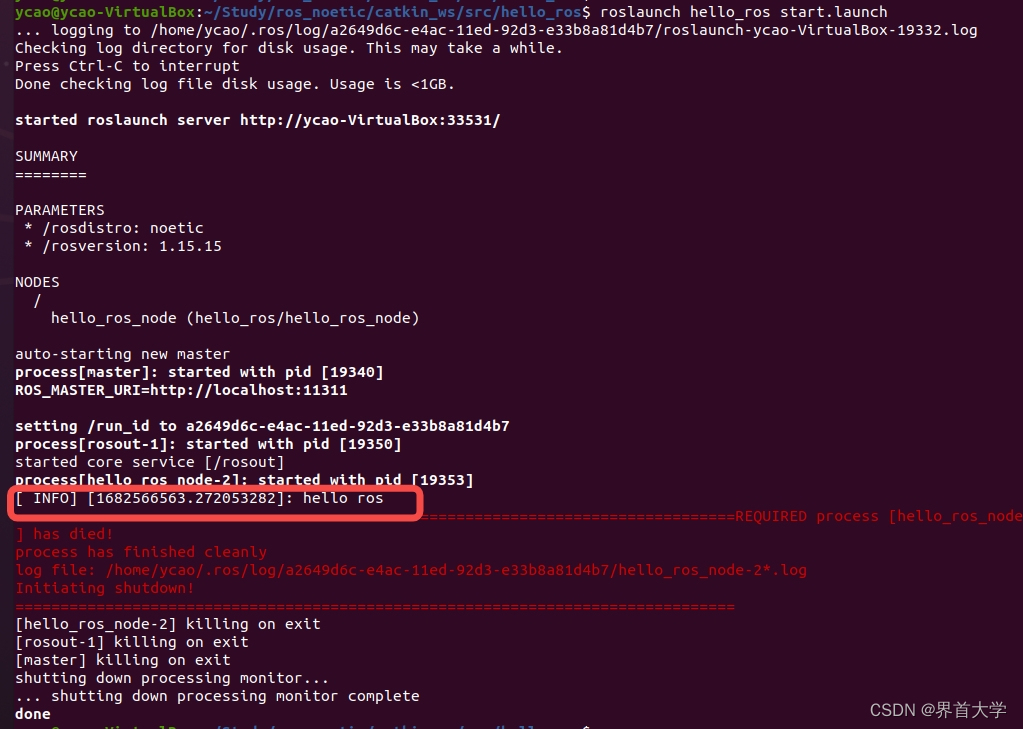
launch文件启动方式:
cd ~/catkin_ws/
source devel/setup.bash
roslaunch hello_ros start.launch

2.2 最简单的pub+sub样例,收发一个string
(1)创建simple_pub_sub软件包,并创建文件
cd ~/catkin_ws/src
catkin_create_pkg simple_pub_sub std_msgs rospy roscpp
cd simple_pub_sub/
touch src/pub.cpp
touch src/sub.cpp
mkdir launch
touch launch/start.launch
(2)编写pub.cpp
#include <ros/ros.h>
#include <std_msgs/String.h>
int main(int argc, char **argv) {
ros::init(argc, argv, "sim_pub");
ros::NodeHandle nh;
// 建立pub句柄,topic为/chatter,消息类型为std_msgs/String,队列长度为1000
ros::Publisher std_pub = nh.advertise<std_msgs::String>("chatter", 1000);
// 设置10hz发送频率
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok()) {
std_msgs::String msg;
msg.data = "hello ycao " + std::to_string(count++);
ROS_INFO("%s", msg.data.c_str());
std_pub.publish(msg);
// 这个接口是让节点检查并调用回调函数(这里没有回调函数,但一般都带着它)
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
(3)编写sub.cpp
#include <ros/ros.h>
#include <std_msgs/String.h>
void std_cb(const std_msgs::String::ConstPtr &msg) {
ROS_INFO("i received: %s", msg->data.c_str());
}
int main(int argc, char **argv) {
ros::init(argc, argv, "sim_sub");
ros::NodeHandle nh;
// 建立sub句柄,订阅/chatter topic,队列长度是1000,回调函数是std_cb
ros::Subscriber std_sub = nh.subscribe("chatter", 1000, &std_cb);
// 这个函数相当于一个循环,内部调用spinOnce,即时刻检查并调用回调函数。
ros::spin();
return 0;
}
(4)编写CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(simple_pub_sub)
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs)
catkin_package(CATKIN_DEPENDS roscpp rospy std_msgs)
include_directories(${
catkin_INCLUDE_DIRS})
add_executable(sim_pub src/pub.cpp)
add_executable(sim_sub src/sub.cpp)
target_link_libraries(sim_pub ${
catkin_LIBRARIES})
target_link_libraries(sim_sub ${
catkin_LIBRARIES})
(5)编写start.launch
<launch>
<node
pkg="simple_pub_sub"
type="sim_pub"
name="sim_pub"
required="true"
output="screen"
/>
<node
pkg="simple_pub_sub"
type="sim_sub"
name="sim_sub"
respawn="true" // 请求复位,即节点挂了,master会把它重新拉起来
output="screen"
/>
</launch>
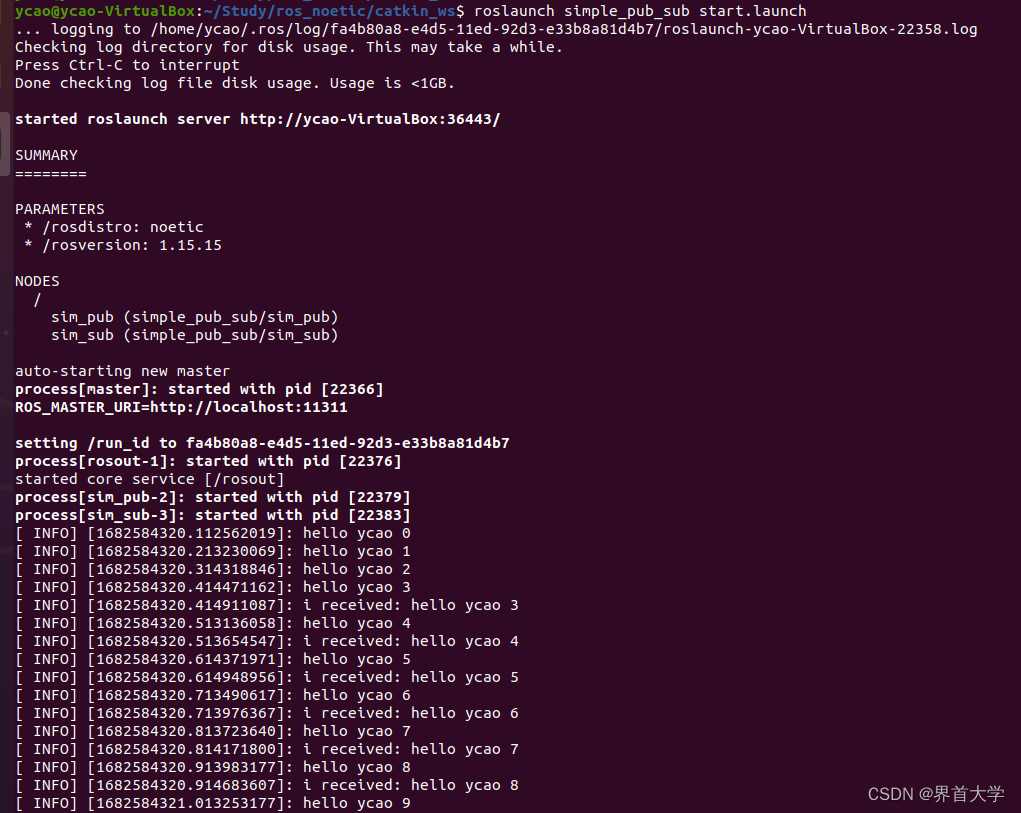
(6)编译并运行
cd ~/catkin_ws
catkin_make --source src/simple_pub_sub/
source devel/setup.bash
roslaunch simple_pub_sub start.launc
2.3 自定义msg,写pub+sub测试
(1)创建msf_self软件包,并创建文件
cd ~/catkin_ws/src
catkin_create_pkg msf_self std_msgs rospy roscpp
cd msf_self/
touch src/pub.cpp
touch src/sub.cpp
mkdir launch
touch launch/start.launch
mkdir msg
touch msg/Student.msg
(2)编写Student.msg
string name
uint8 age
(3)编写pub.cpp
#include <ros/ros.h>
// 引入自定义msg头文件,位于devel的include内
#include <msg_self/Student.h>
int main(int argc, char **argv) {
ros::init(argc, argv, "msg_pub");
ros::NodeHandle nh;
// topic是/student,消息类型为msg_self::Student
ros::Publisher msg_pub = nh.advertise<msg_self::Student>("student", 1000);
ros::Rate loop_rate(10);
while (ros::ok()) {
msg_self::Student msg;
msg.name = "jieshoudaxue";
msg.age = 30;
ROS_INFO("name = %s, age = %u", msg.name.c_str(), msg.age);
msg_pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
(4)编写sub.cpp
#include <ros/ros.h>
#include <msg_self/Student.h>
void stu_cb(const msg_self::Student::ConstPtr &msg) {
ROS_INFO("i received: %s, %u", msg->name.c_str(), msg->age);
}
int main(int argc, char **argv) {
ros::init(argc, argv, "msg_sub");
ros::NodeHandle nh;
ros::Subscriber num_sub = nh.subscribe("student", 1000, &stu_cb);
ros::spin();
return 0;
}
(5)编写CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(msg_self)
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation // 自定义消息,这个必须加
)
add_message_files(
FILES
Student.msg
)
generate_messages(
DEPENDENCIES
std_msgs // 自定义消息里,有string和uint8,这些在std_msgs里
)
catkin_package(CATKIN_DEPENDS roscpp rospy std_msgs message_runtime)
include_directories(${
catkin_INCLUDE_DIRS})
add_executable(${
PROJECT_NAME}_pub src/pub.cpp)
add_executable(${
PROJECT_NAME}_sub src/sub.cpp)
// 这个依赖必须加,不然cpp内找不到msg_self/Student.h
add_dependencies(${
PROJECT_NAME}_pub msg_self_generate_messages_cpp)
add_dependencies(${
PROJECT_NAME}_sub msg_self_generate_messages_cpp)
target_link_libraries(${
PROJECT_NAME}_pub ${
catkin_LIBRARIES})
target_link_libraries(${
PROJECT_NAME}_sub ${
catkin_LIBRARIES})
(6)修改package.xml,添加
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
(7)编写start.launch
<launch>
<node
pkg="msg_self"
type="msg_self_pub"
name="msg_self_pub"
required="true"
output="screen"
/>
<node
pkg="msg_self"
type="msg_self_sub"
name="msg_self_sub"
respawn="true"
output="screen"
/>
</launch>
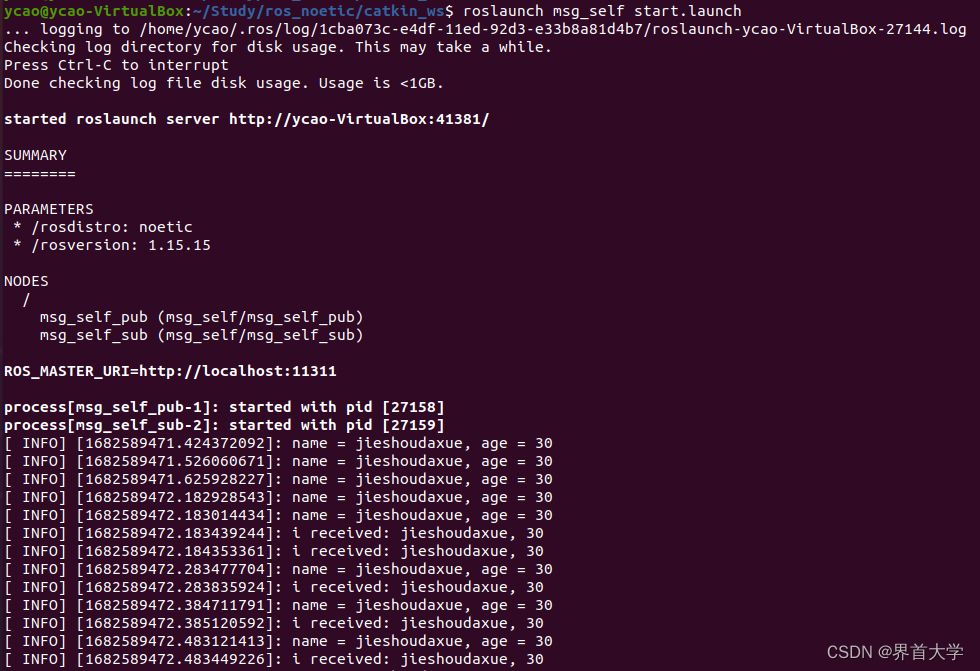
(8)编译和运行
cd ~/catkin_ws
catkin_make --source src/msg_self/
source devel/setup.bash
roslaunch msg_self start.launch
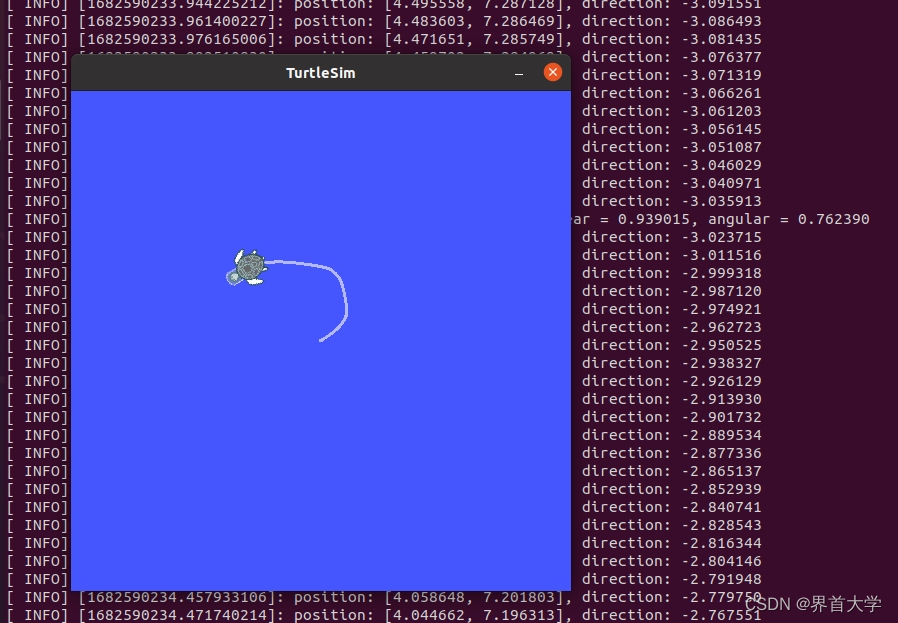
2.4 基于turtlesim,写一个复杂点的pub+sub
(1)创建handle_turtlesim软件包,其依赖turtlesim,内部有一个pub节点,用来向turtlesim发送随机运动命令,另一个sub节点,订阅turtlesim发出来的位置信息,并打印出来。
cd ~/catkin_ws/src
// 依赖turtlesim 和geometry_msgs
catkin_create_pkg handle_turtlesim turtlesim geometry_msgs rospy roscpp
cd handle_turtlesim/
touch src/pub.cpp
touch src/sub.cpp
mkdir launch
touch launch/start.launch
(2)编写pub.cpp
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
#include <stdlib.h>
int main(int argc, char** argv) {
ros::init(argc, argv, "pub_velocity");
ros::NodeHandle nh;
ros::Publisher pub = nh.advertise<geometry_msgs::Twist>("turtle1/cmd_vel", 1000);
srand(time(0));
ros::Rate loop_rate(2);
while(ros::ok()) {
geometry_msgs::Twist msg;
msg.linear.x = double(rand())/double(RAND_MAX);
msg.angular.z = double(rand())/double(RAND_MAX);
ROS_INFO("sending rand velocity cmd: linear = %f, angular = %f", msg.linear.x, msg.angular.z);
pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
(3)编写sub.cpp
#include <ros/ros.h>
#include <turtlesim/Pose.h>
void processMsg(const turtlesim::Pose& msg) {
ROS_INFO("position: [%f, %f], direction: %f", msg.x, msg.y, msg.theta);
}
int main(int argc, char** argv) {
ros::init(argc, argv, "sub_pose");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe("turtle1/pose", 1000, &processMsg);
ros::spin();
return 0;
}
(4)编写CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(handle_turtlesim)
find_package(catkin REQUIRED COMPONENTS
geometry_msgs
roscpp
rospy
turtlesim
)
catkin_package(CATKIN_DEPENDS geometry_msgs roscpp rospy turtlesim)
include_directories(${
catkin_INCLUDE_DIRS})
add_executable(${
PROJECT_NAME}_pub src/pub.cpp)
add_executable(${
PROJECT_NAME}_sub src/sub.cpp)
target_link_libraries(${
PROJECT_NAME}_pub
${
catkin_LIBRARIES}
)
target_link_libraries(${
PROJECT_NAME}_sub
${
catkin_LIBRARIES}
)
(5)编写start.launch
<launch>
// 指定命名空间,这样可以起很多个同名节点,如果不指定,就是默认命名空间“/”
<node
pkg="turtlesim"
type="turtlesim_node"
name="turtlesim"
respawn="true"
ns="sim1"
/>
<node
pkg="handle_turtlesim"
type="handle_turtlesim_pub"
name="handle_turtlesim_pub"
required="true"
output="screen"
ns="sim1"
/>
<node
pkg="handle_turtlesim"
type="handle_turtlesim_sub"
name="handle_turtlesim_sub"
output="screen"
ns="sim1"
/>
</launch>
(6)编译并运行
cd ~/catkin_ws
catkin_make --source src/handle_turtlesim/
source devel/setup.bash
roslaunch handle_turtlesim start.launch
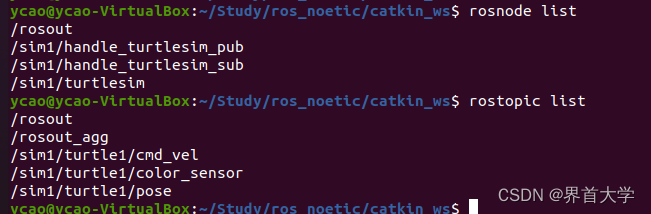
2.5 计算图源名称(graph resource name)
(1)节点、话题、服务和参数统称为计算图源,均用一个字符串标识。以2.4节的handle_turtlesim为例,主要涉及节点和话题,节点名是ros::init()函数指定的,话题名是创建pub和sub句柄时指定的,如下。


(2)这里需要引入一个概念,即“全局名称”和“相对名称”。全局名称指以“/”开头的名称,无论用作参数,还是写在cpp里,都没有任何二义性。而上面截图里的,都是相对名称,程序运行时需要解析为全局名称,也就是把两个名称拼在一块。
仍以handle_turtlesim举例,如果handle_turtlesim没有指定命名空间,则默认命名空间就是“/”:


如果handle_turtlesim指定命名空间,例如start.launch里的:ns=“sim1”,则默认命名空间就是/sim1,运行时的全局名称,就会带着/sim1。
ros提供相对名称这套机制,最大的好处是为package的移植提供便利,用户能方便地将某个节点和话题移植到其他的命名空间,而不用担心命名冲突。
(3)除了上面所说的“全局名称”和“相对名称”,还有一个“私有名称”,以波浪号打头“~” ,如:~max_vel。
ros运行时,也需要将私有名称解析为全局名称。与相对名称不同的是,私有名称不是用当前默认命名空间,而是用的它们节点名称作为命名空间。如节点名为:/turtlesim1,私有名称为:~max_vel,则相应的全局名称为:/turtlesim1/max_vel。
通常情况下,如果一个节点内的计算图源,只在该节点存在,则可以使用私有名称。
3 总结
本文中的例子放在了本人的github上: ros_src