移动机器人运动规划---基于图搜索的基础知识---图和图搜索算法的基本概念
图和图搜索算法的基本概念
图的基础概念
图是有节点和边的一种表达方式
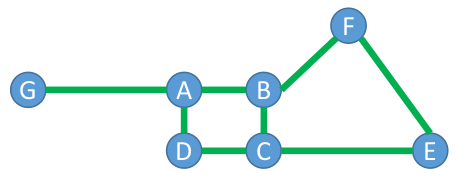
各节点由边连起来
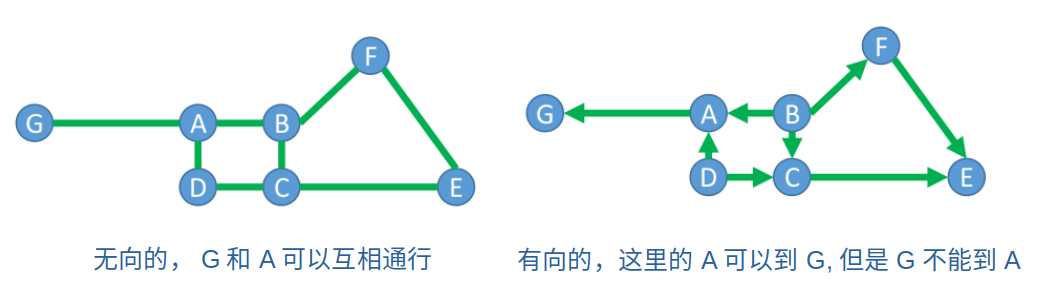
边可以是有向的,也可以无向的
边也可以有权重,如果没有特殊说明,可以认为权重是一样的。
下面则是有权重的
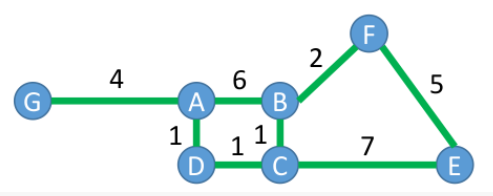
在每条边上机器人付出的代价不一样,代价可能是路径或者更广义的概念,比如机器人消耗的能量,或者易出现的风险。
图搜索基本概念
对于任何一个图搜索算法,首先要构造一个图
上图是抽象概念里的图
对于实际场景,我们需要人为构造一个图,以下是两种简单的例子
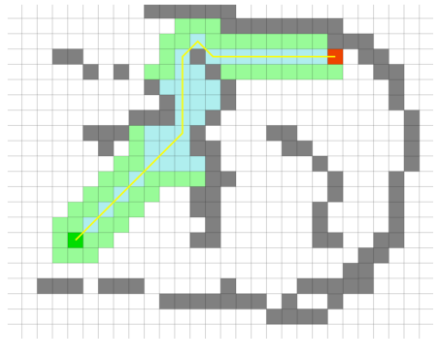
栅格地图的路径规划,里面的节点和相邻的节点是具有连接关系的,所以本身就是一个图了
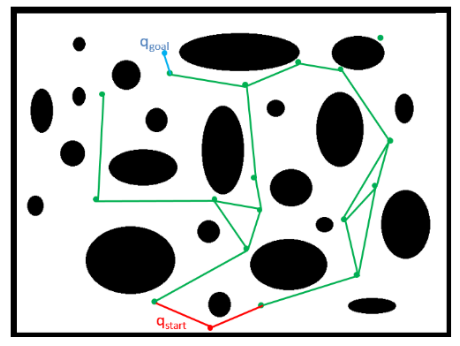
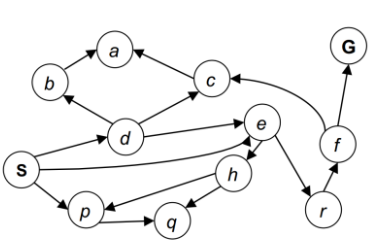
基于采样的,没有天然的节点关系,需要人为构造一个图在里面,例如上面就是通过算法构造的有节点和边组成的图
图搜索算法
搜索总是从起始状态Xs开始,到Xg结束
对于搜索节点,可以构建一个搜索树
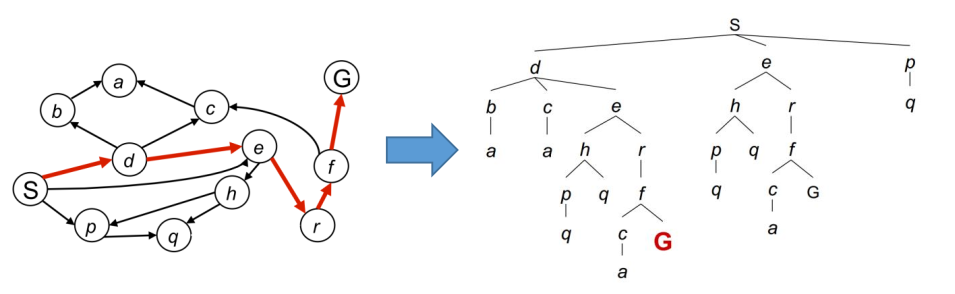
右边和左边是等价的,只是写成了树状的结构,这样看彼此关系更加清晰点
从起点搜索到终点后,回溯整个搜索过程,就可以得到希望的搜索路径
对于实际机器人来说,构建整个空间的搜索树,代价很大,所以需要尽可能快,但是不失搜索路径的算法。
图搜索算法框架
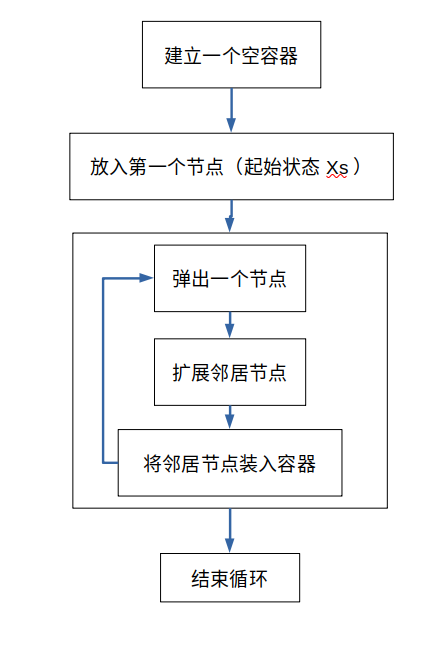
所有的图搜索算法都是按照下面的框架进行的:
1、维护一个容器,装载将来有可能访问的一个节点
2、容器初始化为空,放入的第一个节点就是起始状态Xs
3、循环:
根据预先定义的一个指标或者目的,从容器中弹出一个节点 ,称之为 访问一个节点
获取弹出节点所有的邻居节点, —扩展
将这些邻居节点装入容器
4、结束循环:访问到了结束状态,或者自定义的一个指标,结束循环
有两个下面的问题需要注意
什么时候结束循环?
- 一种可能就是容器空了,这代表没有了我们将来要访问的节点了,遍历完了所有节点
- 搜索到了结束节点
如果这个图本身是有回环的呢?
为了在图搜索中避免形成回环,永远走不出去,需要再维护一个新的容器,该容器装载着已经被访问过的节点,被访问过的节点不能再次被访问
图搜索优化的方向就是:
按照什么规则去访问节点,按照什么规则弹出节点,使我们尽可能快的找到终止节点。
图遍历算法:
- 广度优先搜索
- 深度优先搜索
广度优先搜索 遵循先进先出的原则,维护的是一个队列
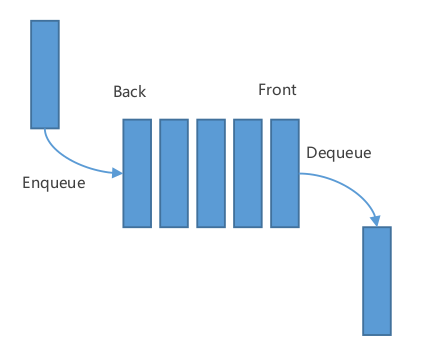
弹出元素,总是从队列的头弹出的
深度优先搜索 遵循的是后进先出的原则,维护的是一个堆栈
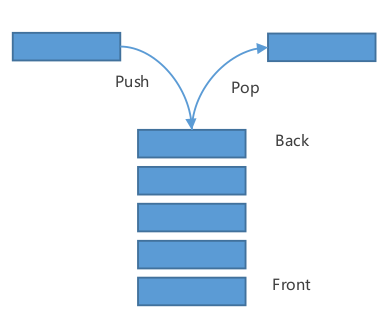
弹出从最上面弹出,最后进入容器的,最先被弹出来