| * | # |
|---|---|
| 链接 | https://ieeexplore.ieee.org/abstract/document/9585846 |
| 题目 | A Classification of Augmented Reality Approaches for Spatial Data |
Visualization
关键词 | Geographic visualization
核心点
尽管我们可以在AR文献中找到针对AR应用的多种分类方案,但据我们所知,目前还没有专门针对AR应用的空间方面的分类,即可视化大小、规模以及对用户物理环境的确认和对齐。因此,不存在专门适用于地理空间科学的AR分类。
一、文章主要解决的问题及解决方案:
1)待解决的问题
目前还没有具体而广泛地讨论增强现实的空间方面的分类。
2)文章的主要工作
提供了一种通过识别AR的不同空间性质来分类的分类方法。
文献综述
Hugues[13]现在AR方法分类:一个旨在增强现实呈现一个真实的元素相关的信息,其他人工环境,旨在创造一个完全不对应于一个真实的元素。
Normand[30]对现有的AR分类进行了元回顾,确定了AR分类的四个主要类别(以技术为中心、以用户为中心、以信息为中心、以交互为中心)。他们进一步提出了一种由三个核心轴和一个可选项(跟踪所需的自由度、可视化模式、内容的时间基础和可选的呈现模式)组成的新分类法。
M¨uller et al.[28]提出了一种将数字信息与现实对象连接起来的可视化方法的分类方法,特别关注用于沟通虚拟和现实之间的空间关系的不同方法。
Zollmann et al.[45]提出了一个更全面的AR可视化分类,旨在为没有广泛技术背景的AR研究人员和开发人员提供应用AR可视化技术的必要信息。他们的AR可视化分类确定了六个不同的重复出现的轴:可视化目的、虚拟数据可视性、虚拟线索、数据过滤、可视化抽象和合成。
二、分类轴
he four axes we have identified are:
1.the visualization size that relates to the extents of the visualization itself; 2.the visualization scale that relates to how much larger or smaller the presented virtual data is in relation to the real world system that it is describing;
3.the level of acknowledgement of the user’s physical environment
that relates to whether the AR application takes into account the
morphology of the physical environment within which it is deployed
4/the view alignment methods that relate to how the AR
application attempts to align the virtual objects with the physical
environment around them.
三、 Visualization Size
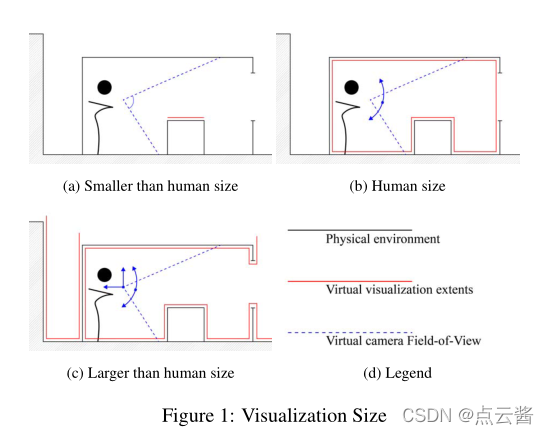
可视化大小和可视化范围有关
a)可视化尺寸比人小。虚拟对象的整体可以从一个角度感知,而不需要改变视角或位置。这类例子可以在3D物体重建[44]和通过AR[1]增强纸质地图中找到。

b) 可视化尺寸和人差不多。这种可视化不需要改变位置来体验虚拟世界,但需要改变相机的方向,即用户需要旋转相机来完全感知可视化。在增强现实中,这种方法经常发生在一个单独的房间中
c) 可视化尺寸比人大。需要在位置和方向上进行改变,以完全理解其整体的可视化。在地理空间领域,这种可视化通常跨越大型建筑或城市环境的大小。这类方法的例子在研究广域虚拟环境[34]、寻路和导航[29]以及城市增强现实方法的工作中被发现[17,31]。
Visualization Scale
 1:1–>这意味着它们呈现时不会对观看者改变大小。这一类的例子可以在3D对象重建[44]中找到,重建的对象被呈现在源(真实世界)对象上。
1:1–>这意味着它们呈现时不会对观看者改变大小。这一类的例子可以在3D对象重建[44]中找到,重建的对象被呈现在源(真实世界)对象上。
小尺寸–> 按比例缩小。地理空间科学中使用得最多。
放大尺寸–> 这种可视化通常出现在关注微系统的领域,其内部工作和相互关系对人眼来说并不明显,这类可视化的典型例子包括生物学中的增强现实应用。
Acknowledgement of User Physical Environment
最明显的问题是遮挡(真实物体必须遮蔽虚拟物体的一部分)和反射(虚拟反射表面反映真实世界的环境)。
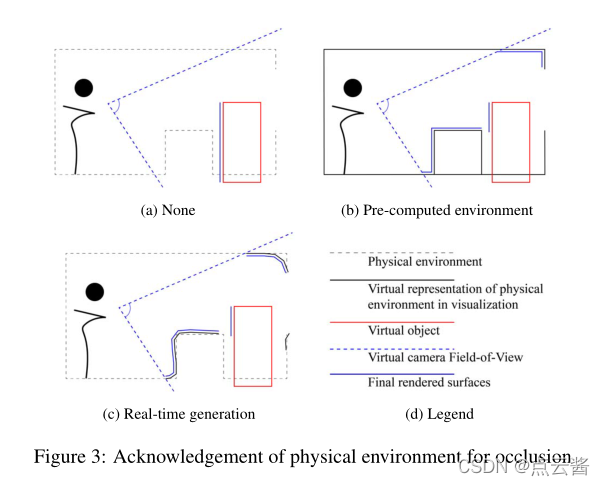
1)完全不确定虚拟环境。AR应用程序没有关于真实世界环境的信息,所有渲染问题都忽略了这一点,即使在查看者预期它们会被物理对象遮挡的情况下,虚拟对象也经常在物理环境中渲染。
2)第二种类型是预计算环境,环境的物理属性预先对AR应用程序可用,应用程序可以在运行时检索这些信息,让虚拟对象根据需要作出响应,并在虚拟和真实之间提供一个更“真实”的混合视图。在遮挡场景中,这将导致虚拟物体被“前面”的真实物体遮挡(图3b),这通常是通过预先开发物理环境的3D模型来实现的。在涉及反射的场景中,这是通过在高动态范围(HDR)中预先捕获环境中的光线条件来生成HDR映射来实现的。
3)实时生成。这些情况下,AR应用程序在运行时使用算法来识别和生成现场环境,无论是生成真实世界物体[33]的虚拟3D网格,还是捕捉用于反射[41]的光线条件。
View Alignment Methods
1)没有对齐。AR应用程序不会以任何有意义的方式将虚拟空间与物理空间对齐。
2)基于标记对齐。它们利用基准标记将虚拟环境与物理环境对齐。AR应用程序通过其成像传感器(如摄像头)以某种形式对其进行了配置,以识别这些对象。通过这种设置,当AR应用程序识别出物理标记在视图中时,它可以计算出视图的角度和设备相对于标记的距离,从而实现物理视图和虚拟视图之间的对齐。
3)通过物理形状校准。使虚拟和物理环境通过识别独特的形态特征在用户周围的物理环境所捕获的基于“增大化现实”技术设备的成像传感器,和随后跟踪设备的位置和姿态的变化相对于帧识别特性。例如:SLAM。
4)地理位置对齐。利用设备的GPS传感器首先把虚拟环境在地球表面上的一个特定位置,随后利用惯性和其他传感器(加速度计、罗盘等)来跟踪设备的运动空间。
四、总结讨论
我们认为两个轴已经完全定义了范畴范围,一个已经基本定义,一个仍然是开放的。更具体地说,第一个两个轴(可视化大小和规模)与空间属性都进行了广泛的研究和探讨在其他领域(尤其是地理和认知心理学)和已经定义范围内的领域,因此被认为是完全定义的范围。
对于第三个轴(承认物理环境),我们期望这里提出的类别包含所有可能的选择(一个类别用于预计算方法,一个类别用于实时方法,一个类别用于不存在方法),会随着技术而细分。
最终的轴(视图对齐方法)是一个主要由技术创新驱动的轴,因此我们确定可能需要在以后引入重大的更改,因此我们认为这个分类轴仍然是开放的。
本文提出的分类轴被认为是相互独立的,这意味着AR应用可以用任何轴类的组合来描述,轴之间没有明显的限制。
例如,如果AR可视化的目的是在放大的视图中提供一些复杂机器的详细视图,那么物理环境遮挡可以被忽略,因为物理边界只会阻碍可视化。另一方面,一个室内导航和寻路AR系统需要在任何时候都考虑到用户的物理环境,以视觉上和更清晰地显示与用户环境相关的方向。