MATLAB求解一维非线性函数问题
前言
一维非线性函数是指函数的自变量和因变量都是一维实数,而且函数的形式是非线性的,也就是不符合线性函数的形式。在一维非线性函数中,自变量和因变量之间的关系通常是曲线状的,而不是直线状的。这种函数形式很常见,可以描述很多实际问题,如物理学、工程学、生物学等领域的各种现象和过程。常见的一维非线性函数包括二次函数、指数函数、对数函数、三角函数等。这些函数形式都不是线性的,其函数值与自变量之间的关系并不满足线性关系,因此需要使用不同的数学方法来求解最优解。
下面几个常见的一维非线性函数的例子:
幂函数: y = x 2 y=x^2 y=x2、 y = x 3 y=x^3 y=x3、 y = x 4 y=x^4 y=x4等;
指数函数: y = e x y=e^x y=ex、 y = 2 x y=2^x y=2x、 y = 1 0 x y=10^x y=10x等;
对数函数: y = ln ( x ) y=\ln(x) y=ln(x)、 y = log 2 ( x ) y=\log_2(x) y=log2(x)、 y = log 10 ( x ) y=\log_{10}(x) y=log10(x)等;
三角函数: y = sin ( x ) y=\sin(x) y=sin(x)、 y = cos ( x ) y=\cos(x) y=cos(x)、 y = tan ( x ) y=\tan(x) y=tan(x)等;
双曲函数: y = sin ( x ) y=\sin(x) y=sin(x)、 y = cos ( x ) y=\cos(x) y=cos(x)、 y = tan ( x ) y=\tan(x) y=tan(x)等;
逻辑斯蒂函数: y = 1 1 + e − x y = \frac{1}{1+e^{-x}} y=1+e−x1,常用于分类问题中的概率计算。
这些非线性函数的特点是函数图像不是一条直线,而是具有弯曲或曲线变化的形状,其导数也不是常数而是变化的。在优化问题中,非线性函数的优化往往比线性函数更加复杂和困难。
粒子群算法(Particle Swarm Optimization,PSO) 是一种启发式优化算法,它源于对鸟群捕食行为的研究。在粒子群算法中,被优化的问题被视为一个多维空间中的目标函数,算法通过模拟群体中每个粒子在空间中的搜索行为来寻找目标函数的全局最优解。
每个粒子在搜索空间中的位置表示一个潜在解,其速度表示了搜索方向和步长。每个粒子具有一个适应度值,该适应度值根据目标函数的表现来计算。粒子群算法通过协同粒子的行为来优化目标函数。粒子的速度和位置在每个迭代中被更新,使其朝着群体中的最佳位置和全局最佳位置移动。
粒子群算法的运行过程如下:
- 初始化粒子群,包括每个粒子的初始位置和速度,并设置全局最佳位置和全局最佳适应度值为初始值。
- 计算每个粒子的适应度值,更新全局最佳位置和全局最佳适应度值。
- 更新每个粒子的速度和位置,根据每个粒子当前位置与全局最佳位置之间的差异来调整速度和位置。
- 重复步骤
2和3,直到达到指定的停止准则,如达到最大迭代次数或满足收敛要求。
在实践中,粒子群算法经常与其他优化算法结合使用,例如遗传算法、模拟退火等。这些算法的组合可以提高搜索效率和准确性,从而提高优化问题的解决效率。
正文
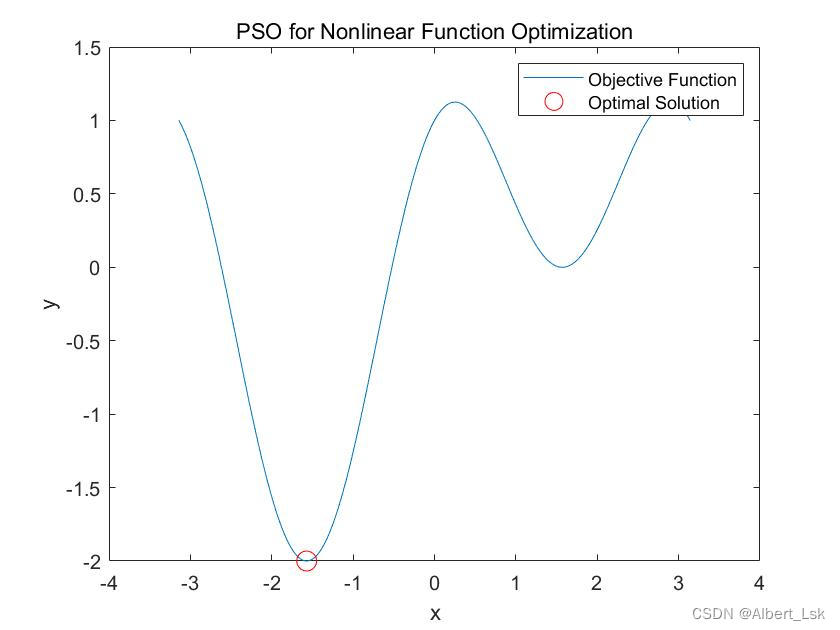
优化如下的三角函数: y = sin ( x ) + cos ( 2 x ) y=\sin(x)+\cos(2x) y=sin(x)+cos(2x)
其中, x x x 为变量,范围为 [ − π , π ] [-\pi, \pi] [−π,π]。
具体优化步骤如下:
- 初始化粒子群:随机生成一些粒子的位置和速度。
- 计算每个粒子的适应度:根据粒子的位置计算目标函数值。
- 更新全局最优解和个体最优解:记录历史最优解,并更新全局最优解和个体最优解。
- 更新粒子的速度和位置:根据全局最优解和个体最优解来更新粒子的速度和位置。
- 检查终止条件:检查是否满足终止条件,如果不满足则返回第3步。
在实际的实现中,我们需要选择合适的参数,如粒子数、迭代次数、惯性权重、加速度系数等,以及相应的初始值。此外,我们还需要考虑如何处理边界问题,如何控制算法的收敛速度等。
最后,通过绘制目标函数的图像来观察算法的优化效果,即目标函数值随着迭代次数的变化情况。
函数实现(可视化处理)
%%
clear
close all
warning off
clc
%% 调用粒子群算法求解
x_min = -pi;
x_max = pi;
n_pop = 50;
n_iter = 100;
w = 0.8;
c1 = 1.5;
c2 = 1.5;
[gbest, gbest_val] = pso(@objfun, x_min, x_max, n_pop, n_iter, w, c1, c2);
% 输出结果
fprintf('最优解:x = %f,最优值:%f\n', gbest, gbest_val);
% 可视化处理
x = linspace(-pi, pi, 1000);
y = sin(x) + cos(2*x);
plot(x, y);
hold on;
plot(gbest, gbest_val, 'ro', 'MarkerSize', 10);
title('PSO for Nonlinear Function Optimization');
xlabel('x');
ylabel('y');
legend('Objective Function', 'Optimal Solution');
hold off;
% 目标函数
function y = objfun(x)
y = sin(x) + cos(2*x);
end
% 粒子群算法
function [gbest, gbest_val] = pso(objfun, x_min, x_max, n_pop, n_iter, w, c1, c2)
% 参数设置
x_range = x_max - x_min;
v_min = -x_range;
v_max = x_range;
% 初始化粒子
pop = x_min + rand(n_pop, 1) * x_range;
v = v_min + rand(n_pop, 1) * (v_max - v_min);
pbest = pop;
pbest_val = objfun(pop);
[gbest_val, gbest_idx] = min(pbest_val);
gbest = pbest(gbest_idx);
% 迭代
for i = 1:n_iter
% 更新速度和位置
r1 = rand(n_pop, 1);
r2 = rand(n_pop, 1);
v = w*v + c1*r1.*(pbest-pop) + c2*r2.*(gbest-pop);
pop = pop + v;
% 边界处理
pop(pop < x_min) = x_min;
pop(pop > x_max) = x_max;
% 更新个体历史最优和全局历史最优
pbest_val_new = objfun(pop);
pbest_update_idx = pbest_val_new < pbest_val;
pbest(pbest_update_idx) = pop(pbest_update_idx);
pbest_val(pbest_update_idx) = pbest_val_new(pbest_update_idx);
[gbest_val_new, gbest_idx_new] = min(pbest_val);
if gbest_val_new < gbest_val
gbest = pbest(gbest_idx_new);
gbest_val = gbest_val_new;
end
end
end
可视化结果