CompHub 实时聚合多平台的数据类(Kaggle、天池…)和OJ类(Leetcode、牛客…)比赛。本账号会推送最新的比赛消息,欢迎关注!
更多比赛信息见 CompHub主页
以下内容摘自比赛主页(点击文末阅读原文进入)

Part1赛题介绍
题目
ICRA 2023 | The RoboDepth Competition
-
Track 1 Self-Supervised Learning Track: Only monocular sequences are used for model training without the supervision of depth maps
-
Track 2 Fully-Supervised Learning Track: The participants can make full use of all depth maps released to train the model
举办平台
主办方

背景
Depth estimation from monocular and stereo images plays an essential role in real-world visual perception systems. Although promising results have been achieved, the current learning-based depth estimation models are trained and tested on clean datasets while ignoring the out-of-distribution (OoD) situations. Common corruptions, however, tend to happen in practical scenarios, which is safety-critical for applications like autonomous driving and robot navigation. To raise attention among the community to robust depth estimation, we propose the RoboDepth challenge.
单目和立体图像深度估计在现实世界的视觉感知系统中起着至关重要的作用。尽管已经取得了令人满意的结果,但目前基于学习的深度估计模型是在干净的数据集上进行训练和测试的,而忽略了分布不足(OoD)的情况。然而,常见的损坏往往发生在实际场景中,这对于自动驾驶和机器人导航等应用程序的安全至关重要。为了提高社区对鲁棒深度估计的关注,我们提出了RoboDepth挑战。
Our RoboDepth is the very first benchmark that targets probing the OoD robustness of depth estimation models under common corruptions. There are 18 corruption types in total, ranging from three perspectives:
1. Weather and lighting conditions, such as sunny, low-light, fog, frost, snow, contrast, etc.
2. Sensor failure and movement, such as potential blurs (defocus, glass, motion, zoom) caused by motion.
3. Data processing issues, such as noises (Gaussian, impulse, ISO) happen due to hardware malfunctions.
我们的RoboDepth是第一个针对探测深度估计模型在常见损坏下的OoD鲁棒性的基准测试。总共有18种类型,从三个角度:
-
天气和照明条件,如晴天、弱光、雾、霜、雪、对比度等。
-
传感器故障和移动,如潜在的模糊(离焦,玻璃,运动,缩放)引起的运动。
-
由于硬件故障,数据处理问题,如噪声(高斯,脉冲,ISO)发生。
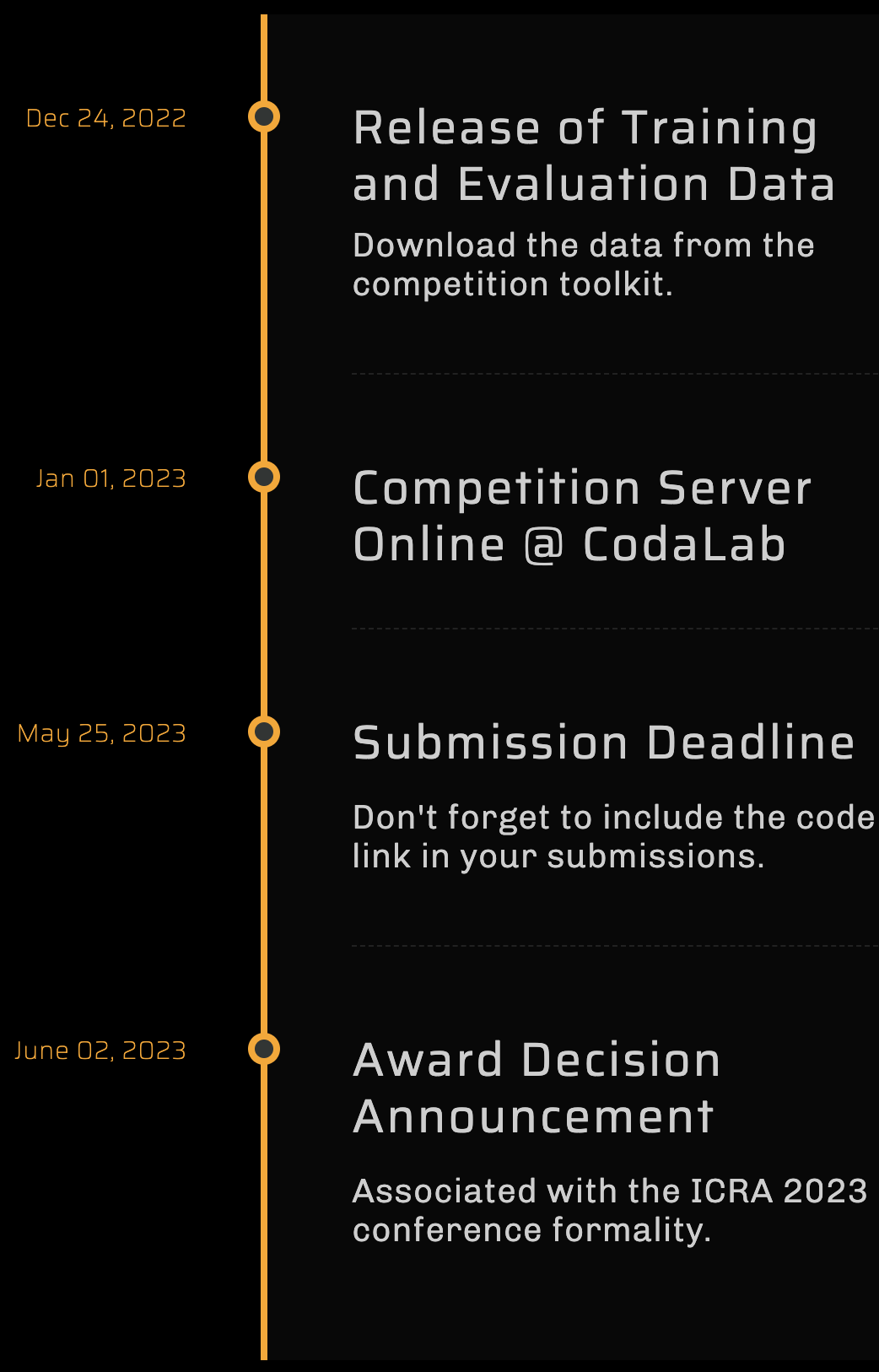
Part2时间安排
Part3奖励机制
