目录
总体介绍

HashMap是我们用于元素映射使用频率最高的数据结构,它继承自AbstractList类,并且支持一条值为null的Key和无数条value为null的数据,HashMap是线程不安全的6在多线程环境下我们通过使用Collections中的synchronizedMap使其具有线程安全的能力或者直接使ConcurrentHashMap,随着JDK的更新迭代,自jdk1.8以来,HashMap的底层数据结构已经发展为数组+链表+红黑树
HashMap元素的存储

HashMap底层使用Node<K,V>进行元素的存储,我们查看其源码:
static class Node<K,V> implements Map.Entry<K,V> {
final int hash; //用来定位数组索引位置
final K key;
V value;
Node<K,V> next; //链表的下一个node
Node(int hash, K key, V value, Node<K,V> next) { ... }
public final K getKey(){ ... }
public final V getValue() { ... }
public final String toString() { ... }
public final int hashCode() { ... }
public final V setValue(V newValue) { ... }
public final boolean equals(Object o) { ... }
}在HashMap的源码中,一个比较重要的组成部分是Node[]table,即哈希桶数组,元素根据哈希算法最终被放入哈希桶不同下标的位置中,随着元素的不断增多,可能存在两个不同的元素有相同的下标,这便是哈希冲突,哈希桶解决哈希冲突的方法是链式地址法,所谓链式地址法,是指通过采用链表+数组的方式解决哈希冲突问题,随着哈希桶内元素的不断增加,当单个链表元素数量大于等于8以及哈希桶中的总元素数量>=64时,链表就会转化为红黑树
在hashmap中添加元素
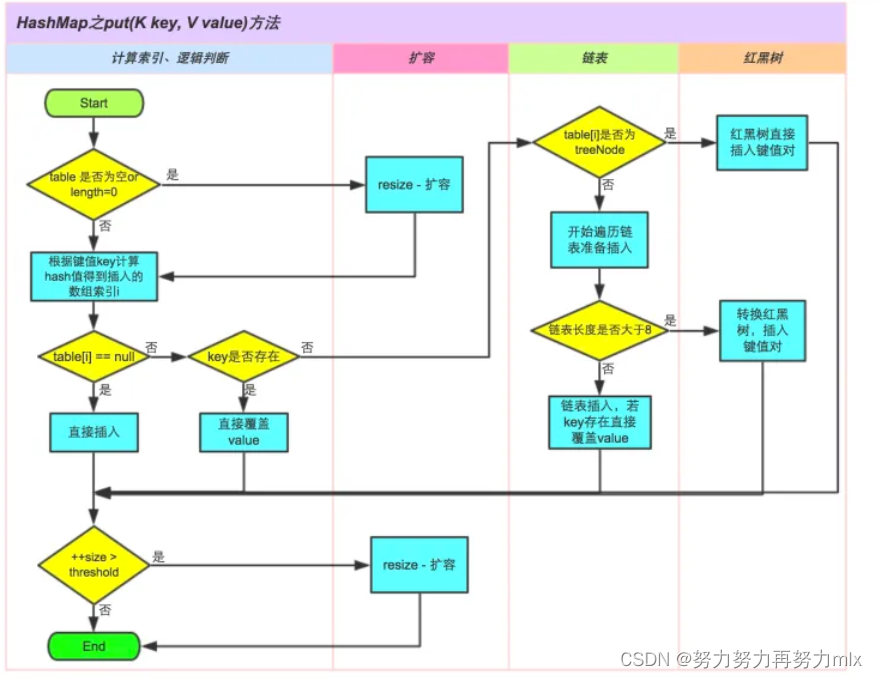
在HashMap中添加元素的逻辑如下:
1.判断数组table[i]是否为空,如果是空,则执行resize()进行扩容
2.根据键值key计算hash值得到应该插入的数组索引i,如果table[i]==null,直接创建新结点并加入数组,转向6;如果table[i]对应的元素不为空,转向3
3.判断table[i]首个元素是否与我们插入的元素完全相同(根据hashcode()以及equals()进行判断),如果相同直接覆盖value,否则转向4
4.判断table[i]是否是treeNode,即table[i]是否是红黑树,如果是红黑树,则直接在红黑树中插入键值对,否则转向5
5.遍历table[i],判断链表的长度是否大于等于8,如果满足条件直接把链表转化为红黑树,否则在链表中插入元素,遍历链表的过程中如果发现相同的key直接覆盖value即可
6.扩容成功后,判断实际存在的键值对数量size是否超过了最大容量threshold,如果超过直接进行扩容
HashMap中的源码如下:
1 public V put(K key, V value) {
2 // 对key的hashCode()做hash
3 return putVal(hash(key), key, value, false, true);
4 }
5
6 final V putVal(int hash, K key, V value, boolean onlyIfAbsent,
7 boolean evict) {
8 Node<K,V>[] tab; Node<K,V> p; int n, i;
9 // 步骤①:tab为空则创建
10 if ((tab = table) == null || (n = tab.length) == 0)
11 n = (tab = resize()).length;
12 // 步骤②:计算index,并对null做处理
13 if ((p = tab[i = (n - 1) & hash]) == null)
14 tab[i] = newNode(hash, key, value, null);
15 else {
16 Node<K,V> e; K k;
17 // 步骤③:节点key存在,直接覆盖value
18 if (p.hash == hash &&
19 ((k = p.key) == key || (key != null && key.equals(k))))
20 e = p;
21 // 步骤④:判断该链为红黑树
22 else if (p instanceof TreeNode)
23 e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);
24 // 步骤⑤:该链为链表
25 else {
26 for (int binCount = 0; ; ++binCount) {
27 if ((e = p.next) == null) {
28 p.next = newNode(hash, key,value,null);
//链表长度大于8转换为红黑树进行处理
29 if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st
30 treeifyBin(tab, hash);
31 break;
32 }
// key已经存在直接覆盖value
33 if (e.hash == hash &&
34 ((k = e.key) == key || (key != null && key.equals(k)))) break;
36 p = e;
37 }
38 }
39
40 if (e != null) { // existing mapping for key
41 V oldValue = e.value;
42 if (!onlyIfAbsent || oldValue == null)
43 e.value = value;
44 afterNodeAccess(e);
45 return oldValue;
46 }
47 }48 ++modCount;
49 // 步骤⑥:超过最大容量 就扩容
50 if (++size > threshold)
51 resize();
52 afterNodeInsertion(evict);
53 return null;
54 }
HashMap的扩容机制
与JDK 1.7相比,JDK1.8在原来扩容的基础上添加了红黑树,其实现的流程和条件如下:当满足扩容条件时,进行扩容操作(哈希表中的元素个数达到threshold),进行扩容操作时如果发现满足树化的条件(单条链表元素数量>=8&&哈希桶中存储的总元素的数量>=64)则将链表转化为红黑树。
具体的源码及分析如下:
final Node<K,V>[] resize() {
Node<K,V>[] oldTab = table;
int oldCap = (oldTab == null) ? 0 : oldTab.length;
int oldThr = threshold;
int newCap, newThr = 0;
if (oldCap > 0) {
if (oldCap >= MAXIMUM_CAPACITY) {
threshold = Integer.MAX_VALUE;
return oldTab;//超过了哈希表的最大容量不进行扩容,任由其碰撞
}
else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&
oldCap >= DEFAULT_INITIAL_CAPACITY)//数组容量扩大为两倍
newThr = oldThr << 1; // 将临界值扩大为两倍
}
else if (oldThr > 0) // initial capacity was placed in threshold
newCap = oldThr;
else { // zero initial threshold signifies using defaults
newCap = DEFAULT_INITIAL_CAPACITY;//初始化容量
newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);//初始化扩容门槛
}
if (newThr == 0) {
float ft = (float)newCap * loadFactor;
newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?
(int)ft : Integer.MAX_VALUE);
}
threshold = newThr;
@SuppressWarnings({"rawtypes","unchecked"})
Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap];
table = newTab;
if (oldTab != null) {
for (int j = 0; j < oldCap; ++j) {
Node<K,V> e;
if ((e = oldTab[j]) != null) {
oldTab[j] = null;
if (e.next == null)
newTab[e.hash & (newCap - 1)] = e;
else if (e instanceof TreeNode)
((TreeNode<K,V>)e).split(this, newTab, j, oldCap);
else { // preserve order
Node<K,V> loHead = null, loTail = null;
Node<K,V> hiHead = null, hiTail = null;
Node<K,V> next;
do {
next = e.next;
//新索引=原索引
if ((e.hash & oldCap) == 0) {
if (loTail == null)
loHead = e;
else
loTail.next = e;
loTail = e;
}
else {
//新的索引=原索引+oldCap
if (hiTail == null)
hiHead = e;
else
hiTail.next = e;
hiTail = e;
}
} while ((e = next) != null);
//原索引放入bucket
if (loTail != null) {
loTail.next = null;
newTab[j] = loHead;
}
//新索引放入bucket
if (hiTail != null) {
hiTail.next = null;
newTab[j + oldCap] = hiHead;
}
}
}
}
}
return newTab;
}除此之外,我们通过查看resize()的源码,我们可以发现JDK1.8对扩容之后元素的索引变化也是有一定的优化:经过观测可以发现,我们使用的是2次幂的扩展(指长度扩为原来2倍),所以,元素的位置要么是在原位置,要么是在原位置再移动2次幂的位置。看下图可以明白这句话的意思,n为table的长度,图(a)表示扩容前的key1和key2两种key确定索引位置的示例,图(b)表示扩容后key1和key2两种key确定索引位置的示例,其中hash1是key1对应的哈希与高位运算结果。

元素在重新计算hash之后,因为n变为2倍,那么n-1的mask范围在高位多1bit(红色),因此新的index就会发生这样的变化:

因此,我们在扩充HashMap的时候,不需要像JDK1.7的实现那样重新计算hash,只需要看看原来的hash值新增的那个bit是1还是0就好了,是0的话索引没变,是1的话索引变成“原索引+oldCap”,可以看看下图为16扩充为32的resize示意图:

这个设计可以说是相当巧妙了,既省略了类似JDK1.7的扩容之后重新计算hash的这样一个过程,提升了效率;除此之外,由于我们新增的一位是1还是0完全是随机的,所以可以把之前存在哈希冲突的结点有效的均匀分散到新的bucket中了。
HashMap的线程安全性
hashmap的线程不安全性主要体现在下面四个方面:
1.添加和删除元素时存在不安全性
在并发环境下,如果多个线程同时对HashMap进行修改操作,例如:添加、删除或修改元素,可能会导致数据结构出现冲突,最终可能会导致数据不一致或丢失。
这是因为多个线程在同一时间可能会尝试修改同一个桶(bucket)中的数据,而在修改过程中,可能会丢失某些数据或者覆盖其他线程修改的数据,从而导致数据不一致。

2.进行扩容操作时存在不安全性
HashMap 在达到一定容量时需要进行扩容,扩容过程需要重新计算哈希值,重新分配存储位置等操作。如果在扩容过程中有多个线程同时进行插入或删除操作,就可能导致数据结构混乱,甚至死循环等问题。
3.哈希冲突存在不安全性
在对数组进行插入或删除操作时,可能会出现 Hash 冲突,即不同的键值对可能会被映射到数组的同一个位置上,这就需要通过链表或红黑树来解决冲突。
而当多个线程同时进行插入或删除操作时,可能会导致链表或红黑树的结构被破坏,从而导致数据丢失或出现异常。
4.线程之间的不可见性导致安全问题
由于 HashMap 不是线程安全的,因此多个线程可能会同时访问同一个 HashMap 实例。
而当一个线程对 HashMap 进行修改时,其他线程可能无法立即看到这些修改,这就可能导致数据不一致的问题。
为了解决 HashMap 的线程安全问题,可以使用 ConcurrentHashMap,它使用了锁分段技术、CAS、 volatile 变量来保证线程安全和数据可见性。
但是,这些技术也会带来一些额外的开销,所以在非高并发场景下,HashMap可能会比ConcurrentHashMap更快。