项目演示视频
项目获取地址及演示视频:https://www.7claw.com/51247.html
项目简介
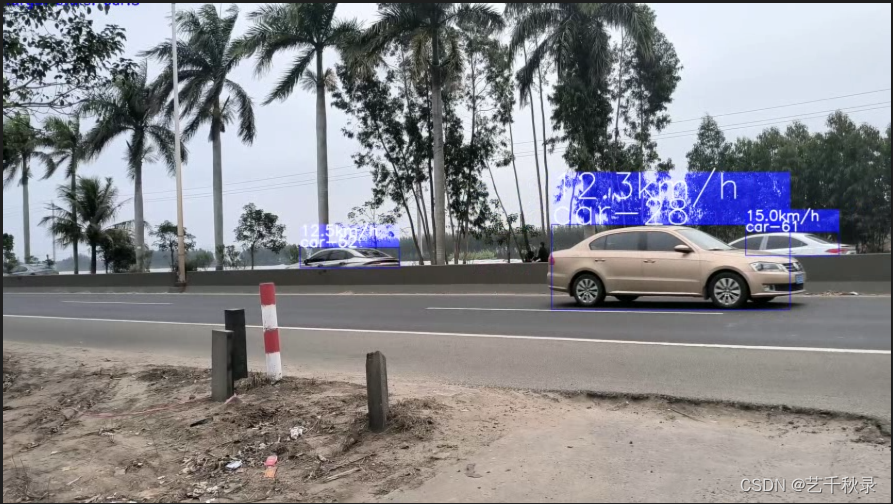
本项目使用Yolov5+DeepSort实现车辆、行人跟踪,并实时统计各类别目标数量,以及测量目标运动速度、加速度,对于超速的车辆进行标记保存。
- 项目支持对高分辨率的视频进行检测,可以使用滑动窗口检测,具体的做法就是按照指定的滑动步长以及窗口大小,对每一帧的图片进行切割,例如切割成512*512的大小的切片输入到模型中进行推理,然后对所有切片的推理结果进行合并,合并时需要再进行一次非极大值抑制,以去掉不同切片检测到的重叠框。
- 本项目的预训练模型使用的是YOLOv5官方提供的yolov5s预训练权重,用户可以自行更换自己的模型权重文件。
- 本项目可以指定需要检测的类别,并实时统计每一帧中各类别的目标数量。
- 本项目可以实时统计各个目标的移动速度、加速度。
- 对于超速的车辆,可以将其进行标记保存,便于交通部门的管理。
主函数
if __name__ == '__main__':
#Adding necessary input arguments
parser = argparse.ArgumentParser(description='test')
parser.add_argument("--model_path", default="./weights/yolov5s.pt", type=str,help ='预训练模型的路径')
parser.add_argument('--input_path',default='./mytest.mp4', type=str,help ='输入视频文件路径')
parser.add_argument('--output_dir',default = './mytest', type=str,help='输出检测结果保存路径')
parser.add_argument("--is_split",default=False, action="store_true",help="是否对视频的每一帧图片进行切割检测(自动合并)")
parser.add_argument("--subsize",default=512, type=int, help="切割每一帧时指定的切片大小")
parser.add_argument("--gap", default=100, type=int, help="滑动窗口的重叠部分的像素长度,值越大,滑动窗口步长越小")
parser.add_argument("--num_process",default=8,type=int,help="使用的进程个数")
parser.add_argument("--names", default=['bus', 'car', 'truck', "person"],type=list,help="需要检测的目标")
parser.add_argument("--conf_thresh", default=0.2, type=float, help="合并切片时需要再次进行NMS去除重复框")
parser.add_argument("--iou_thresh", default=0.4, type=float, help="合并切片时需要再次进行NMS去除重复框")
parser.add_argument("--speed_thresh", default=10, type=int, help="设定车辆速度上限阈值,如果超过该阈值就会被记录下来, 单位是千米/小时,-1则表示关闭速度检测")
parser.add_argument("--pro_speed_thresh", default=-1, type=int, help="设定车辆加速度上限阈值,如果超过该阈值就会被记录下来, 单位是米/平方秒,-1则表示关闭加速度检测")
args = parser.parse_args()
main(args)
主要函数
def update_tracker(args, target_detector, image, fps):
new_faces = []
allbboxes = []
cls_idlist = []
if args.is_split:
# 首先将当前帧存入指定的临时文件夹中
args.splitDir = os.path.join(args.output_dir,"splitDir")
if not os.path.exists(args.splitDir):
os.makedirs(args.splitDir)
tmpdir = os.path.join(args.splitDir,"tmp")
tmpdir2 = os.path.join(args.splitDir,"tmp_split")
if not os.path.exists(tmpdir):
os.makedirs(tmpdir)
if not os.path.exists(tmpdir2):
os.makedirs(tmpdir2)
cv2.imwrite(os.path.join(tmpdir,"tmp.png"),image)
split = splitbase(tmpdir,
tmpdir2,
gap=args.gap,
subsize=args.subsize,
num_process=args.num_process)
split.splitdata(1) # 1表示不放缩原图进行裁剪
for filename in os.listdir(tmpdir2):
filepath = os.path.join(tmpdir2,filename) # tmp__1__0___0
yshfit = int(filename.split("___")[1].split(".")[0])
xshfit = int(filename.split("__")[2])
img = cv2.imread(filepath)
_, bboxes = target_detector.detect(img) # 检测器推理图片
for x1, y1, x2, y2, cls_id, conf in bboxes:
cls_idlist.append(cls_id)
x1 += xshfit
y1 += yshfit
x2 += xshfit
y2 += yshfit
allbboxes.append([x1,y1,x2,y2,conf.cpu()])
else:
_, bboxes = target_detector.detect(image) # 检测器推理图片
for x1, y1, x2, y2, cls_id, conf in bboxes:
cls_idlist.append(cls_id)
allbboxes.append([x1,y1,x2,y2,conf.cpu()])
allbboxes = np.array(allbboxes)
keep = list(range(allbboxes.shape[0])) if not args.is_split else py_cpu_nms(allbboxes,thresh=args.iou_thresh)
bboxes = allbboxes[keep]
clss = []
for idx in keep:
clss.append(cls_idlist[idx])
bbox_xywh = []
confs = []
for x1, y1, x2, y2, conf in bboxes:
obj = [
int((x1+x2)/2), int((y1+y2)/2),
x2-x1, y2-y1
]
bbox_xywh.append(obj)
confs.append(conf)
# clss.append(cls_id)
xywhs = torch.Tensor(bbox_xywh)
confss = torch.Tensor(confs)
outputs = deepsort.update(xywhs, confss, clss, image)
bboxes2draw = []
face_bboxes = []
current_ids = []
for value in list(outputs):
x1, y1, x2, y2, cls_, track_id = value
bboxes2draw.append(
(x1, y1, x2, y2, cls_, track_id)
)
current_ids.append(track_id)
if cls_ == 'face':
if not track_id in target_detector.faceTracker:
target_detector.faceTracker[track_id] = 0
face = image[y1:y2, x1:x2]
new_faces.append((face, track_id))
face_bboxes.append(
(x1, y1, x2, y2)
)
# 计算每个目标的速度和加速度大小
speed_list,speed_pro_list,speed_pro_change_list = get_speed_for_obj(bboxes2draw, fps)
ids2delete = []
for history_id in target_detector.faceTracker:
if not history_id in current_ids:
target_detector.faceTracker[history_id] -= 1
if target_detector.faceTracker[history_id] < -5:
ids2delete.append(history_id)
for ids in ids2delete:
target_detector.faceTracker.pop(ids)
print('-[INFO] Delete track id:', ids)
image = plot_bboxes(args, image, speed_list, speed_pro_list, speed_pro_change_list, bboxes2draw)
return image, new_faces, face_bboxes
完整项目的获取方式请查看:https://www.7claw.com/51247.html