一、前言:
yolov5模型训练需要训练后使用pytorch训练好了模型,训练可以借鉴如下,或者上网搜索本人建议环境为 pytorch==1.13.0 opencv==3.4.1 libtorch包==1.13.0 cmake==随便
2021-1-12YOLO数据集加载_torch_distributed_zero_first_该醒醒了~的博客-CSDN博客
本篇文章主要是通过 C++ 进行模型的部署。
最终效果:

二、安装Visual Studio :
官网地址:
https://visualstudio.microsoft.com/zh-hans/vs/older-downloads/
上诉链接可能为2017推荐安装 Visual Studio Installer 2019或者2022
三、下载Opencv:
官网地址:
Home - OpenCV建议安装3.4.1
解压后有这几个东西

接着进行系统变量添加
系统变量的path 双击点开

添加如下路径 opencv 配置教程网络上都有可以查到
...\opencv\build\x64\vc15\bin
....\opencv\build\include
(省略部分为你opencv文件夹所在路径)
四、下载Libtorch:
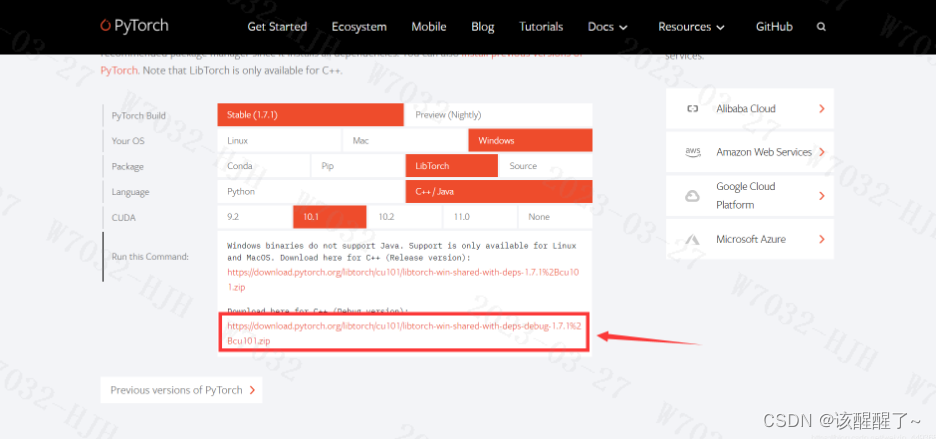
官网地址:可以在直接pytorch官网 在里面选择相对应的libtorch 如下图
下载相应版本:
解压如下
五、配置VS项目属性:
新建一个项目:

上方列表中找到(项目)点击下方的(某某属性)如下
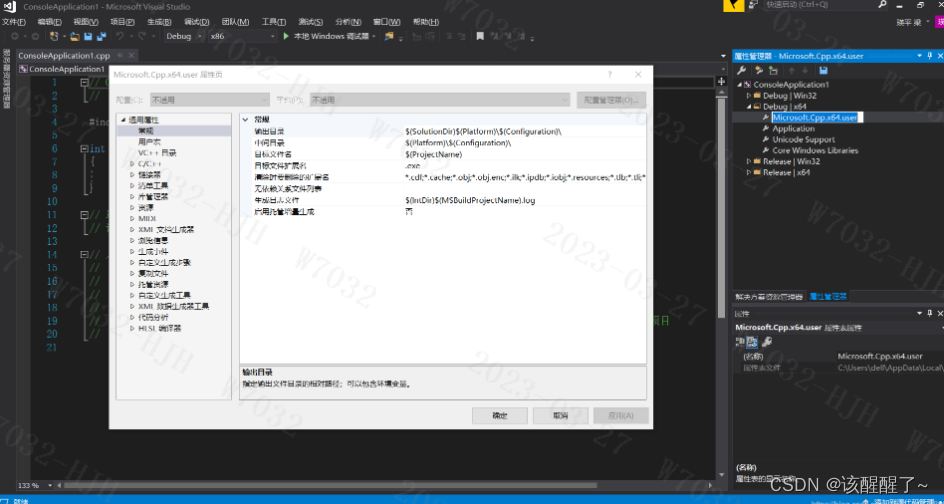
选择 VC++目录-包含目录,添加以下路径:

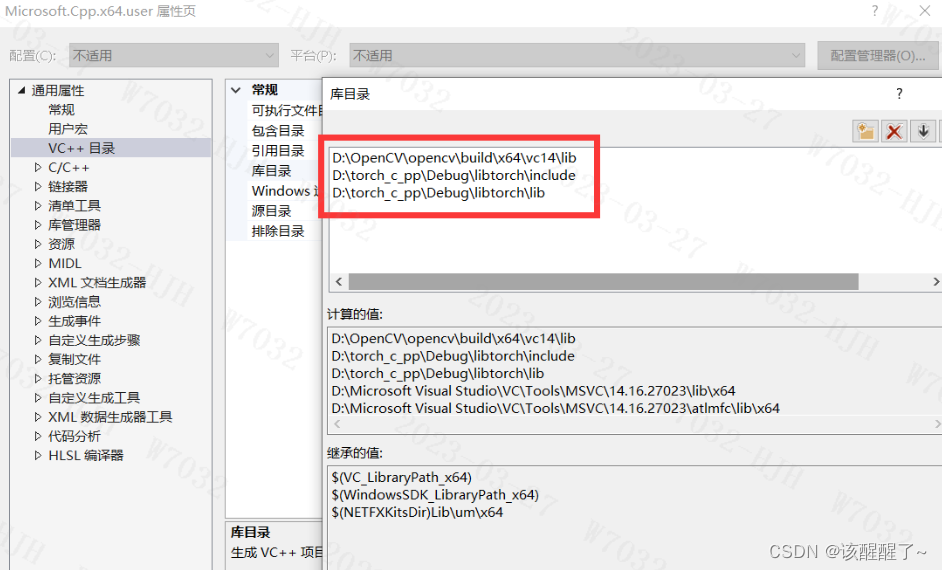
选择 VC++目录-库目录,添加以下路径:
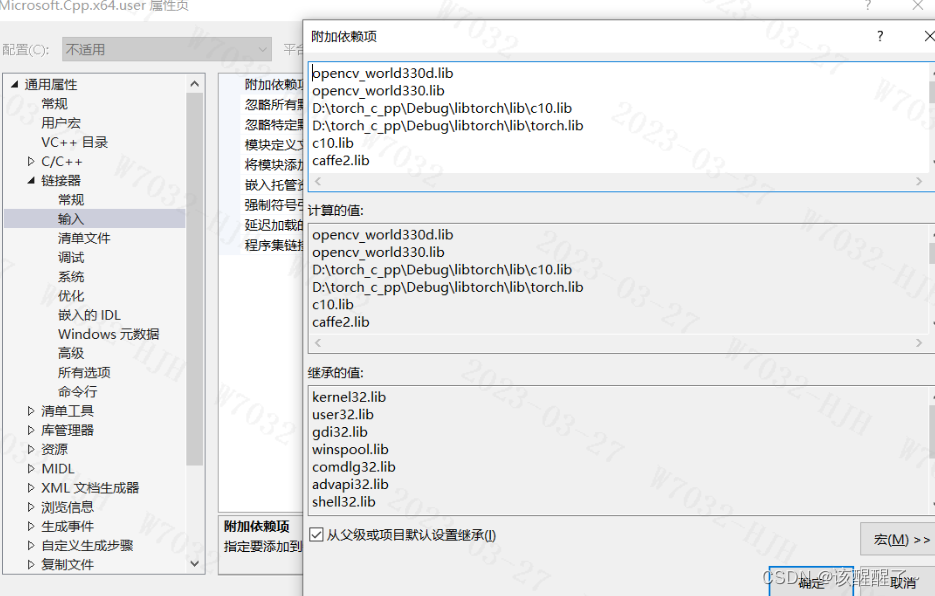
选择 链接器-输入-附加依赖项,添加以下路径:
......\opencv\build\x64\vc15\bin
........\opencv\build\x64\vc15\lib
如下文件路径如上 如果看不明白,直接上网搜,一大堆
注意如果你用的是debug项 只加入opencv_world330.lib 就是330后面没有d
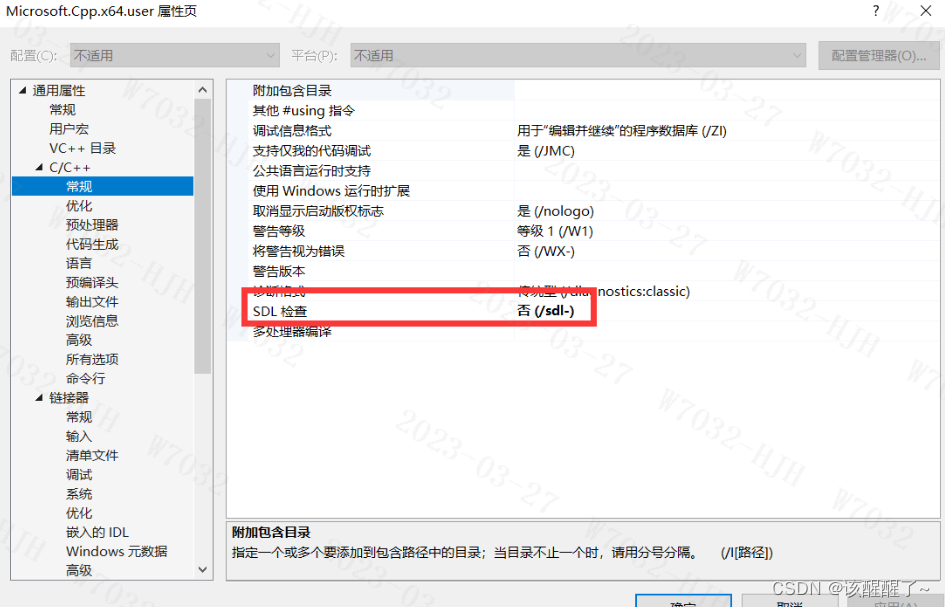
选择C/C+±常规-SDL检查,修改为”否“:
六、测试环境:
使用如下代码:
#include <torch/script.h>
#include <torch/torch.h>
#include <iostream>
#include <memory>
int main(int argc, const char* argv[]) {
std::cout << "cuda::is_available():" << torch::cuda::is_available() << std::endl;
torch::DeviceType device_type = at::kCPU; // 定义设备类型
if (torch::cuda::is_available())
device_type = at::kCUDA;
}注意如果你在debug中配置的环境就需要选择此项
结果

七、YOLOv5推理:
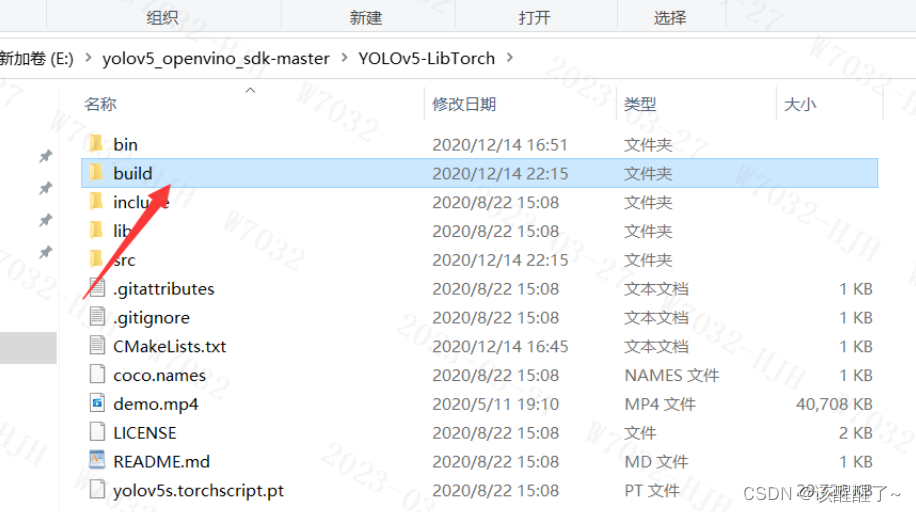
这里要注意,因为版本的原因,你下载的libtorch-yolov5可能和图中的文件存在差异
下载后解压,并创建build文件夹:
修改CMakeLists.txt:

在build文件夹中打开cmd,运行:
cmake ..注意cmake .. 中间有空格 并且此项目需要安装cmake可在浏览器上搜索下载,建议下载后缀名为.zip因为不需要安装,直接可以用,只是需要把里面的bin项添加到系统变量,方法看上面
如果报如下错
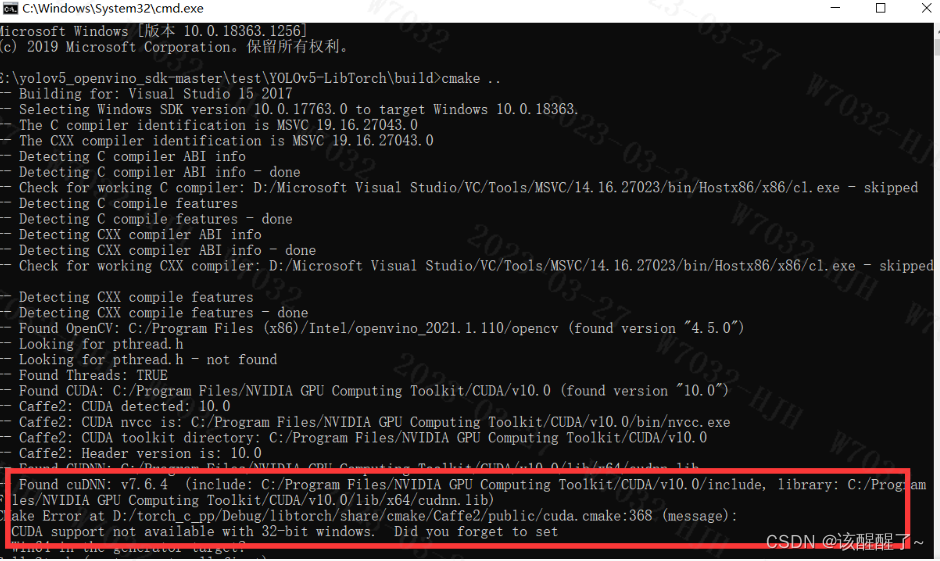
修改一下cmake命令:
cmake .. -DCMAKE_GENERATOR_PLATFORM=x64成功

可以看到build文件夹下生成了VS项目:
八、运行预测:
打开项目,将YOLOv5LibTorch.cpp修改为:
#include <opencv2/opencv.hpp>
#include <torch/script.h>
#include <torch/torch.h>
#include <algorithm>
#include <iostream>
#include <time.h>
std::vector<torch::Tensor> non_max_suppression(torch::Tensor preds, float score_thresh=0.5, float iou_thresh=0.5)
{
std::vector<torch::Tensor> output;
for (size_t i=0; i < preds.sizes()[0]; ++i)
{
torch::Tensor pred = preds.select(0, i);
// Filter by scores
torch::Tensor scores = pred.select(1, 4) * std::get<0>( torch::max(pred.slice(1, 5, pred.sizes()[1]), 1));
pred = torch::index_select(pred, 0, torch::nonzero(scores > score_thresh).select(1, 0));
if (pred.sizes()[0] == 0) continue;
// (center_x, center_y, w, h) to (left, top, right, bottom)
pred.select(1, 0) = pred.select(1, 0) - pred.select(1, 2) / 2;
pred.select(1, 1) = pred.select(1, 1) - pred.select(1, 3) / 2;
pred.select(1, 2) = pred.select(1, 0) + pred.select(1, 2);
pred.select(1, 3) = pred.select(1, 1) + pred.select(1, 3);
// Computing scores and classes
std::tuple<torch::Tensor, torch::Tensor> max_tuple = torch::max(pred.slice(1, 5, pred.sizes()[1]), 1);
pred.select(1, 4) = pred.select(1, 4) * std::get<0>(max_tuple);
pred.select(1, 5) = std::get<1>(max_tuple);
torch::Tensor dets = pred.slice(1, 0, 6);
torch::Tensor keep = torch::empty({
dets.sizes()[0]});
torch::Tensor areas = (dets.select(1, 3) - dets.select(1, 1)) * (dets.select(1, 2) - dets.select(1, 0));
std::tuple<torch::Tensor, torch::Tensor> indexes_tuple = torch::sort(dets.select(1, 4), 0, 1);
torch::Tensor v = std::get<0>(indexes_tuple);
torch::Tensor indexes = std::get<1>(indexes_tuple);
int count = 0;
while (indexes.sizes()[0] > 0)
{
keep[count] = (indexes[0].item().toInt());
count += 1;
// Computing overlaps
torch::Tensor lefts = torch::empty(indexes.sizes()[0] - 1);
torch::Tensor tops = torch::empty(indexes.sizes()[0] - 1);
torch::Tensor rights = torch::empty(indexes.sizes()[0] - 1);
torch::Tensor bottoms = torch::empty(indexes.sizes()[0] - 1);
torch::Tensor widths = torch::empty(indexes.sizes()[0] - 1);
torch::Tensor heights = torch::empty(indexes.sizes()[0] - 1);
for (size_t i=0; i<indexes.sizes()[0] - 1; ++i)
{
lefts[i] = std::max(dets[indexes[0]][0].item().toFloat(), dets[indexes[i + 1]][0].item().toFloat());
tops[i] = std::max(dets[indexes[0]][1].item().toFloat(), dets[indexes[i + 1]][1].item().toFloat());
rights[i] = std::min(dets[indexes[0]][2].item().toFloat(), dets[indexes[i + 1]][2].item().toFloat());
bottoms[i] = std::min(dets[indexes[0]][3].item().toFloat(), dets[indexes[i + 1]][3].item().toFloat());
widths[i] = std::max(float(0), rights[i].item().toFloat() - lefts[i].item().toFloat());
heights[i] = std::max(float(0), bottoms[i].item().toFloat() - tops[i].item().toFloat());
}
torch::Tensor overlaps = widths * heights;
// FIlter by IOUs
torch::Tensor ious = overlaps / (areas.select(0, indexes[0].item().toInt()) + torch::index_select(areas, 0, indexes.slice(0, 1, indexes.sizes()[0])) - overlaps);
indexes = torch::index_select(indexes, 0, torch::nonzero(ious <= iou_thresh).select(1, 0) + 1);
}
keep = keep.toType(torch::kInt64);
output.push_back(torch::index_select(dets, 0, keep.slice(0, 0, count)));
}
return output;
}
#include <torch/script.h>
#include <iostream>
#include <memory>
int main(int argc, const char* argv[]) {
std::cout << "cuda::is_available():" << torch::cuda::is_available() << std::endl;
torch::DeviceType device_type = at::kCPU; // 定义设备类型
if (torch::cuda::is_available())
device_type = at::kCUDA;
}
int a(int argc, char* argv[])
{
std::cout << "cuda::is_available():" << torch::cuda::is_available() << std::endl;
torch::DeviceType device_type = at::kCPU; // 定义设备类型
if (torch::cuda::is_available())
device_type = at::kCUDA;
// Loading Module
torch::jit::script::Module module = torch::jit::load("../yolov5s.torchscript.pt");
module.to(device_type); // 模型加载至GPU
std::vector<std::string> classnames;
std::ifstream f("../coco.names");
std::string name = "";
while (std::getline(f, name))
{
classnames.push_back(name);
}
if(argc < 2)
{
std::cout << "Please run with test video." << std::endl;
return -1;
}
std::string video = argv[1];
cv:: VideoCapture cap = cv::VideoCapture(video);
// cap.set(cv::CAP_PROP_FRAME_WIDTH, 1920);
// cap.set(cv::CAP_PROP_FRAME_HEIGHT, 1080);
cv::Mat frame, img;
cap.read(frame);
int width = frame.size().width;
int height = frame.size().height;
int count = 0;
while(cap.isOpened())
{
count++;
clock_t start = clock();
cap.read(frame);
if(frame.empty())
{
std::cout << "Read frame failed!" << std::endl;
break;
}
// Preparing input tensor
cv::resize(frame, img, cv::Size(640, 384));
// cv::cvtColor(img, img, cv::COLOR_BGR2RGB);
// torch::Tensor imgTensor = torch::from_blob(img.data, {img.rows, img.cols,3},torch::kByte);
// imgTensor = imgTensor.permute({2,0,1});
// imgTensor = imgTensor.toType(torch::kFloat);
// imgTensor = imgTensor.div(255);
// imgTensor = imgTensor.unsqueeze(0);
// imgTensor = imgTensor.to(device_type);
cv::cvtColor(img, img, cv::COLOR_BGR2RGB); // BGR -> RGB
img.convertTo(img, CV_32FC3, 1.0f / 255.0f); // normalization 1/255
auto imgTensor = torch::from_blob(img.data, {
1, img.rows, img.cols, img.channels() }).to(device_type);
imgTensor = imgTensor.permute({
0, 3, 1, 2 }).contiguous(); // BHWC -> BCHW (Batch, Channel, Height, Width)
std::vector<torch::jit::IValue> inputs;
inputs.emplace_back(imgTensor);
// preds: [?, 15120, 9]
torch::jit::IValue output = module.forward(inputs);
auto preds = output.toTuple()->elements()[0].toTensor();
// torch::Tensor preds = module.forward({ imgTensor }).toTensor();
std::vector<torch::Tensor> dets = non_max_suppression(preds, 0.4, 0.5);
if (dets.size() > 0)
{
// Visualize result
for (size_t i=0; i < dets[0].sizes()[0]; ++ i)
{
float left = dets[0][i][0].item().toFloat() * frame.cols / 640;
float top = dets[0][i][1].item().toFloat() * frame.rows / 384;
float right = dets[0][i][2].item().toFloat() * frame.cols / 640;
float bottom = dets[0][i][3].item().toFloat() * frame.rows / 384;
float score = dets[0][i][4].item().toFloat();
int classID = dets[0][i][5].item().toInt();
cv::rectangle(frame, cv::Rect(left, top, (right - left), (bottom - top)), cv::Scalar(0, 255, 0), 2);
cv::putText(frame,
classnames[classID] + ": " + cv::format("%.2f", score),
cv::Point(left, top),
cv::FONT_HERSHEY_SIMPLEX, (right - left) / 200, cv::Scalar(0, 255, 0), 2);
}
}
// std::cout << "-[INFO] Frame:" << std::to_string(count) << " FPS: " + std::to_string(float(1e7 / (clock() - start))) << std::endl;
std::cout << "-[INFO] Frame:" << std::to_string(count) << std::endl;
// cv::putText(frame, "FPS: " + std::to_string(int(1e7 / (clock() - start))),
// cv::Point(50, 50),
// cv::FONT_HERSHEY_SIMPLEX, 1, cv::Scalar(0, 255, 0), 2);
cv::imshow("", frame);
// cv::imwrite("../images/"+cv::format("%06d", count)+".jpg", frame);
cv::resize(frame, frame, cv::Size(width, height));
if(cv::waitKey(1)== 27) break;
}
cap.release();
return 0;
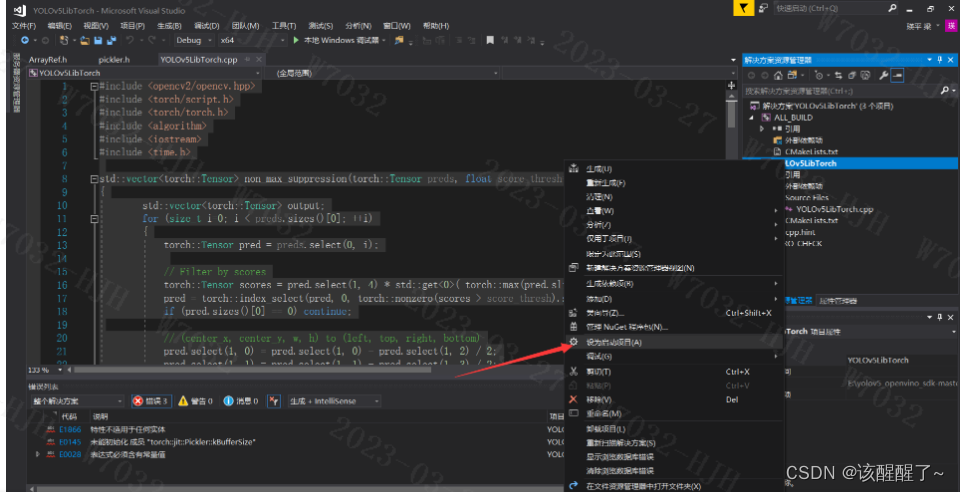
}然后右侧资源管理器,将其设置为启动项目:
设置项目属性,即命令行第一个参数(测试视频):
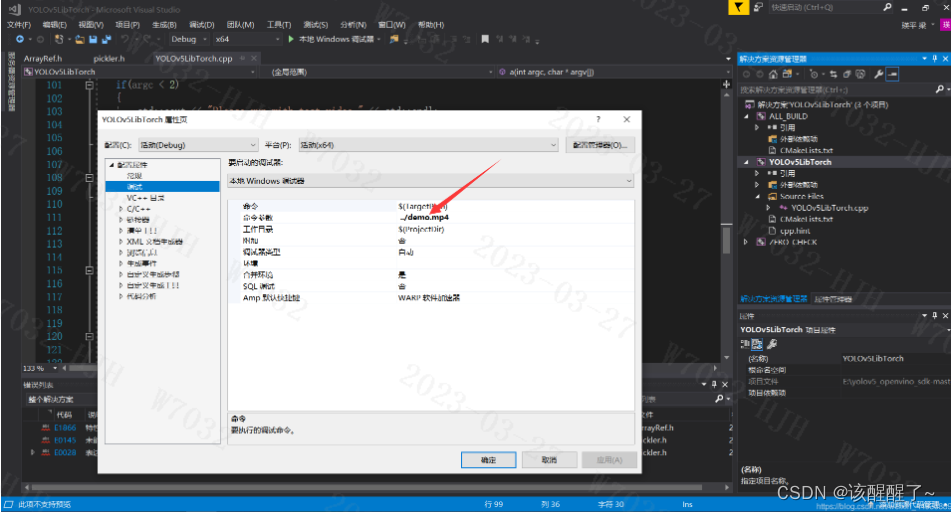
运行即可:

九、修改为自己的模型:
注意了 yolov5模型不能直接被调用,需要在转化一下
转到 yolov5 训练的路径,运行 export.py 导出模型:
在--weights-- default=‘ 修改你要转化的模型文件路径‘
下方device default=’cpu‘ 改为 default=’0‘ 如果你不是gpu就改成cpu
修改后后然后运行就可以了
不用担心转化后找不到,因为转化后直接保存到模型文件路径下

然后修改项目中的权重就好
总结一下,本文不代表所有,重点是需要安装cmake 部分可能bug会很多,过了cmake和cmake转化,其他的就很容易,过了皆大欢喜,过不了,我也咩办法!!