6. SPI
6.1 基本概念
全称Serial Peripheral Interface,是一种全双工,同步通信
6.1.1 物理层
共四条线:MOSI、MISO、SCK、NSS
| 信号线 | 作用 |
|---|---|
| MOSI | 主机输出,从机输入 |
| MISO | 主机输入,从机输出 |
| SCK | 时钟信号,由主机产生,用于通讯同步 |
| NSS | 从机使能信号,由主机控制(片选线) |
6.1.2 协议层
通讯的起始和停止
通讯起始:NSS线信号由高变低,对应的从机被选中,开始通讯
通讯结束:NSS线信号由低变高,对应的从机取消选中状态
SPI的四种模式
**四种模式的区别:**总线空闲时sck的时钟状态(CPOL)及数据采样时刻(CPHA)。
**CPOL:**SPI通讯设备处于空闲时(NSS为高电平时)SCK的状态。CPOL=0,则SCK线在空闲时为低电平;CPOL=1,则SCK线在空闲时为高电平
**CPHA:**数据采样的时刻。CPHA=0,MOSI或MISO线上的信号将在SCK线的奇数个跳变沿被采样;CPHA=1,MOSI或MISO线上的信号在SCK线的偶数个个跳变沿被采样。
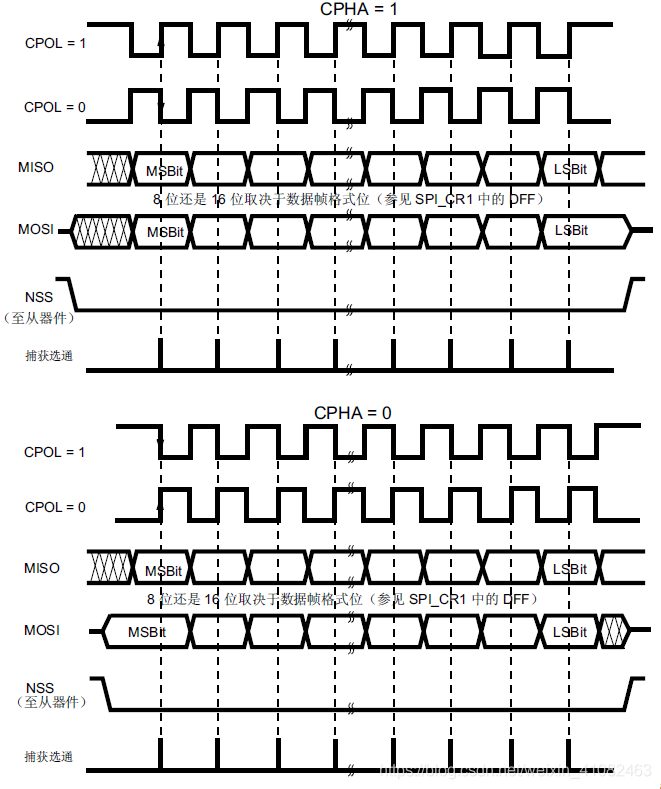
注:四种模式都可以使用,但是主从设备必须采用同一种模式。
6.2 STM32的SPI
STM32中SPI个数从3到6个不等,支持Motorola和TI协议。STM32还支持I2S功能。
6.3 CubeMX配置
- 左侧目录>Connectivity>点SPI1/SPI2……~> 勾选模式
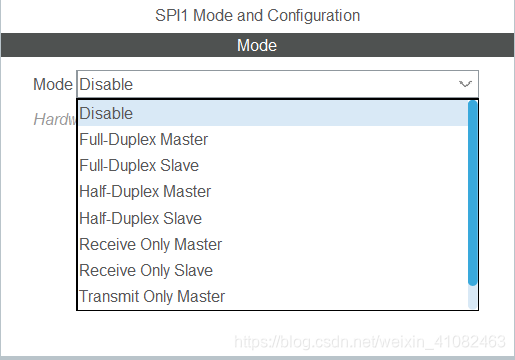
| Mode | 含义 |
|---|---|
| Full-Duplex Master | 全双工主模式 |
| Full-Duplex Slave | 全双工从模式 |
| Half-Duplex Master | 半双工主模式 |
| Half-Duplex Slave | 半双工从模式 |
| Receive Only Master | 仅接收主模式 |
| Receive Only Slave | 仅接收从模式 |
| Transmit Only Master | 仅发送主模式 |
- 参数配置
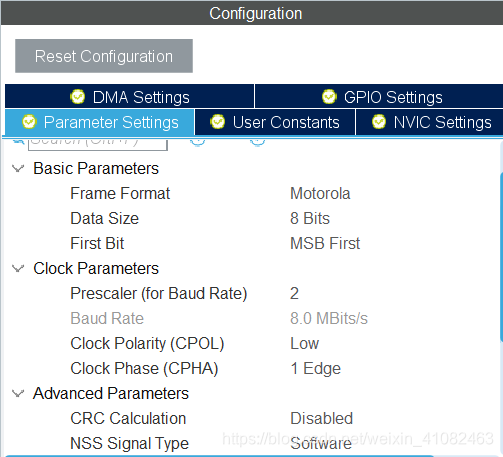
| 参数 | 含义 |
|---|---|
| Frame Format | 框架格式,有Motorola和TI两种 |
| Data Size | 数据长度,8bit和16bit两种 |
| First Bit | 对齐形式,高位先行和低位先行 |
| Prescaler | 预分频,用于控制波特率,波特率=16MHz/Prescaler |
| Clock Polarity | CPOL,前面有讲 |
| Clock Phase | CPHA,前面有讲 |
| CRC Calculation | 是否启用CRC |
| NSS Signal Type | 片选形式,硬件实现还是软件实现 |
6.4 编程
HAL库关于CAN的所有函数定义和结构体分别在 Drivers/STM32F4xx_HAL_Driver 文件夹下 stm32f4xx_HAL_Driver.c 和 stm32f4xx_HAL_Driver.h 中
下面列举一些基本的和常用的
6.4.1 结构体
只有SPI_InitTypeDef和SPI_HandleTypeDef,分别用于初始化定义和句柄定义。如果配合CubeMx,这两个都用不上
6.4.2 函数
SPI关于IO的定义在stm32f4xx_HAL_Driver.c文件中701-2563行
| 函数 | 功能 |
|---|---|
| HAL_SPI_Transmit | 发送数据 |
| HAL_SPI_Receive | 接收数据 |
| HAL_SPI_TransmitReceive | 全双工,接收和发送数据 |
| HAL_SPI_Transmit_IT | 发送成功中断 |
| HAL_SPI_Receive_IT | 接收成功中断 |
| HAL_SPI_TransmitReceive_IT | 发送接收成功中断 |
HAL_StatusTypeDef HAL_SPI_Transmit(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout)
功能:发送一段数据
参数:spi句柄指针 发送数据数组名
发送数组长度
timeout,超出这个时间就报错,单位是ms
返回值:返回值:HAL状态
HAL_StatusTypeDef HAL_SPI_Receive(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout)
功能:接收一段数据
参数:spi句柄指针 接收数据数组名
接收数组长度
timeout,超出这个时间就报错,单位是ms
返回值:返回值:HAL状态
HAL_StatusTypeDef HAL_SPI_TransmitReceive(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData, uint16_t Size,uint32_t Timeout)
功能:接收并发送一段数据
参数:spi句柄指针 发送数据数组名
接收数据数组名
接收发送数组长度
timeout,超出这个时间就报错,单位是ms
返回值:返回值:HAL状态
6.4.3 SPI编程示例
SPI 的编程较CAN来说方便了很多,配合Cubemx的话就不需要做初始化配置了。
然而由于实际使用过程中所使用的STM可能作为上位机也可能作为下位机,也就是主机和从机。作为从机,相当于一个部门的下属,只需要管输入输出就完事了,不需要操心片选的事。作为主机就需要协调各从机了,相当于一个部门的主管,需要给下级授意,它改接收任务或者给主机汇报
CS(片选信号)有硬件片选和软件片选两种形式。
硬件片选
硬件片选是硬件已经封装好了通讯时序和片选信号开始终止,所以只需要调用上述的IO类函数即可
软件片选
软件片选稍微麻烦一点。需要另外分一个单片机引脚给CS信号,GPIO输出功能,最好配置为上拉。
当需要和某从机通信时,需要给它发送片选命令,即手动将片选线的高电平置低。例如下面这个给从机的发送过程:
HAL_GPIO_WritePin(GPIOx, GPIO_PIN_x, GPIO_PIN_RESET) //将片选线置低,告诉从机开始通信
HAL_SPI_Tramsmit(&hspix, (uint8_t*)data, len, timeout) //发送一个数据
HAL_GPIO_WritePin(GPIOx, GPIO_PIN_x, GPIO_PIN_SET) //将片选线重新置高,告诉从机结束通信
再次强调,通讯过程一定要在片选线为低电平时才有效!!!
