一,输入捕获原理
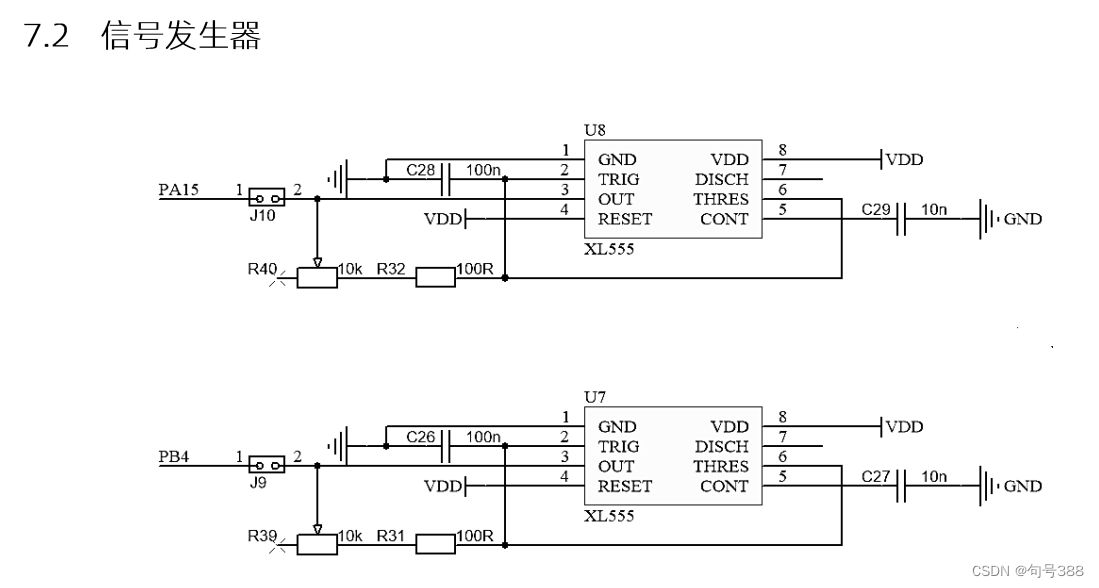
利用单片机采集555定时器电路,PB4口的pwm信号的频率。
因此不用考虑溢出问题。
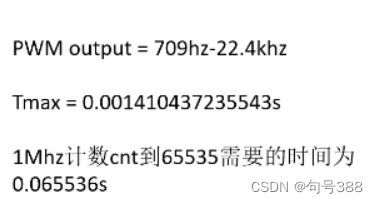
出现一次上升沿捕获一次CNT寄存器的值,两次上升沿的时间差就是PWM的周期,也就间接算出了频率。要将主频80MHZ分频成1MHZ。
二,有关cubemax的相关配置
1,将模式配置为复位模式,选择触发源,是根据外部输入触发的。
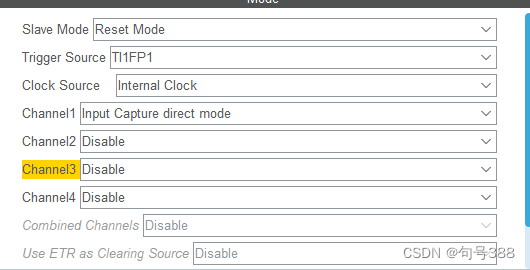
2,将PB4口配置成定时器三的通道一

3,配置定时器的相关参数

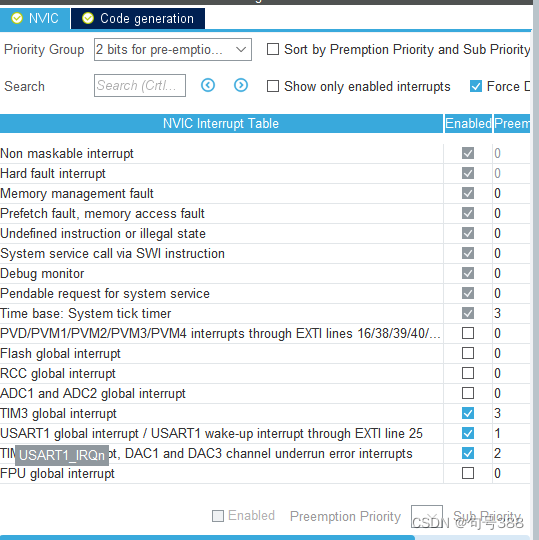
4,进行中断的相关配置
四,keil移植
.c
#include "pwm/bsp_pwm.h"
TIM_HandleTypeDef htim3;
/* TIM3 init function */
void PWM_Channel1_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_SlaveConfigTypeDef sSlaveConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
htim3.Instance = TIM3;
htim3.Init.Prescaler = 79;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 65535;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_IC_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sSlaveConfig.SlaveMode = TIM_SLAVEMODE_RESET;
sSlaveConfig.InputTrigger = TIM_TS_TI1FP1;
sSlaveConfig.TriggerPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sSlaveConfig.TriggerFilter = 0;
if (HAL_TIM_SlaveConfigSynchro(&htim3, &sSlaveConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
if (HAL_TIM_IC_ConfigChannel(&htim3, &sConfigIC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
}.h
#include "main.h"
void PWM_Channel1_Init(void);
extern TIM_HandleTypeDef htim3;
main,h
初始化相关
PWM_Channel1_Init();
HAL_TIM_Base_Start(&htim3);
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_1);中断相关
1)中断服务函数
在it.c里面
void TIM3_IRQHandler(void)
{
/* USER CODE BEGIN TIM3_IRQn 0 */
/* USER CODE END TIM3_IRQn 0 */
HAL_TIM_IRQHandler(&htim3);
/* USER CODE BEGIN TIM3_IRQn 1 */
/* USER CODE END TIM3_IRQn 1 */
}2)回调函数---真正执行的地方
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
PWM1_T_Count = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_1)+1;
}
}
显示相关
sprintf((char*)Lcd_Disp_String,"PWM1:%06d",(unsigned int)(1000000/PWM1_T_Count));
LCD_DisplayStringLine(Line6,Lcd_Disp_String); 要注意一下正版的比赛板子和抄的板子pwm的取值范围不一样,亮红灯的是抄的板子。
五,双通道捕获pwm频率和占空比
1,原理和单通道捕获一样只是需要再cubemax上配置一下,

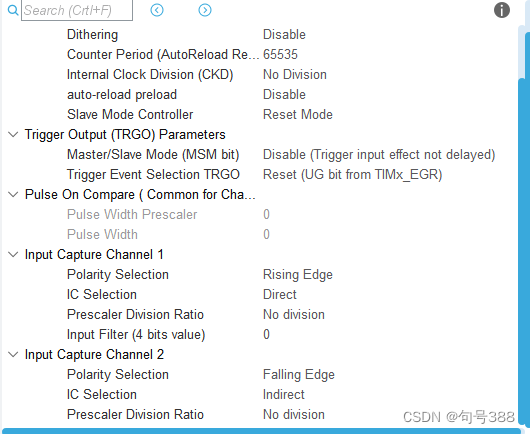
通道二采用间接捕获的方式,配置为捕获下降沿。
有关占空比的配置,因为两个通道一个捕获的是下降沿,一个捕获的是上升沿,因为复位模式是没接收到上升沿或者下降沿就会触发中断,然后将CNT中的值清零。上升沿和下降沿的时间差就是高点平的时间,除以周期得到的就是占空比。