COLMAP是一种通用的运动结构(Structure-from-Motion(SfM))和多视图立体(Multi-View Stereo(MVS))管道(pipeline),具有图形和命令行界面.它为重建有序和无序图像集合提供了广泛的功能。源码地址为https://github.com/colmap/colmap,最新发布版本为3.8,其License为BSD. 它支持在Windows、Linux、Mac上安装.
COLMAP在Windows上的安装及通过2D序列图像进行3D重建:
(1).从NVIDIA官网下载cuda 11.1即cuda_11.1.1_456.81_win10.exe,点击此exe进行安装,通过编译执行samples中的deviceQuery和bandwidthTest验证本机是否支持cuda 11.1;
(2).从https://github.com/colmap/colmap/releases/tag/3.8 下载COLMAP-3.8-windows-cuda.zip,解压缩;
(3).双击COLMAP.bat,打开界面如下图所示:
(4).点击File --> New project: 如下图所示:其中Database,点击New,选中目录后,手动输入database.db(名字可任意指定); Images,点击Select,选择images所在的目录,这里以lego为例,可从http://cseweb.ucsd.edu/~viscomp/projects/LF/papers/ECCV20/nerf/nerf_example_data.zip下载 ,如下图所示,点击Save,此时会在E:/lego目录下生成database.db

(5).点击Processing --> Feature extraction,将Camera model调整为PINHOLE,其它使用默认值,如下图所示:点击Extract,进行特征提取,写入database.db

(6).点击Processing --> Feature matching,使用默认值,如下图所示:点击Run,进行特征匹配,写入database.db

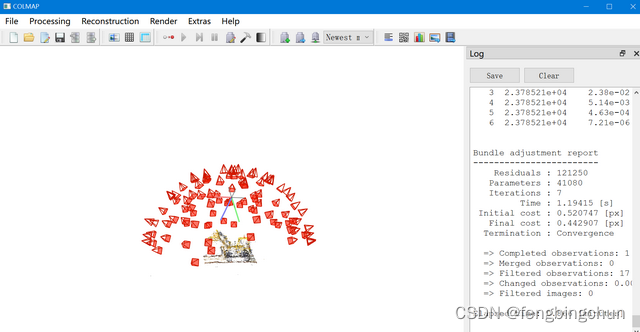
(7).点击Reconstruction --> Start reconstruction, 自动进行重建,结果如下图所示:
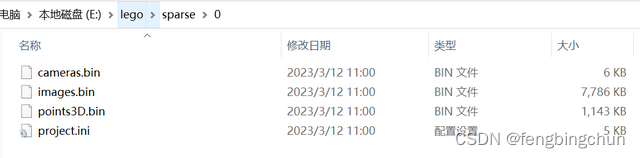
(8).在images同目录下手动新建sparse/0目录,点击File --> Export model,选中0目录后,0目录下会生成cameras.bin, images.bin, points3D.bin, project.ini四个文件,如下图所示:
可通过conda安装,执行如下命令即可:
conda install -c conda-forge colmap