一、前言
STM32的SPI外设可用作通讯的主机及从机,支持最高的SCK时钟频率为fpclk/2 (STM32F103型号的芯片默认 fpclk1为 36MHz,fpclk2为 72MHz),完全支持 SPI协议的4种模式,数据帧长度可设置为8位或16位,可设置数据 MSB先行或 LSB 先行。它还支持双线全双工、双线单向以及单线模式。其中双线单向模式可以同时使用 MOSI及 MISO 数据线向一个方向传输数据,可以加快一倍的传输速度。而单线模式则可以减少硬件接线,当然这样速率会受到影响。
二、SPI功能框图
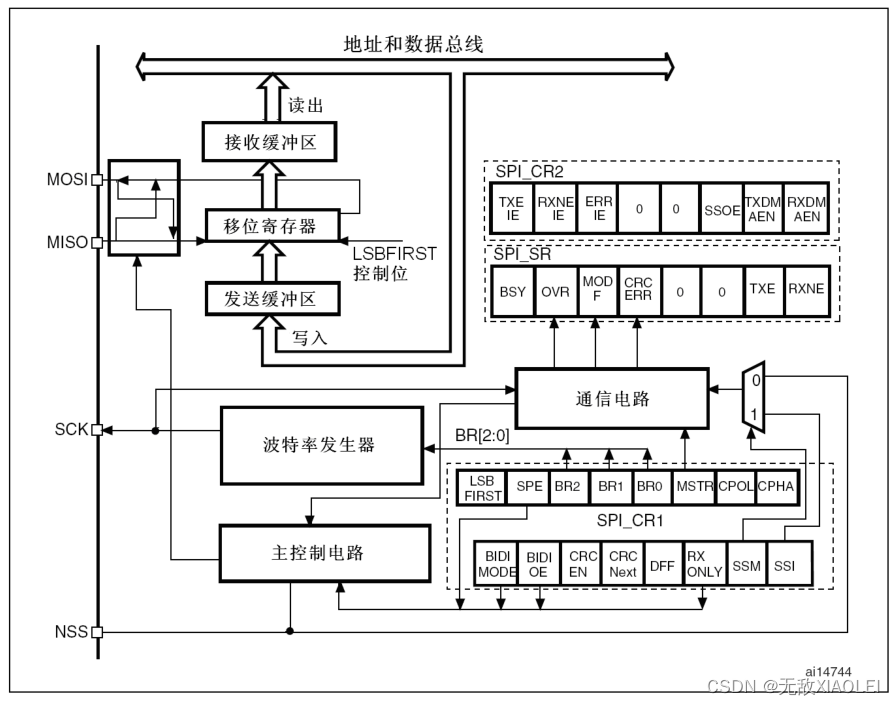
常SPI通过4个引脚与外部器件相连:
MISO:主设备输入/从设备输出引脚。该引脚在从模式下发送数据,在主模式下接收数据。
MOSI:主设备输出/从设备输入引脚。该引脚在主模式下发送数据,在从模式下接收数据。
SCK:串口时钟,作为主设备的输出,从设备的输入
NSS:从设备选择。这是一个可选的引脚,用来选择主/从设备。
STM32F103 SPI引脚总结:
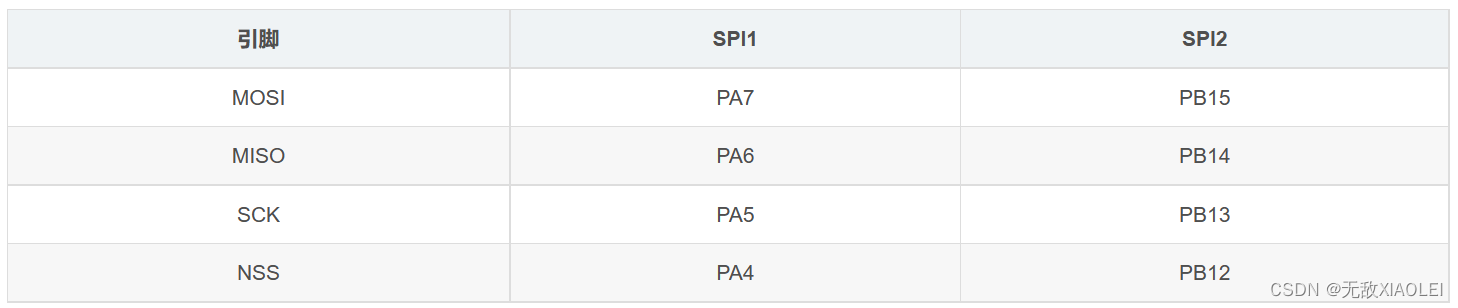
其中SPI1是APB2上的设备,最高通信速率达36Mbits/s(72M/2)。 SPI2是APB1上的设备,最高通信速率达18Mbits/s(36M/2)。
三、SPI通信读写数据
STM32使用 SPI外设通讯时,在通讯的不同阶段它会对“状态寄存器 SR”的不同数据位写入参数,我们通过读取这些寄存器标志来了解通讯状态。下图是“主模式”流程,即 STM32 作为 SPI 通讯的主机端时的数据收发过程。
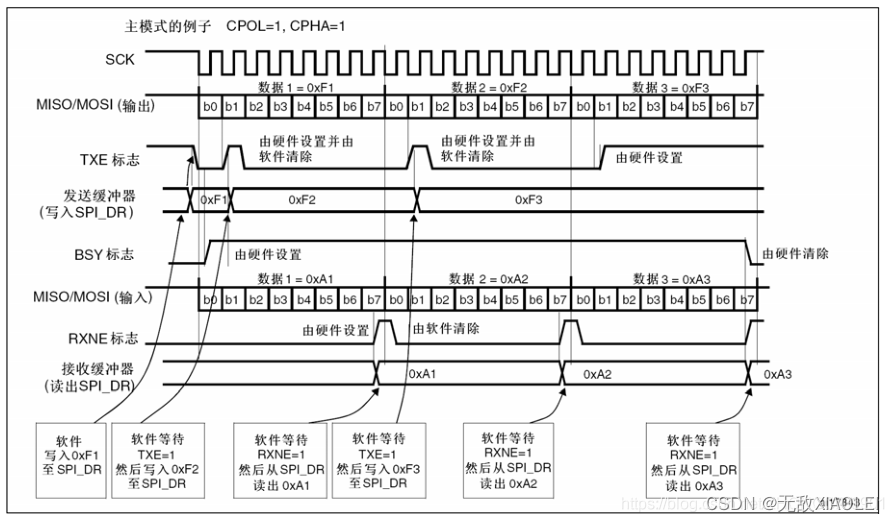
主模式收发流程及事件说明如下:
控制 NSS信号线,产生起始信号(图中没有画出);
把要发送的数据写入到“数据寄存器 DR”中,该数据会被存储到发送缓冲区;
通讯开始,SCK时钟开始运行。MOSI把发送缓冲区中的数据一位一位地传输出去;MISO 则把数据一位一位地存储进接收缓冲区中;
当发送完一帧数据的时候,“状态寄存器 SR”中的“TXE 标志位”会被置 1,表示传输完一帧,发送缓冲区已空;类似地,当接收完一帧数据的时候,“RXNE标志位”会被置 1,表示传输完一帧,接收缓冲区非空;
等待到“TXE标志位”为 1 时,若还要继续发送数据,则再次往“数据寄存器DR”写入数据即可;等待到“RXNE标志位”为 1时,通过读取“数据寄存器DR”可以获取接收缓冲区中的内容。
/**
* @brief 使用SPI读取一个字节的数据
* @param 读取数据的地址
* @retval 返回接收到的数据状态
*/
int8_t SPI_FLASH_ReadByte(uint8_t* pBuffer)
{
SPITimeout = SPIT_FLAG_TIMEOUT;
/* 等待接收缓冲区非空,RXNE事件 */
while (SPI_I2S_GetFlagStatus(BMI160_SPI, SPI_I2S_FLAG_RXNE) == RESET)
{
if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(1);
}
/* 读取数据寄存器,获取接收缓冲区数据 */
*pBuffer =SPI_I2S_ReceiveData(BMI160_SPI);
return 0;
}
/**
* @brief 使用SPI发送一个字节的数据
* @param byte:要发送的数据
* @retval 返回接发送的数据状态
*/
int8_t SPI_FLASH_SendByte(uint8_t byte)
{
SPITimeout = SPIT_FLAG_TIMEOUT;
/* 等待发送缓冲区为空,TXE事件 */
while (SPI_I2S_GetFlagStatus(BMI160_SPI, SPI_I2S_FLAG_TXE) == RESET)
{
if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(0);
}
/* 写入数据寄存器,把要写入的数据写入发送缓冲区 */
SPI_I2S_SendData(BMI160_SPI, byte);
return 0;
}
/**
* @brief Writes block of data to the Slave.
* @param pBuffer: pointer to the buffer containing the data to be written
* to the Slave.
* @param WriteAddr: Slave's internal address to write to.
* @param NumByteToWrite: number of bytes to write to the Slave.
* @retval Communication result
*/
int8_t Bsp_Spi_WriteBuffer(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{
int8_t ret;
uint8_t tmpBuf;
/*!< Select the Slave: Chip Select low */
BMI160_CS_LOW();
ret = SPI_FLASH_SendByte(WriteAddr);
ret = SPI_FLASH_ReadByte(&tmpBuf);
/*!< while there is data to be written on the Slave*/
while (NumByteToWrite--)
{
/*!< Send the current byte */
ret = SPI_FLASH_SendByte(*pBuffer);
ret = SPI_FLASH_ReadByte(&tmpBuf);
/*!< Point on the next byte to be written */
pBuffer++;
}
/*!< Deselect the FLASH: Chip Select high */
BMI160_CS_HIGH();
return ret;
}
/**
* @brief Reads a block of data from the Slave.
* @param pBuffer: pointer to the buffer that receives the data read from the Slave.
* @param ReadAddr: Slave internal address to read from.
* @param NumByteToRead: number of bytes to read from the Slave.
* @retval Communication result
*/
int8_t Bsp_Spi_ReadBuffer(uint8_t* pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead)
{
int8_t ret;
uint8_t tmpBuf;
/*!< Select the FLASH: Chip Select low */
BMI160_CS_LOW();
ret = SPI_FLASH_SendByte(ReadAddr);
ret = SPI_FLASH_ReadByte(&tmpBuf);
while (NumByteToRead--) /*!< while there is data to be read */
{
/*!< Read a byte from the FLASH */
ret = SPI_FLASH_SendByte(Dummy_Byte);
ret = SPI_FLASH_ReadByte(pBuffer);
/*!< Point to the next location where the byte read will be saved */
pBuffer++;
}
/*!< Deselect the FLASH: Chip Select high */
BMI160_CS_HIGH();
return ret;
}
备注:其中SPI工作在全双工的模式:
在发送数据的同时会读取数据,主要目的是发送数据,读取的数据是为了清除状态位丢弃即可。
在读取数据的同时会发送数据,主要目的是读取数据,发送数据是为了清除状态位发送无效数据即可。
这样的操作都是为了清除状态寄存器 SR对应的状态。
四、硬件SPI读写W25Q64
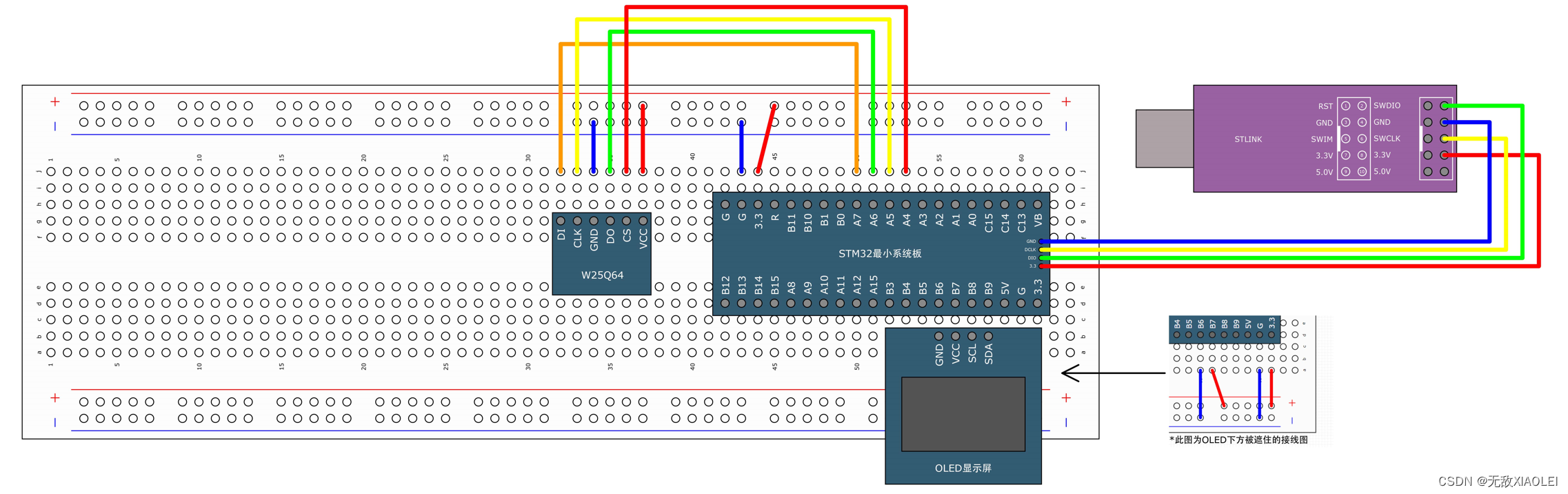
4.1接线图
与软件SPI读写W25Q64接线图相同
4.2程序代码
MySPI.c
#include "stm32f10x.h" // Device header
void MySPI_W_SS(uint8_t BitValue)//从机选择
{
GPIO_WriteBit(GPIOA, GPIO_Pin_4, (BitAction)BitValue);
}
void MySPI_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;//通用推挽输出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_4;//从机选择
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_5|GPIO_Pin_7;//SCK和MOSI
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IPU;//上拉输入
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_6;//MISO
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
//初始化SPI外设
SPI_InitTypeDef SPI_InitStructure;
SPI_InitStructure.SPI_BaudRatePrescaler=SPI_BaudRatePrescaler_128;//波特率预分频器
SPI_InitStructure.SPI_CPHA=SPI_CPHA_1Edge;//时钟相位,第几个边沿开始采样,第一个边沿蔡妍
SPI_InitStructure.SPI_CPOL=SPI_CPOL_Low;//时钟极性,低电平
SPI_InitStructure.SPI_CRCPolynomial=7;//CRC校验多项式,默认值7
SPI_InitStructure.SPI_DataSize=SPI_DataSize_8b;//配置8位还是16位数据帧
SPI_InitStructure.SPI_Direction=SPI_Direction_2Lines_FullDuplex;//配置SPI裁剪引脚,双工
SPI_InitStructure.SPI_FirstBit=SPI_FirstBit_MSB;//配置高位先行还是低位先行
SPI_InitStructure.SPI_Mode=SPI_Mode_Master;//主机还是从机
SPI_InitStructure.SPI_NSS=SPI_NSS_Soft;//软件模拟
SPI_Init(SPI1,&SPI_InitStructure);
//使能SPI外设
SPI_Cmd(SPI1,ENABLE);
//调用MySPI_W_SS,默认给SS输出高电平,默认你不选中从机
MySPI_W_SS(1);
}
void MySPI_Start(void)
{
MySPI_W_SS(0);
}
void MySPI_Stop(void)
{
MySPI_W_SS(1);
}
//交换字节
uint8_t MySPI_SwapByte(uint8_t ByteSend)
{
while(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE)!=SET);//发送缓冲区为空
SPI_I2S_SendData(SPI1, ByteSend);//发送数据到DR
while(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE)!=SET);//接收缓冲区不空
return SPI_I2S_ReceiveData(SPI1);//读取DR数据
}
W25Q64.c
#include "stm32f10x.h" // Device header
#include "MySPI.h"
#include "W25Q64_Ins.h"
void W25Q64_Init(void)
{
MySPI_Init();
}
void W25Q64_ReadID(uint8_t *MID, uint16_t *DID)
{
MySPI_Start();
MySPI_SwapByte(W25Q64_JEDEC_ID);
*MID = MySPI_SwapByte(0xFF);
*DID = MySPI_SwapByte(0xFF);
*DID <<= 8;
*DID |= MySPI_SwapByte(0xFF);
MySPI_Stop();
}
void W25Q64_WriteEnable(void)
{
MySPI_Start();
MySPI_SwapByte(W25Q64_WRITE_ENABLE);
MySPI_Stop();
}
void W25Q64_WaitBusy(void)
{
uint32_t Timeout;
MySPI_Start();
MySPI_SwapByte(W25Q64_READ_STATUS_REGISTER_1);
Timeout = 100000;
while ((MySPI_SwapByte(0xFF) & 0x01) == 0x01)
{
Timeout --;
if (Timeout == 0)
{
break;
}
}
MySPI_Stop();
}
void W25Q64_SectorErase(uint32_t Address)
{
W25Q64_WriteEnable();
MySPI_Start();
MySPI_SwapByte(W25Q64_SECTOR_ERASE_4KB);
MySPI_SwapByte(Address >> 16);
MySPI_SwapByte(Address >> 8);
MySPI_SwapByte(Address);
MySPI_Stop();
W25Q64_WaitBusy();
}
void W25Q64_ChipErase(void)
{
W25Q64_WriteEnable();
MySPI_Start();
MySPI_SwapByte(W25Q64_CHIP_ERASE);
MySPI_Stop();
W25Q64_WaitBusy();
}
void W25Q64_PageProgram(uint32_t Address, uint8_t *DataArray, uint32_t Count)
{
uint8_t i;
W25Q64_WriteEnable();
MySPI_Start();
MySPI_SwapByte(W25Q64_PAGE_PROGRAM);
MySPI_SwapByte(Address >> 16);
MySPI_SwapByte(Address >> 8);
MySPI_SwapByte(Address);
for (i = 0; i < Count; i ++)
{
MySPI_SwapByte(DataArray[i]);
}
MySPI_Stop();
W25Q64_WaitBusy();
}
void W25Q64_ReadData(uint32_t Address, uint8_t *DataArray, uint32_t Count)
{
uint8_t i;
MySPI_Start();
MySPI_SwapByte(W25Q64_READ_DATA);
MySPI_SwapByte(Address >> 16);
MySPI_SwapByte(Address >> 8);
MySPI_SwapByte(Address);
for (i = 0; i < Count; i ++)
{
DataArray[i] = MySPI_SwapByte(0xFF);
}
MySPI_Stop();
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h" //延时函数
#include "OLED.h"
#include "W25Q64.h"
uint8_t MID;
uint16_t DID;
uint8_t ArrayWrite[] = {
0x01, 0x02, 0x03, 0x04};
uint8_t ArrayRead[4];
int main(void)
{
OLED_Init();
W25Q64_Init();
OLED_ShowString(1, 1, "MID: DID:");
OLED_ShowString(2, 1, "W:");
OLED_ShowString(3, 1, "R:");
W25Q64_ReadID(&MID, &DID);
OLED_ShowHexNum(1, 5, MID, 2);
OLED_ShowHexNum(1, 12, DID, 4);
W25Q64_SectorErase(0x000000);
W25Q64_PageProgram(0x000000, ArrayWrite, 4);
W25Q64_ReadData(0x000000, ArrayRead, 4);
OLED_ShowHexNum(2, 3, ArrayWrite[0], 2);
OLED_ShowHexNum(2, 6, ArrayWrite[1], 2);
OLED_ShowHexNum(2, 9, ArrayWrite[2], 2);
OLED_ShowHexNum(2, 12, ArrayWrite[3], 2);
OLED_ShowHexNum(3, 3, ArrayRead[0], 2);
OLED_ShowHexNum(3, 6, ArrayRead[1], 2);
OLED_ShowHexNum(3, 9, ArrayRead[2], 2);
OLED_ShowHexNum(3, 12, ArrayRead[3], 2);
while(1)
{
}
}