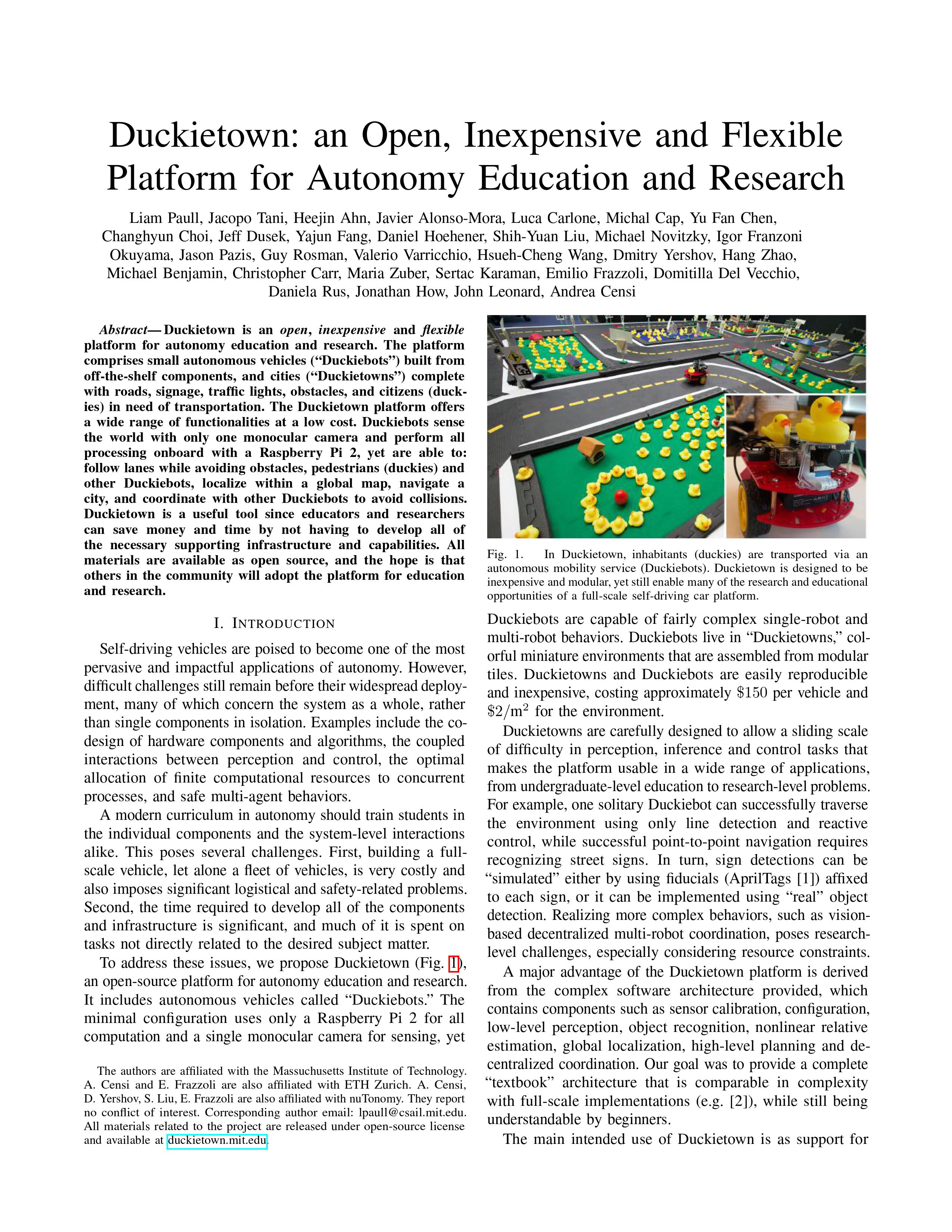
MIT小黄鸭无人车(Duckietown is a robotics educations and outreach effort.)
课程官网如下,点击图片可直接进入(旧版链接:http://duckietown.mit.edu/):


----重要资料----必备基础ROS+Gazebo+Python等。
github:https://github.com/duckietown/
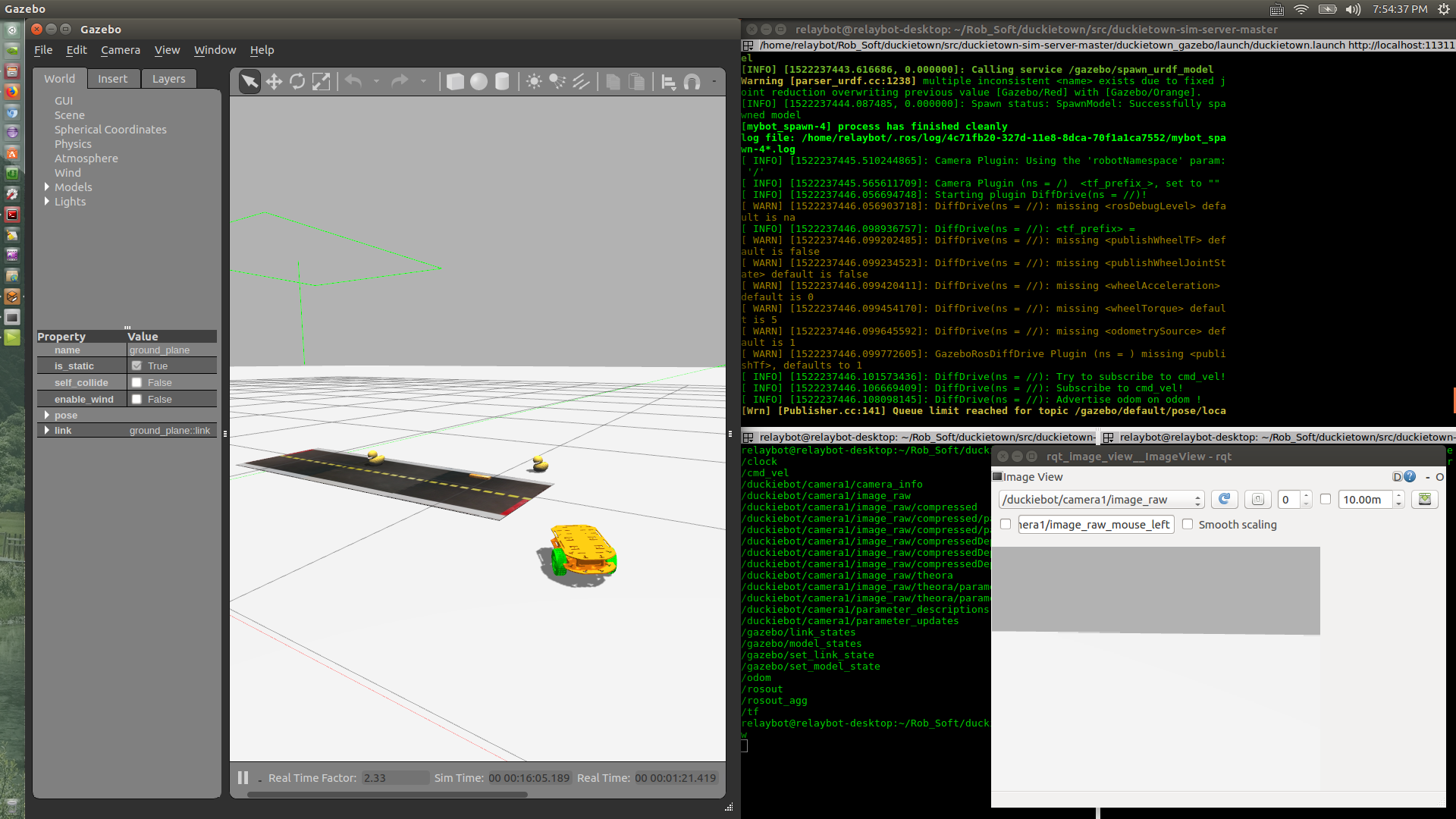
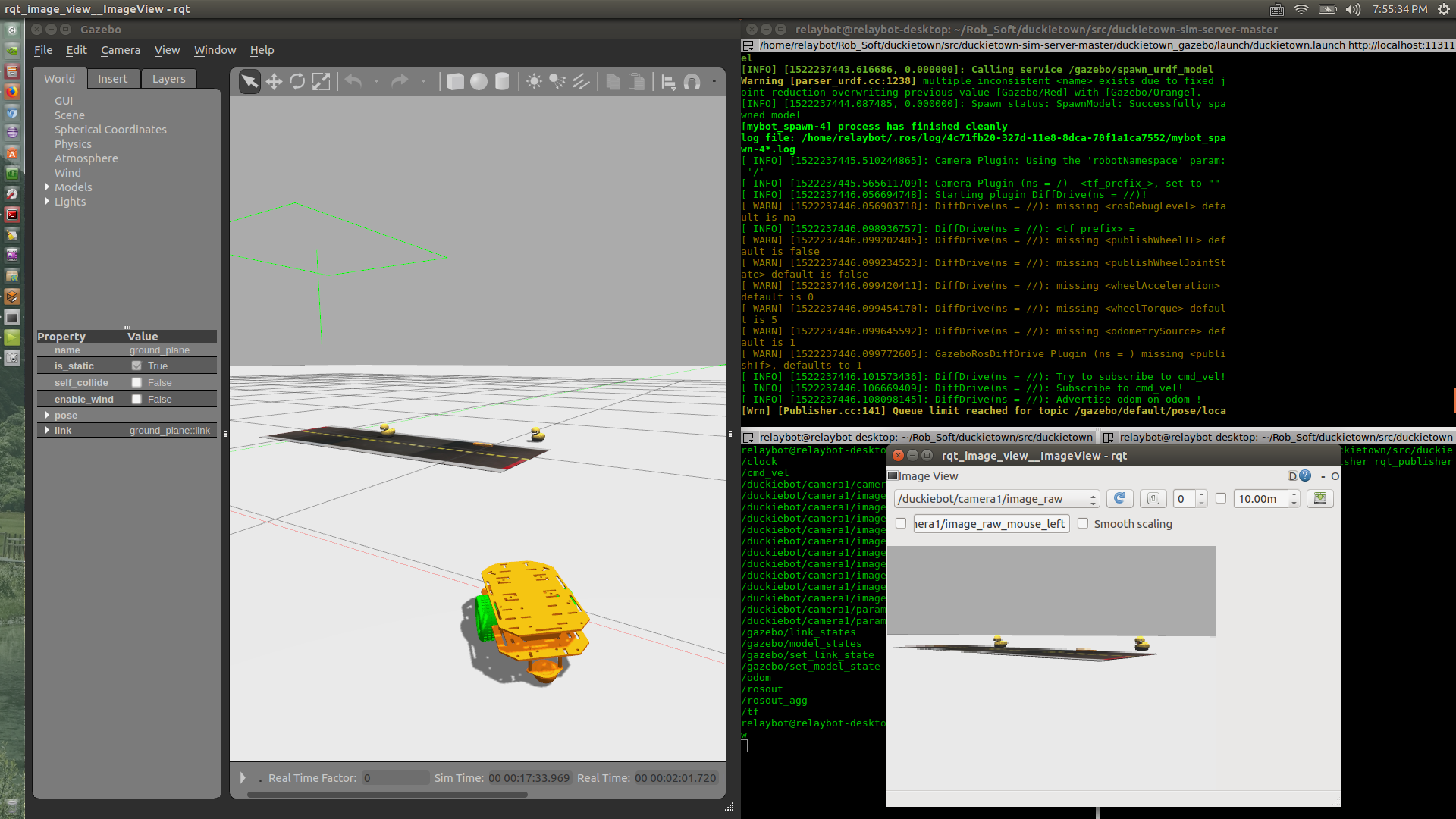
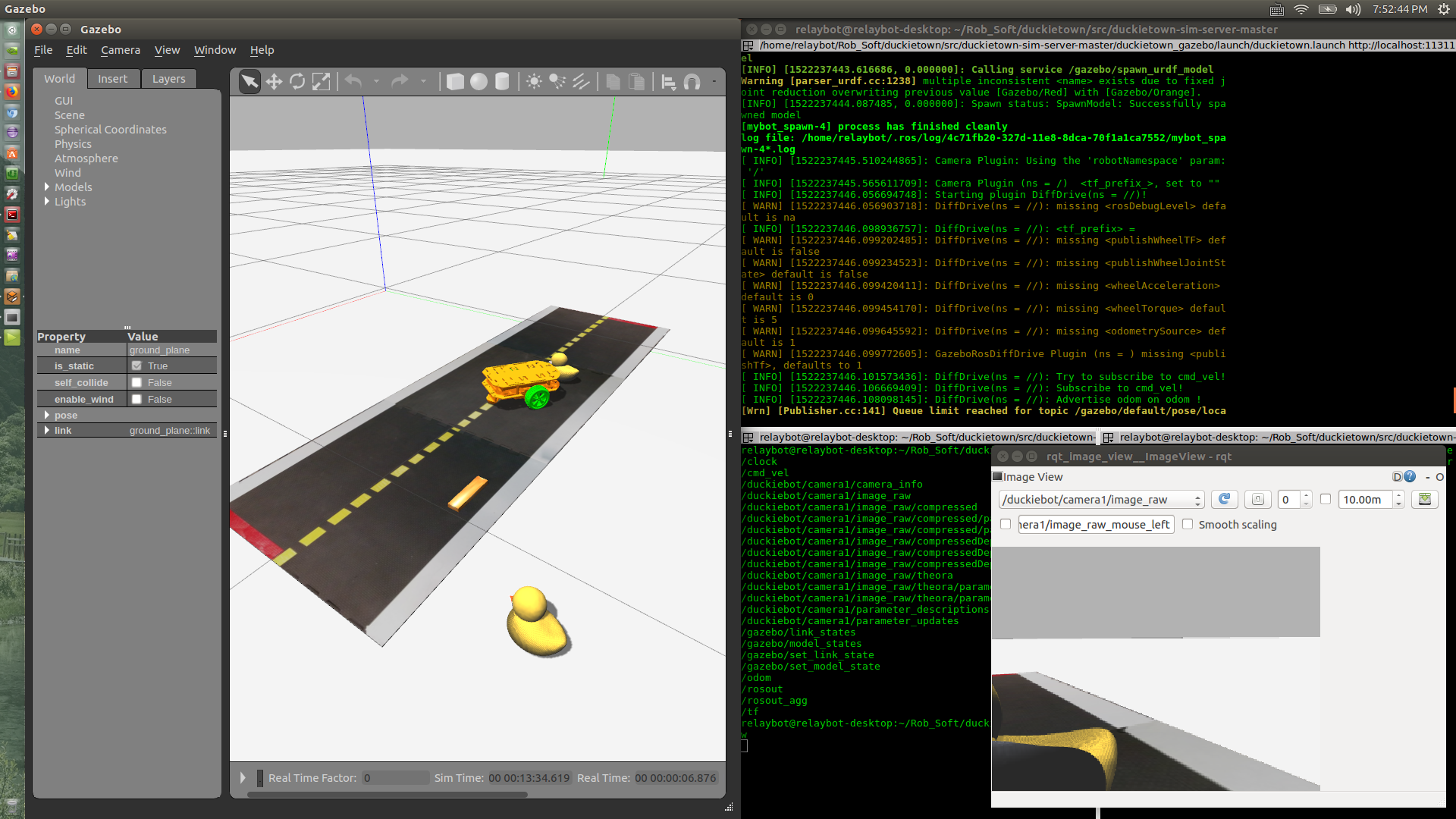
如果没有实物可以尝试gazebo仿真,效果如下:
----
Duckietown Environment and Duckiebot in gazebo
With this folder, you can run duckietown environment and control robot with gazebo.
Install Depencencies
Requirements:
- Python 2
- ROS Kinetic
- Gazebo 7 (not Gazebo 8!)
NOTE: To build successfully, maybe you need to install a lot ros packages. Based on the error message, use sudo apt-get install ros-kinetic-packagename.
TODO: complete the list of depencencies to install.
sudo apt-get install \
ros-kinetic-xacro
# Python packages
pip install \
catkin_pkg \
catkin-tools \
defusedxml \
pyzmq \
rospkg \
pygazebo==3.0.0-2014.1
Build and run duckietown environment with a duckiebot
source /opt/ros/kinetic/setup.bash
cd simulator
catkin build
source devel/setup.bash
cd src/duckietown_gazebo
source env_gazebo.sh
cd ..
./run_gazebo.sh
You will see a Duckiebot in Duckietown now.
In gazebo, shortcut "Ctrl+T" can call out "Gazebo: Topic Selector" window. Then click topic /gazebo/default/mybot/chassis/camera1/imageunder gazebo.msgs.ImageStamped, a camera window of dockiebot will show up.
You can also control robot through publish messege to topic with command rostopic pub /cmd_vel geometry_msgs/Twist "linear: x: 0.2 y: 0.0 z: 0.0 angular: x: 0.0 y: 0.0 z: 0.1" or ./run_cmd
----课程详细介绍,英文原文:





----