Why Discard if You can Recycle?:A Recycling Max Pooling Module for 3D Point Cloud Analysis
如果可以回收,为什么要丢弃?:用于 3D 点云分析的回收最大池化模块
大多数三维点云分析模型都致力于开发新的网络结构或更有效的模块来聚集局部邻域的点特征。 无论网络结构还是改进的特征学习方法,这些模型都有一个共同点,那就是最终使用最大池化来获得置换不变特征。 我们首先证明了这种传统的方法只使一小部分三维点贡献了置换不变特征,而丢弃了其余的点。

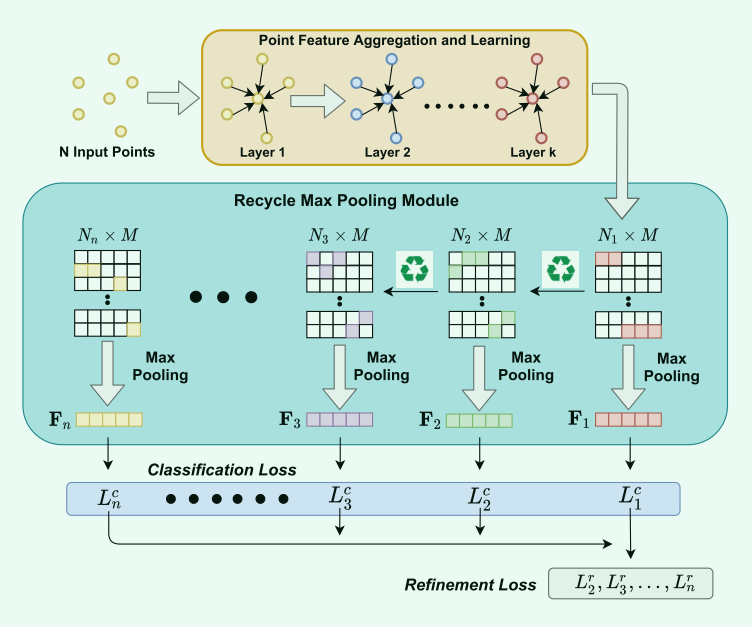
为了解决这一问题,并提高任何基线三维点分类或分割模型的性能,我们提出了一个新的模块,称为回收maxpooling(RMP)模块,以回收和利用一些被丢弃的点的特征。
我们引入了一个精化损失,使用回收的特征来精化 从传统的最大池化保存的特征中获得的预测损失。这是第一个探索回收传统上被最大池化丢弃的仍然有用的点的工作。 我们通过将RMP模块结合到几个里程碑基线和最先进的网络中来实现点云分类和室内语义分割任务,证明了该模块的有效性。 在使用相同的基本网络实现和超参数的情况下,持续地提高了所有测试网络的性能。
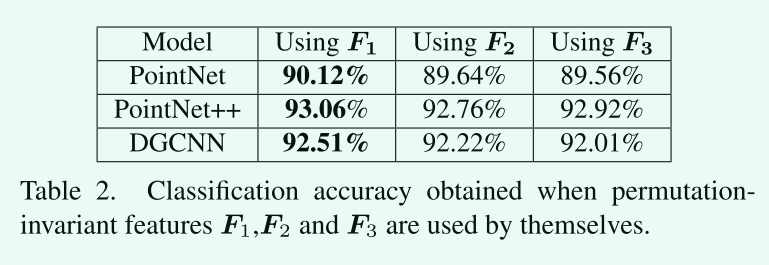
作者发现在经过MaxPooling后,保留点更多的网络模型所得的精确度更高,这是一个实验出发点

(使用传统最大池的不同模型的点利用率分析; 不利用大多数点的特征的模型精度较低。 )
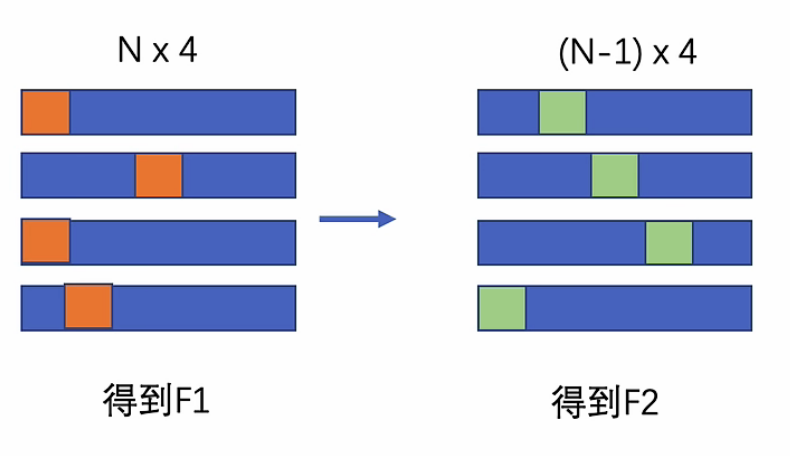
关于丢弃点特征的实验观察:
被丢弃的点也可以带来很好的特征,故进行循环回收池化
RMP模块简图: