文章目录
noise type
1. 高斯噪声和泊松噪声
下面公式表示用异方差高斯近似泊松分布:

https://people.csail.mit.edu/hasinoff/pubs/hasinoff-photon-2012-preprint.pdf
但是这个在暗光下(极暗,pixel值<2)还是有误差,详细在第2节说明
http://hongyitong.github.io/2016/11/13/%E4%BA%8C%E9%A1%B9%E5%88%86%E5%B8%83%E3%80%81%E6%B3%8A%E6%9D%BE%E5%88%86%E5%B8%83%E3%80%81%E6%AD%A3%E6%80%81%E5%88%86%E5%B8%83/
2. 高斯分布和泊松分布的差异:
主要参考Gaussian Noise is Added, Poisson Noise is Applied
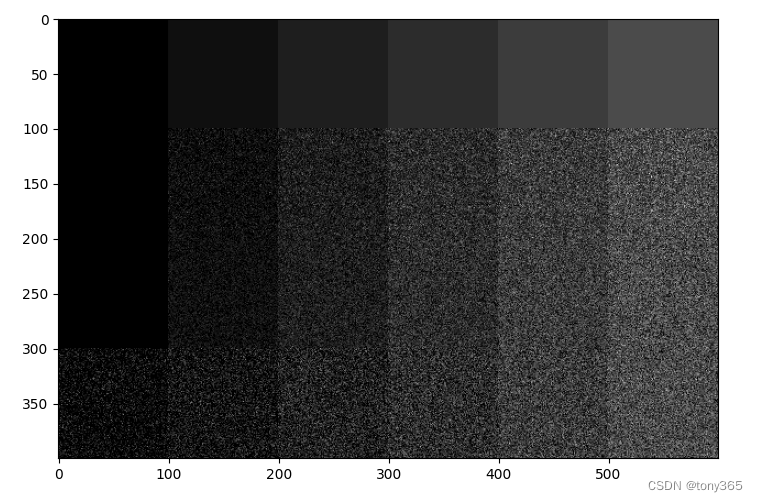
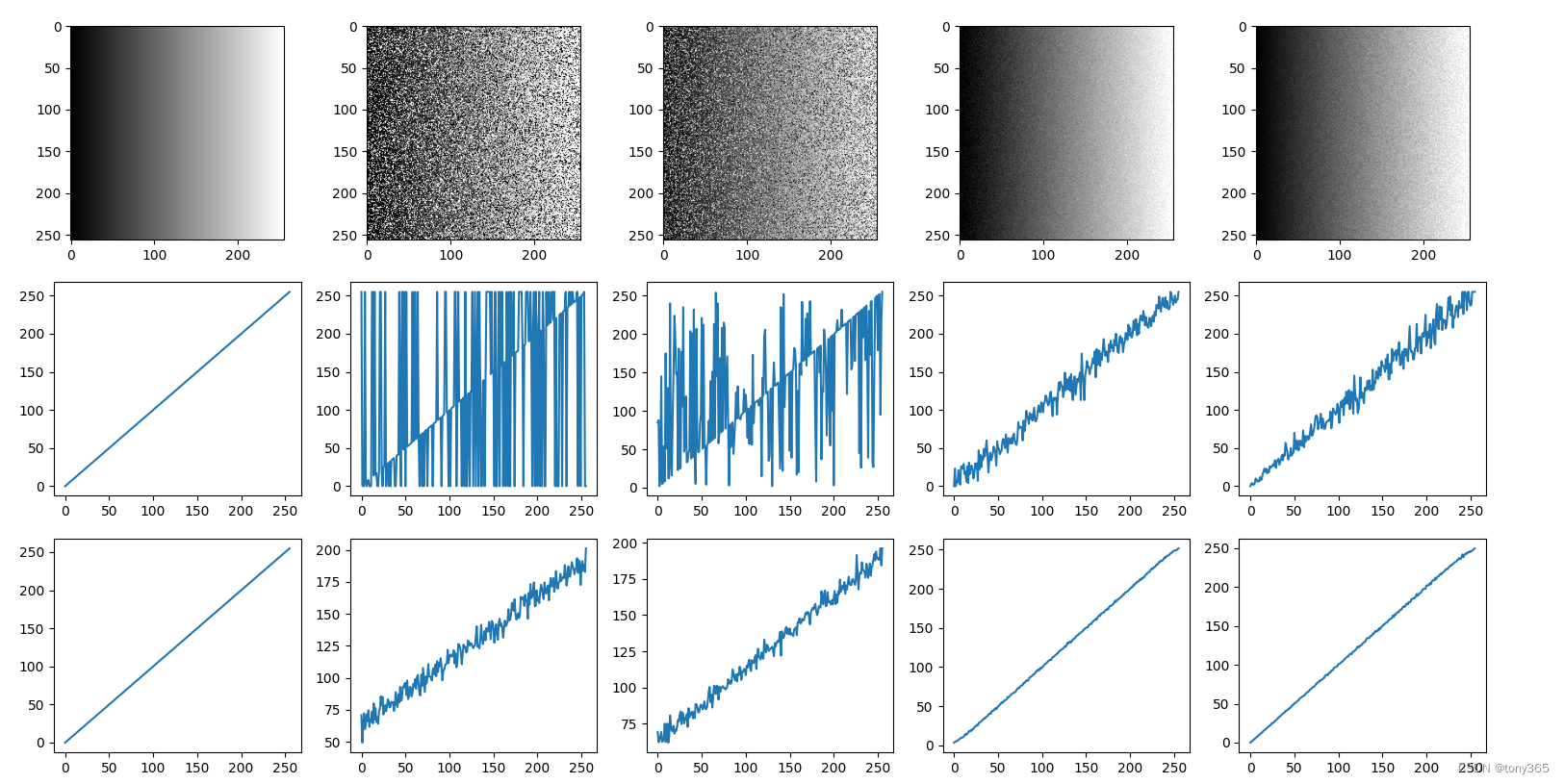
如下图:
- 第一行是原图像素值分别为0,1,2,3,4,5
- 第二行apply possion噪声
- 第三行使用异方差高斯近似表示possion噪声
- 第四行固定方差的高斯噪声。
一般情况下 异方差高斯可以比较准确的表达泊松噪声,但是特别小的时候略有差异
3. 异方差高斯 噪声模型(泊松和高斯噪声混合)
论文 Practical Poissonian-Gaussian noise modeling and fitting for single-image raw-data. 和 sidd:A High-Quality Denoising Dataset for Smartphone Cameras
提到将__泊松和高斯噪声__一起建模为 异方差高斯模型:
等式左边是方差, 右边y是无噪声图像值
beta1是与信号相关的 噪声参数,比如泊松噪声
beta2是与信号无关的 噪声参数,比如高斯噪声方差
怎么理解上面这个公式呢?
由于poisson分布可以近似为:

然后
P ( l a m d a ) + G ( s i g m a ) = G a u s s i a n ( l a m d a , l a m d a ) + G a u s s i a n ( 0 , s i g m a 2 ) = G a u s s i a n ( i m a g e , i m a g e ) + G a u s s i a n ( 0 , s i g m a 2 ) = i m a g e + g a u s s i a n ( 0 , i m a g e ) + G a u s s i a n ( 0 , s i g m a 2 ) = i m a g e + G a u s s i a n ( 0 , b e t a 1 ∗ i m a g e + b e t a 2 ) P(lamda) + G(sigma) \\ = Gaussian(lamda, lamda) + Gaussian(0, sigma^2) \\ = Gaussian(image, image) + Gaussian(0, sigma^2) \\ = image + gaussian(0, image) + Gaussian(0, sigma^2) \\ = image + Gaussian(0, beta1 * image + beta2) P(lamda)+G(sigma)=Gaussian(lamda,lamda)+Gaussian(0,sigma2)=Gaussian(image,image)+Gaussian(0,sigma2)=image+gaussian(0,image)+Gaussian(0,sigma2)=image+Gaussian(0,beta1∗image+beta2)
所以:
beta1 = 1,beta2 = sigma^2, image是实际无噪声像素值。

4. 几种噪声模型
如下图,分别是
原图, 椒盐噪声(50%的pixel被污染),随机噪声(50%的pixel被污染), 高斯噪声和 泊松噪声
5. 信噪比 SNR的计算方法是
均值 / 标准差
https://www.23bei.com/tool/920.html
6. Practical Poissonian-Gaussian noise modeling and fitting for single-image raw-data
这篇文章首先是建立一个poisson-gaussian模型:
参考本文第二节。
这种近似通常是非常准确的。对于较小的光子计数,光子噪声通常由其他与信号无关的噪声源主导,对于较大的光子计数,中心极限定理确保泊松分布接近高斯分布.
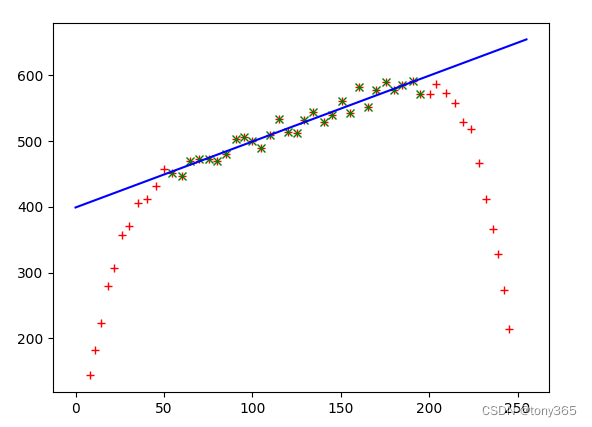
然后对beta1和beta2参数进行估计:
估计方法肯定是通过 均值 和 方差来拟合直线。
值为value = np.arange(0, 256, 5) 的若干个 patch(h=100pixel, w100pixel), 然后添加泊松噪声和高斯噪声。
计算出每块patch的均值作为 横坐标,
每块patch的方差作为纵坐标,
画出下图。
由于clip原因,在接近0和接近255的部分方差是不准确的(会下降),因此这里使用[50, 200]部分的点拟合直线,得到直线系数,即beta1, beta2。
https://blog.csdn.net/qq_34901691/article/details/119304917