论文题目:《PointFlow: 3D Point Cloud Generation with Continuous Normalizing Flows》
看了这篇论文,对论文进行了一些总结,希望对大家有帮助~
这篇论文是ICCV会议上的一篇论文,发表时间是2019年
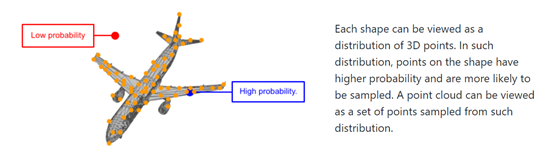
Idea: 对应于物体的点云被认为是物体表面的分布中的样本,而物体本身被认为是物体形状分布中的样本。提出PointFlow用于三维点云的原则性生成模型。学习分布的分布,前者是形状的分布,后者是给定形状的点的分布。
方法: 不直接对形状中点的分布进行参数化,而是将这种分布建模视为来自先验分布(例如:三维高斯)的三维点的可逆参数化转换。在这个模型中,为给定形状生成点需要从标准高斯先验中采样点,然后根据这个参数化变换将它们移动到目标形状中的新位置。

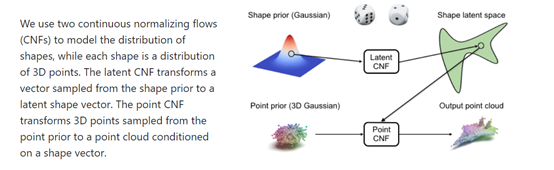
创新点: 提出连续归一化流(Continuous Normalizing Flow,CNF)。完整的生成模型由两级连续归一化流组成,一个是对潜变量的分布建模来对形状分布进行建模,另一个是对给定形状的点分布建模。除此之外,引入了一个推理网络,从点云中推断出潜变量分布。可以端到端进行训练。

优势: 变换的可逆性使得可以不只是抽样,而且能估计概率分布密度,从而能用变分推断的框架来训练模型。使用这个概率框架训练模型,可以避免训练GAN的困难,也避免了设计点集之间距离度量的困难。
输入: 通过CNF采样的点x
输出: 点云
日常学习记录,一起交流讨论吧!侵权联系~