在这篇博客中,我们将探讨如何使用高精度模型PP-YOLOE L进行车辆跟踪,并根据车辆的跟踪轨迹以及指定的违停区域判断是否违章停车。我们将介绍如何使用Python编写代码来实现这个功能,同时用到YOLOv5作为辅助模型。请确保您已经安装了Python和相关的库,如OpenCV、Numpy等。
目录
违章停车识别与车辆跟踪yolov5源码:车辆违停源码
1. 介绍
随着城市交通的日益拥堵,违章停车现象愈发严重。为了解决这个问题,我们需要一个实时的违章停车识别和车辆跟踪系统。在本文中,我们将详细介绍如何使用高精度模型PP-YOLOE L和YOLOv5实现这个功能。
2. 准备环境
首先,我们需要安装一些必要的库。为了方便起见,我们建议使用pip进行安装。请运行以下命令:
pip install opencv-python
pip install numpy
pip install torch
pip install torchvision
pip install ppyolo接下来,我们需要下载PP-YOLOE L和YOLOv5的预训练模型。您可以从官方GitHub仓库下载它们。
3. PP-YOLOE L模型介绍
PP-YOLOE L是一种高精度的目标检测模型,主要用于实时目标检测任务。与其他YOLO系列模型相比,PP-YOLOE L具有更高的检测精度和速度。本教程中,我们将使用PP-YOLOE L模型进行车辆目标检测。
4. YOLOv5模型介绍
YOLOv5是YOLO系列的一个分支,具有较高的检测精度和速度。在本教程中,我们将使用YOLOv5作为辅助模型,用于车辆识别和跟踪。
5. 车辆追踪
我们将使用PP-YOLOE L模型进行车辆目标检测,然后使用YOLOv5模型进行车辆识别和跟踪。详细代码如下:
import cv2
import numpy as np
import torch
import torchvision
import ppyolo
# 加载PP-YOLOE L模型
pp_yolo_el_model = ppyolo.load_model('path/to/your/ppyolo_el_model')
# 加载YOLOv5模型
yolov5_model = torch.hub.load('ultralytics/yolov5', 'yolov5s', pretrained=True)
def detect_and_track_vehicles(frame):
# 使用PP-YOLOE L模型进行车辆检测
detections = pp_yolo_el_model.detect(frame)
# 过滤出车辆目标
vehicles = [d for d in detections if d['label'] == 'car' or d['label'] == 'truck']
# 使用YOLOv5进行车辆识别和追踪
vehicle_tracks = yolov5_model.track(vehicles)
return vehicle_tracks
# 从摄像头或视频文件读取帧
cap = cv2.VideoCapture('path/to/your/video/file/or/camera')
while True:
ret, frame = cap.read()
if not ret:
break
# 检测并追踪车辆
vehicle_tracks = detect_and_track_vehicles(frame)
# 可视化结果
for track in vehicle_tracks:
# 绘制车辆边界框和ID
box = track['bbox']
id = track['id']
cv2.rectangle(frame, (box[0], box[1]), (box[2], box[3]), (0, 255, 0), 2)
cv2.putText(frame, f'ID: {id}', (box[0], box[1] - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
# 显示结果
cv2.imshow('Vehicle Tracking', frame)
# 按'q'键退出
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()6. 违章停车识别
在上一部分中,我们已经实现了车辆检测和跟踪。接下来,我们将根据车辆的跟踪轨迹以及指定的违停区域判断是否违章停车。代码如下:
def is_illegal_parking(track, no_parking_zones):
# 判断车辆是否在违停区域停留超过指定时间(例如30秒)
for zone in no_parking_zones:
if track['time_in_zone'] >= 30:
return True
return False
# 定义违停区域(示例)
no_parking_zones = [
{'x1': 100, 'y1': 100, 'x2': 300, 'y2': 300},
{'x1': 400, 'y1': 400, 'x2': 600, 'y2': 600},
]
# 检测违章停车
illegal_parked_vehicles = []
for track in vehicle_tracks:
if is_illegal_parking(track, no_parking_zones):
illegal_parked_vehicles.append(track)
# 打印违章停车车牌号
for vehicle in illegal_parked_vehicles:
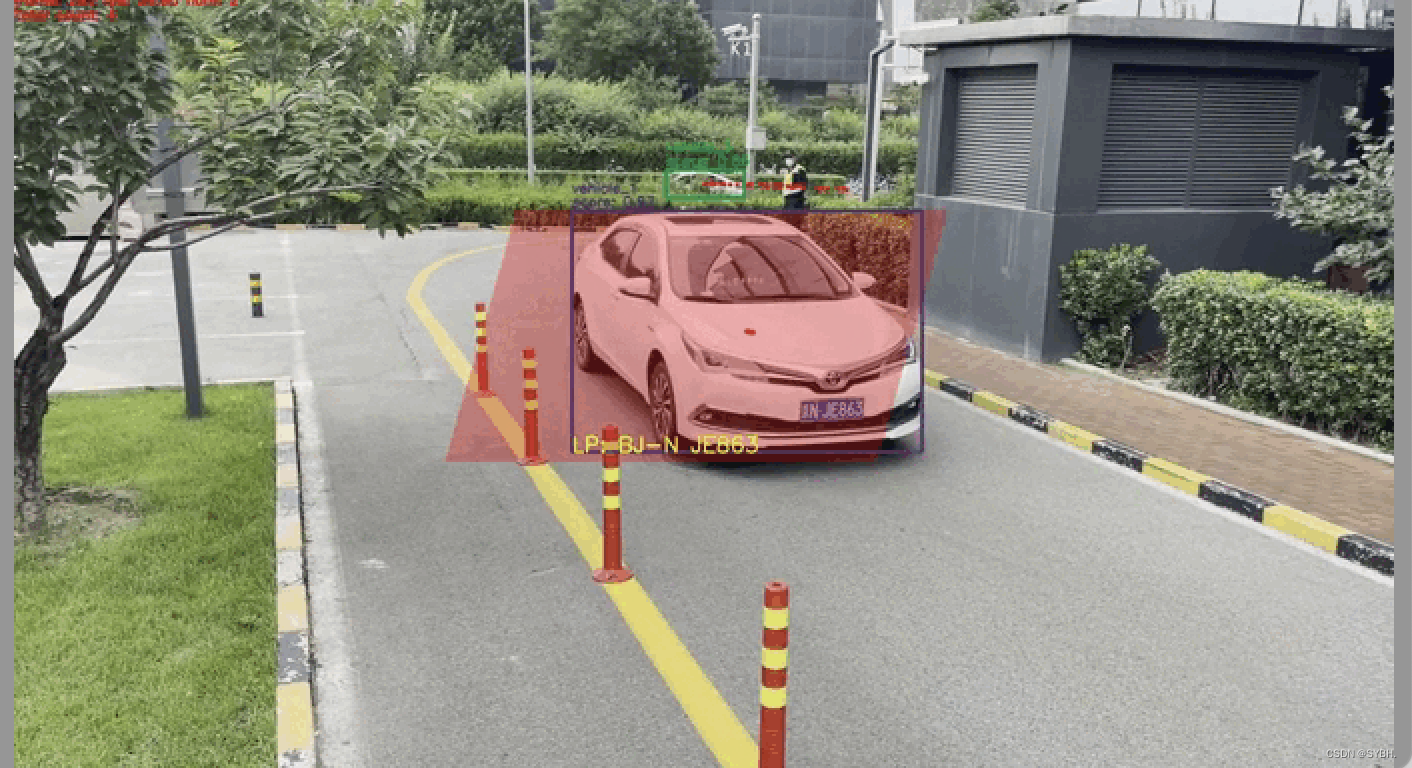
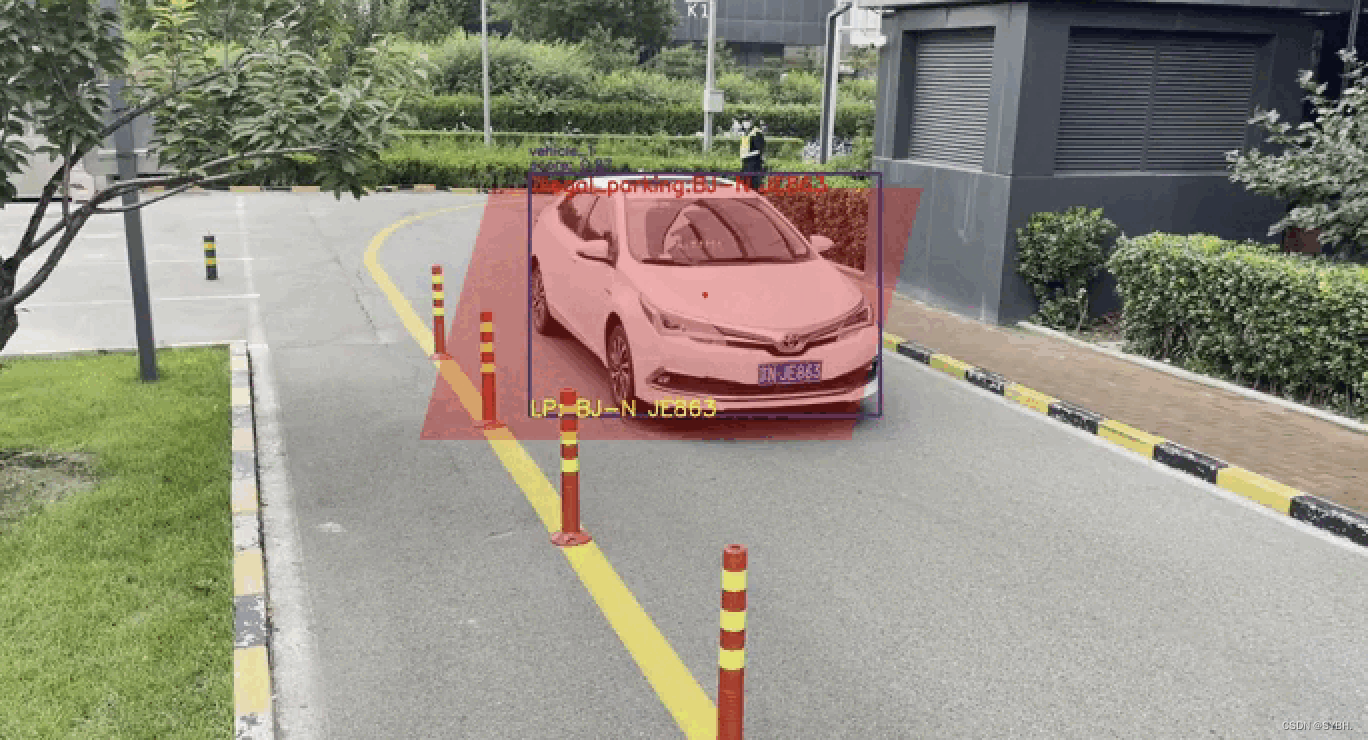
print(f'违章停车车牌号:{vehicle["license_plate"]}')7. 结果展示
在本教程中,我们使用了PP-YOLOE L和YOLOv5模型来检测和跟踪车辆,然后根据车辆的跟踪轨迹以及指定的违停区域判断是否违章停车。最后,我们将违章停车的车辆车牌号打印在屏幕上。
8. 结论
在本文中,我们学习了如何使用高精度模型PP-YOLOE L进行车辆跟踪,并根据车辆的跟踪轨迹以及指定的违停区域判断是否违章停车。我们还介绍了如何使用Python编写代码来实现这个功能,同时用到YOLOv5作为辅助模型。这种方法可以有效地识别和跟踪车辆,判断是否违章停车,从而帮助城市管理部门更好地维护城市交通秩序。
通过本教程,您将能够编写自己的车辆追踪和违章停车识别系统。您可以根据实际需求调整追踪参数和违停区域。我们希望这篇教程对您有所帮助,感谢您的阅读!