写在前面
1、本文内容
一款使用qt与open3d开发的点云配准软件,需要源码以及定制其他功能请私信。
2、平台
windows10与linux通用
3、软件下载
share_noel/PointCloud/registration_tool
https://blog.csdn.net/qq_41102371/article/details/125646840
使用
打开软件
cd registration_tool
# linux
./linux/registration_qt
# windows (windows可双击直接运行registration_qt.exe)
.\windows\registration_qt.exe
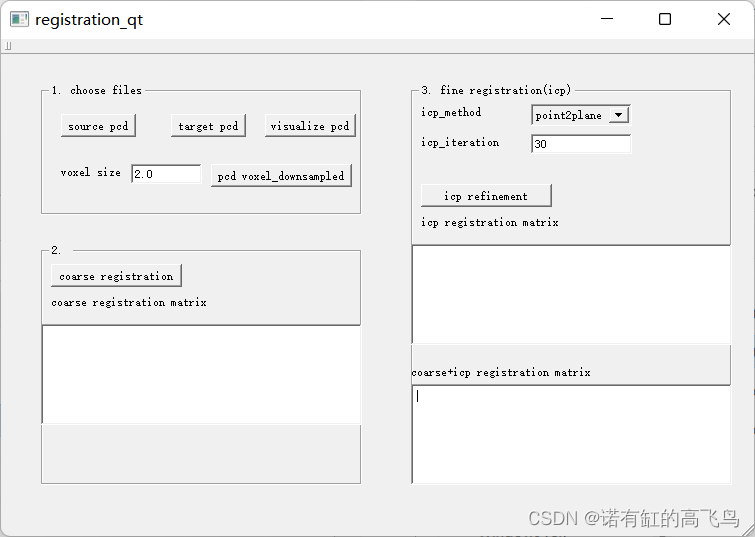
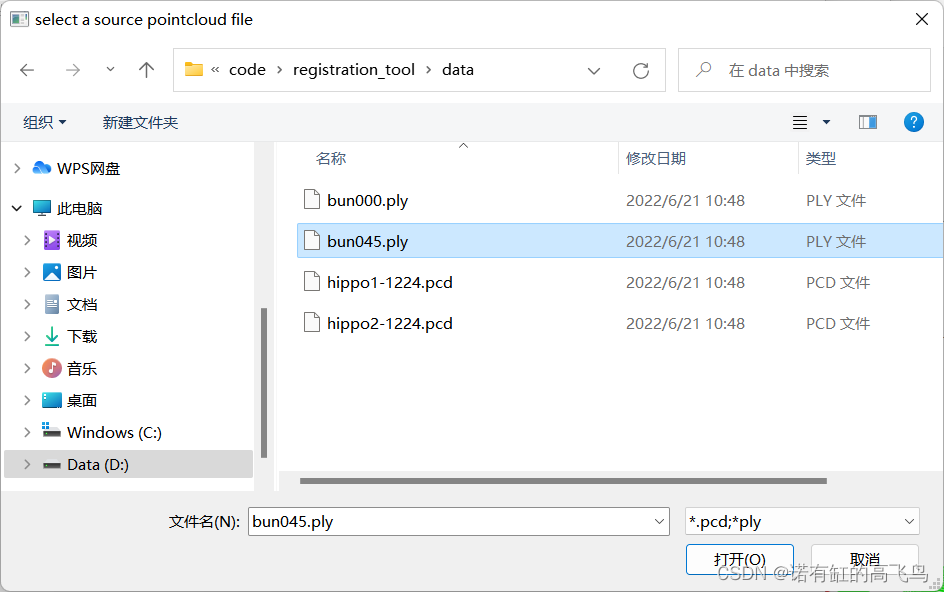
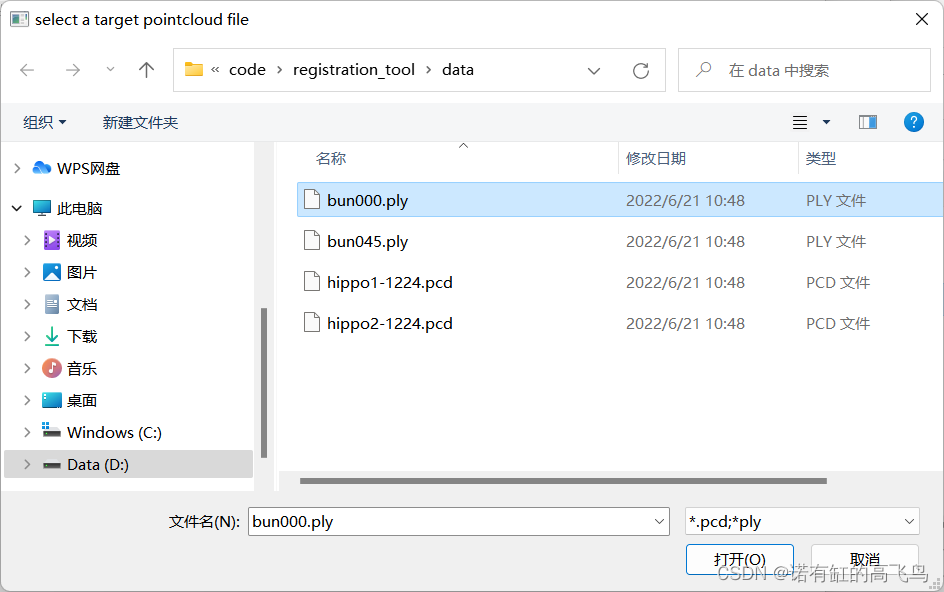
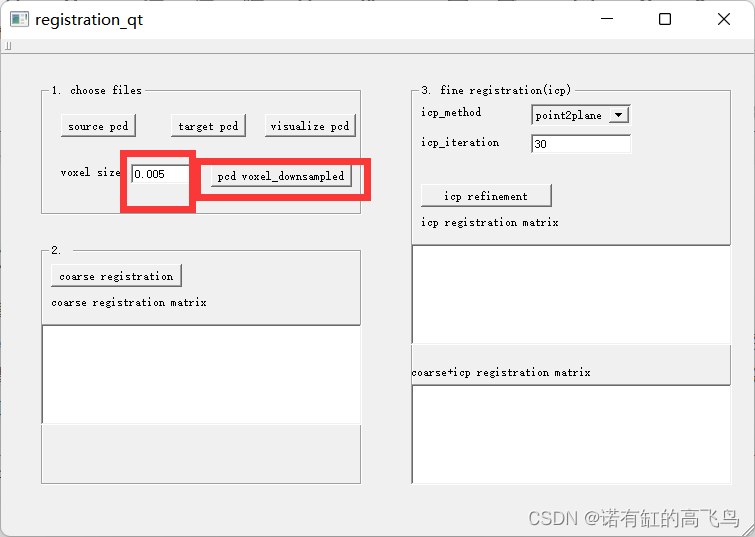
选择source点云,target点云
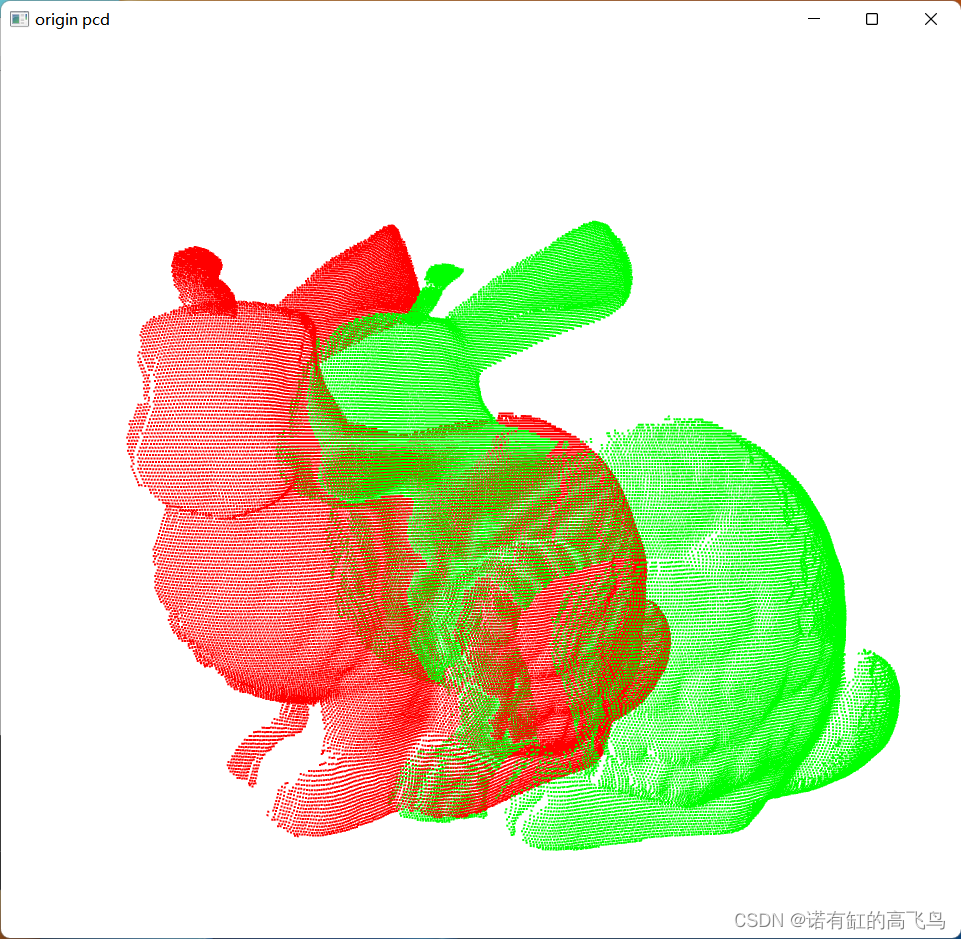
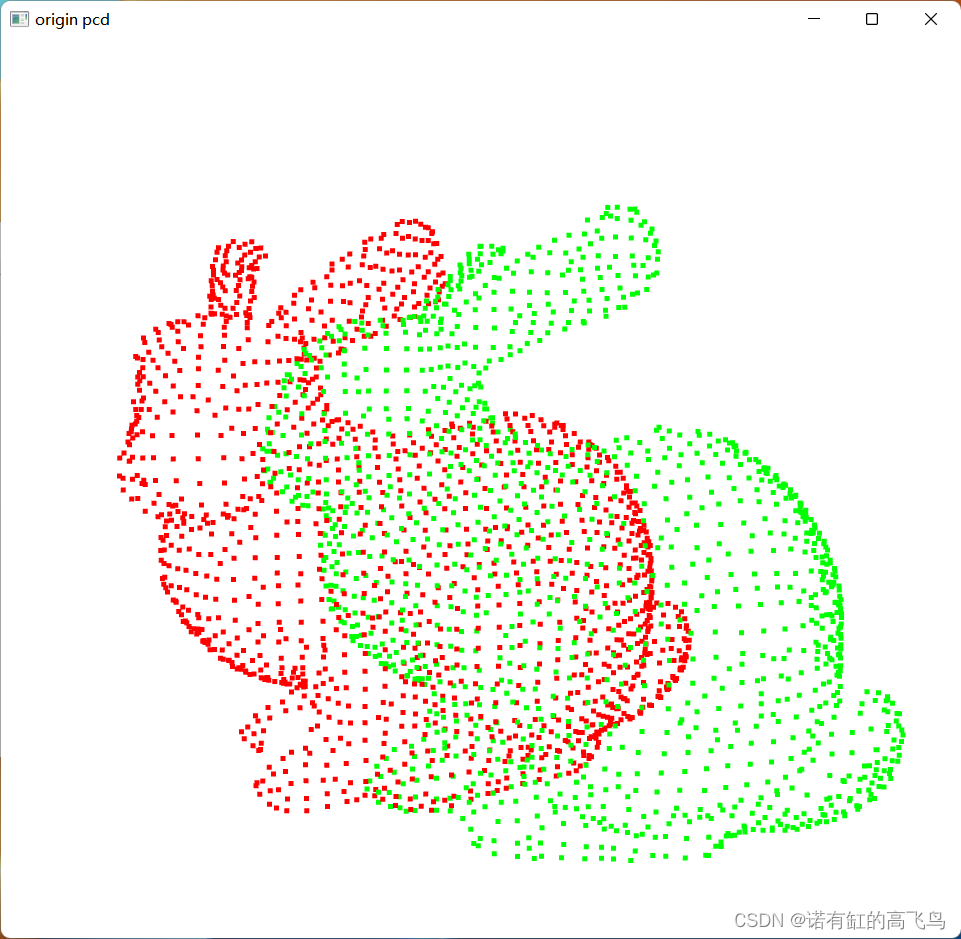
可视化当前点云状态,已将source点云颜色设置为绿色,target设置为红色
设置体素网格大小voxel_size
粗配准、精配准算法都会将点云进行降采样,降采样的体素网格大小都是voxel_size,因此voxel_size的设置会很大程度上影响结果,大小跟当前的点云有关,voxel_size太大会使点云信息基本丢失,太小会使降采样起不到减少点云数据量和使点均匀分布的效果,建议先使用pcd voxel_downsampled看看降采样后的点云情况,如对bunny点云设置的是0.005,同时起到了减少数据量和保持几何形状特征不丢失的作用
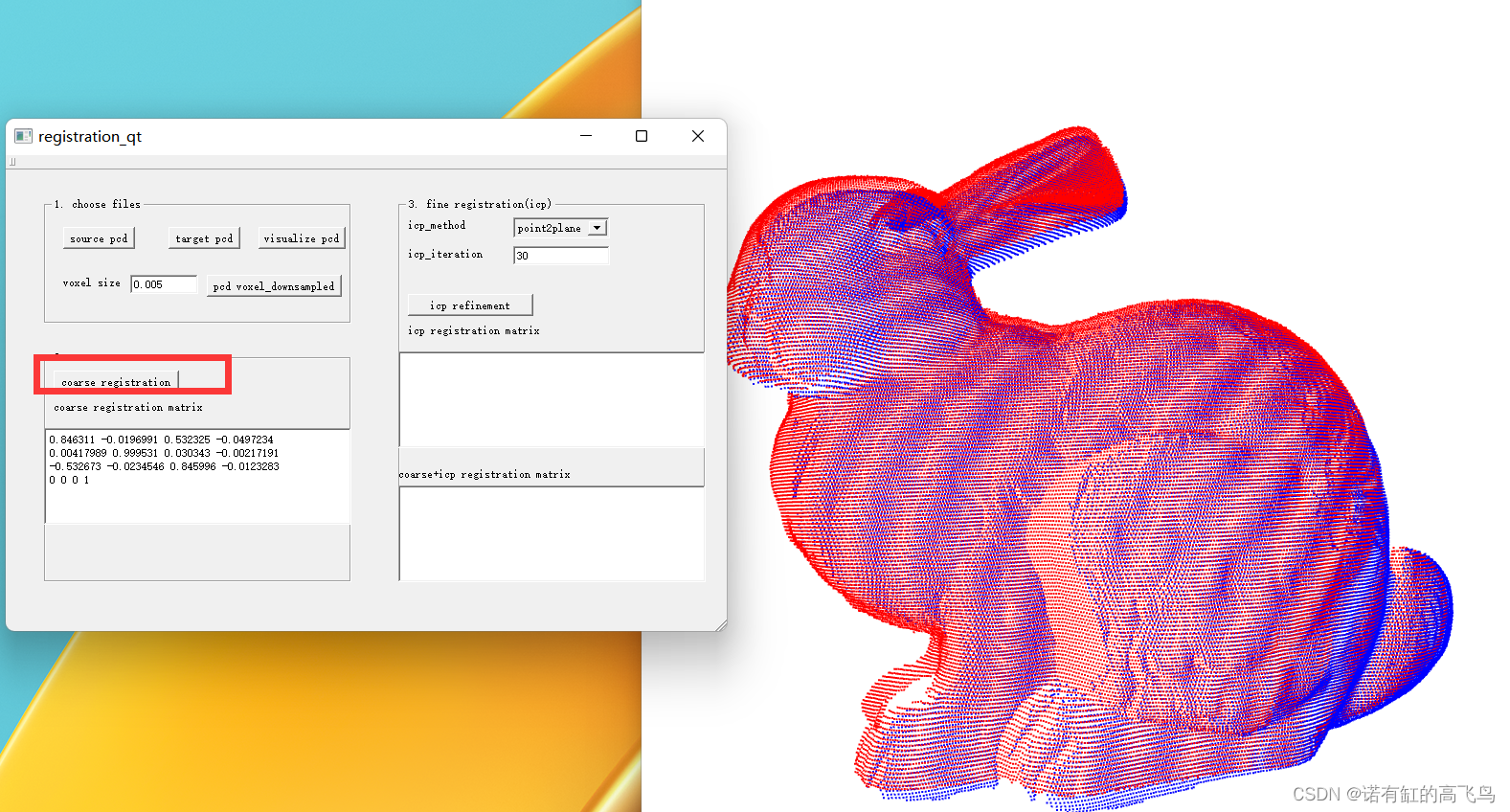
粗配准
精配准
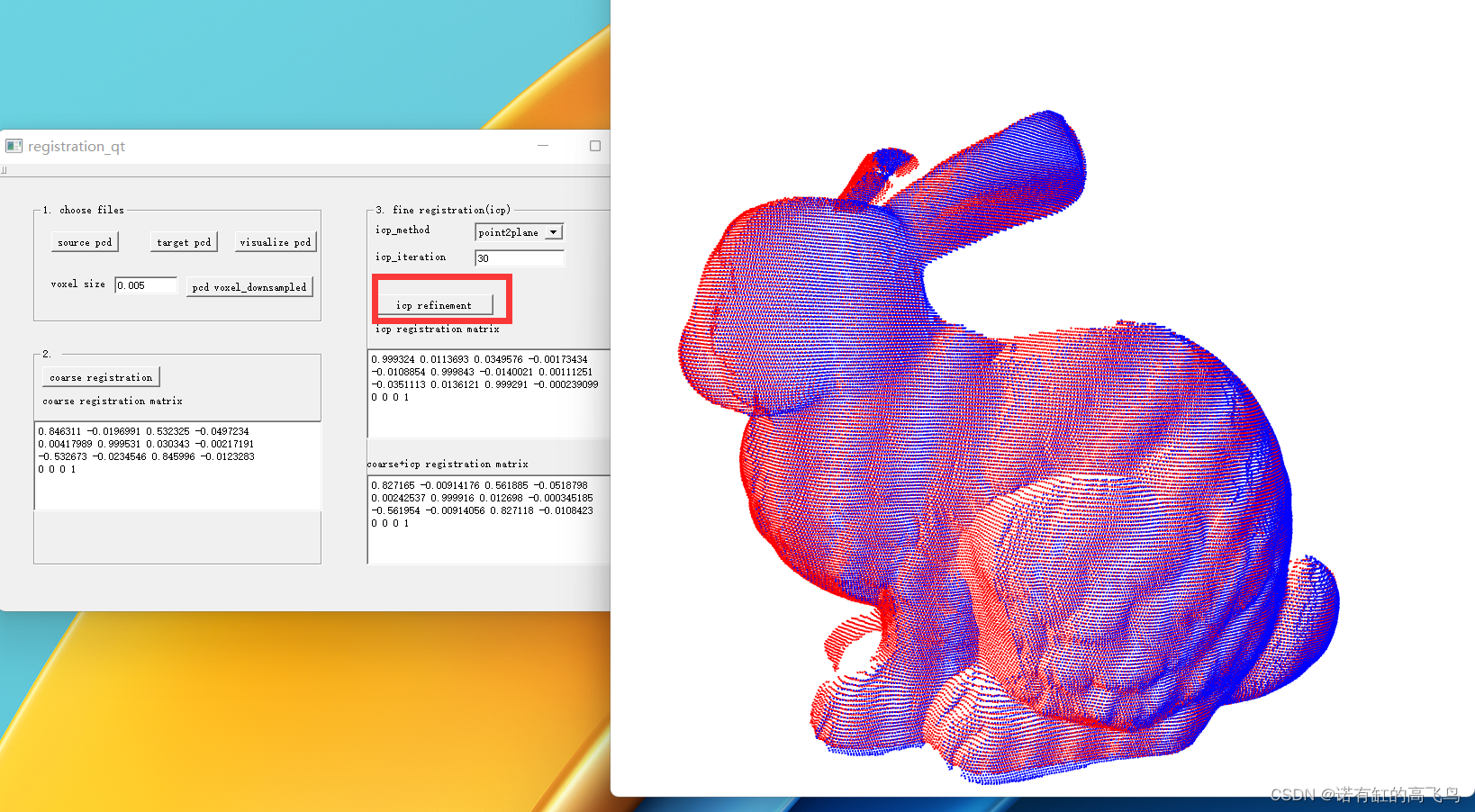
精配准之后点云已经贴合得比较好了
精配准说明:
1、如果前面使用了粗配准,那么精配准会在粗配准的基础之上进行,否则直接使用精配准算法直接配准
2、精配准算法有三个选择,point-to-point icp,point-to-plane icp,G-icp,默认point-to-plane icp
3、迭代次数默认30,是icp的迭代次数
参考
http://www.open3d.org/docs/release/