Unity PID控制算法可视化学习
引言
最近研究单片机时,偶然间对PID算法进行了点研究,PID真可谓是一个很优雅的算法。用它可以搞平衡车平衡、无人机飞行控制、温度控制。。等等,用处很多,很强大。于是打算用Unity写个小程序,来模拟pid的调参过程。
想法,需求
设有1000m³的水池,供某小区用水,该小区用水量随着时间变化而变化(消耗水池中的水),即负载是时刻变化的;另外,有一个注水开关,可以往水池中注水,现要求写一个控制算法,控制注水开关的开合度,以尽量保持水池中的水位在500m³。
出水、注水最大速度均为100m³/秒
水位传感器读取频率为1次/秒
思路
一 消耗水
水的消耗速度,随机进行变化,但这个指标,就像温度一样,它不能突变,所以写了个小算法,模拟水的消耗速度:
private bool bGrow = true;
public float CurrValue {
get; private set; }
private void MakeData()
{
float mid = ( maxValue - minValue ) * 0.5f + minValue;
float g;
if (bGrow)
g = CurrValue > mid ? Mathf.InverseLerp(mid*1.2f, maxValue, CurrValue) : 0.1f;
else
g = CurrValue < mid ? Mathf.InverseLerp(mid*0.8f, minValue, CurrValue) : 0.1f;
// g为概率
if (RandomBool(g))
bGrow = !bGrow;
if( bGrow )
CurrValue += Random.Range(0f, 5f);
else
CurrValue -= Random.Range(0f, 5f);
}
注:
实际上这里更优雅的做法是使用柏林噪声来模拟消耗速度的变化,但是写这篇文章时,我还没有了解到柏林噪声这个神奇的玩意,所以自己写了个比较笨拙的算法去模拟的:
网上搜了很久,没找到更优雅的算法,这是自己写的,大体意思就是:用个bool值表示现在的速度趋势是趋于上升还是下降,然后每次更新数据时,计算一个概率去反转这个方向,如果当前值越接近最大值或者接近最小值,反转的概率就越大,反之,值越靠近中间,反转的概率就越小,然后每次根据这个趋势增加或减少一个随机值。这样,就能大体模拟用水的速度曲线,而且大致上在大周期内往复,正好符合用水高峰的设定。
控制算法
当 前 误 差 = 目 标 水 位 − 当 前 水 位 累 计 误 差 = 累 计 误 差 + 当 前 误 差 ∗ Δ T i m e 误 差 变 化 率 = ( 当 前 误 差 − 上 次 误 差 ) / Δ T i m e 期 望 注 水 速 度 = 当 前 误 差 ∗ K p + 累 计 误 差 ∗ K i + 误 差 变 化 率 ∗ K d 注 水 速 度 = M a t h f . C l a m p ( 期 望 注 水 速 度 , 0 , 最 大 注 水 速 度 ) 当前误差 = 目标水位 - 当前水位\\ 累计误差 = 累计误差 + 当前误差 * ΔTime\\ 误差变化率 = (当前误差-上次误差) / ΔTime\\ 期望注水速度 = 当前误差 * K_p + 累计误差 * K_i + 误差变化率 * K_d\\ 注水速度=Mathf.Clamp( 期望注水速度, 0, 最大注水速度 ) 当前误差=目标水位−当前水位累计误差=累计误差+当前误差∗ΔTime误差变化率=(当前误差−上次误差)/ΔTime期望注水速度=当前误差∗Kp+累计误差∗Ki+误差变化率∗Kd注水速度=Mathf.Clamp(期望注水速度,0,最大注水速度)
// 每1秒读取一次水位传感器
private IEnumerator PIDController()
{
while (gameObject.activeSelf)
{
float err = targetPool - waterLeft;
totalErr += err * controlTime;
float de = (err - lastError) / controlTime;
lastError = err;
pidText.text = $"Kp={kp:0.0} Ki={ki:0.0} Kd={kd:0.0} Err={err:#00.00} TotalErr:{totalErr:00.00} deltaErr:{de:00.00}";
productionSpeed = Mathf.Clamp(err * kp + totalErr * ki + de * kd, 0f, 200f);
inSpeedTex.text = productionSpeed.ToString("000");
yield return new WaitForSeconds(controlTime);
}
}
更新水位
private void Update()
{
waterLeft = Mathf.Clamp(waterLeft + (productionSpeed - CurrValue) * Time.deltaTime, 0f, 1000f);
}
效果图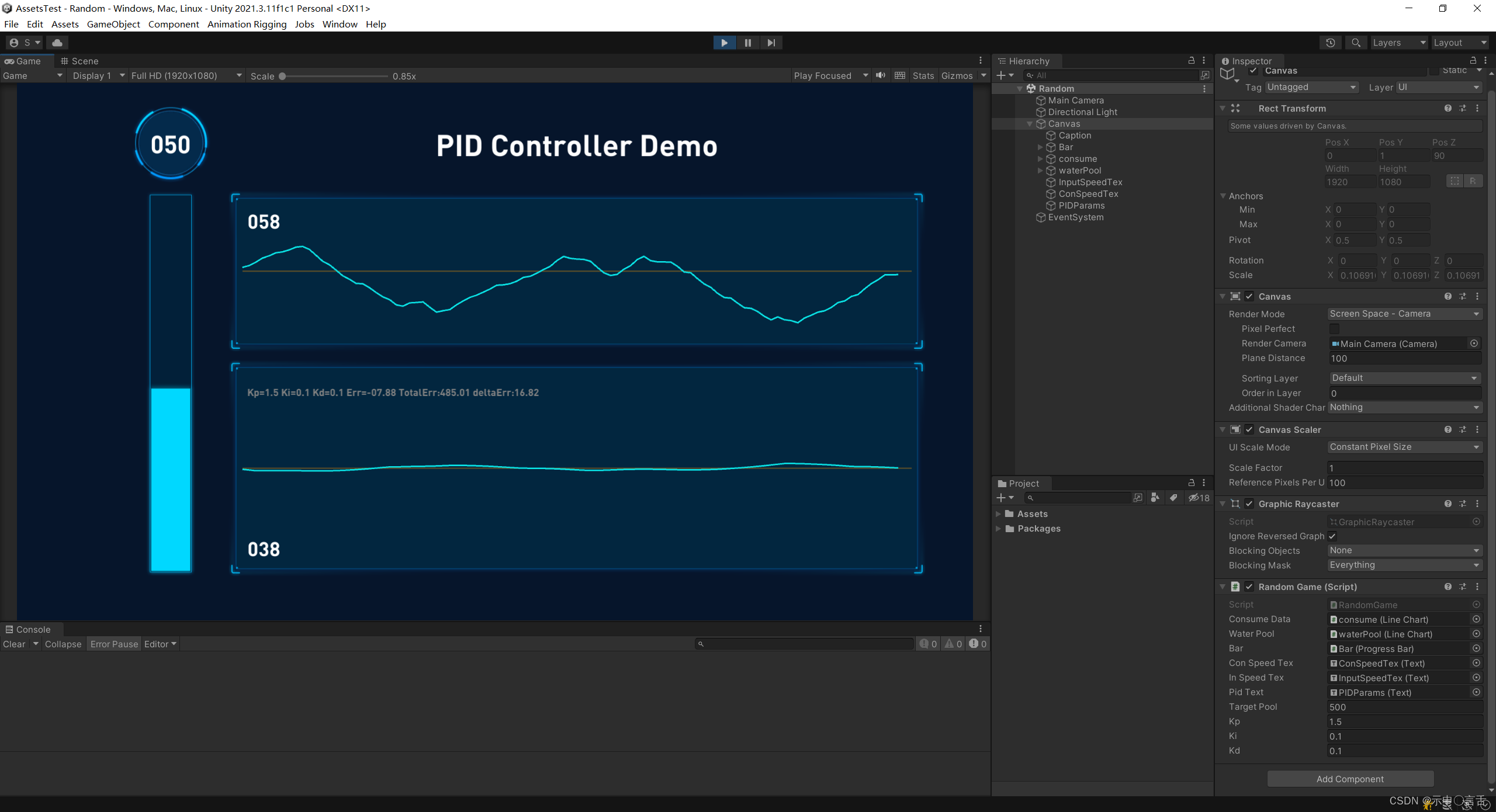
上面的折线图是消耗水的速度数据;下面的折线图是水池水位历史数据,左边的柱状图是当前水位。
调参过程
先将KI、KD置零,首先调整KP,KP其实就是比例因子,起主导作用,逐渐调大KP,使得控制曲线刚刚上下震动时,往下调一点;
然后调KD,KD是抑制因子,表示误差的趋势,用于减弱当前的调整趋势,KD过大会高频振荡,过小起不到抑制KP震动的效果。
最后调KI,KI是增益因子,误差积分而来,用于补充长期以来的误差。
当KP=1.5-2,KI=0.1-0.2,KD=0.1-0.2时,效果很好。基本上控制曲线是一条稳定的直线,无论消耗速度如何变化,水位始终保持在500m³(50%)。