驱动电机,我们在这里使用TB6612来驱动电机,同时,电机的内部我们有编码器进行计次
输出比较
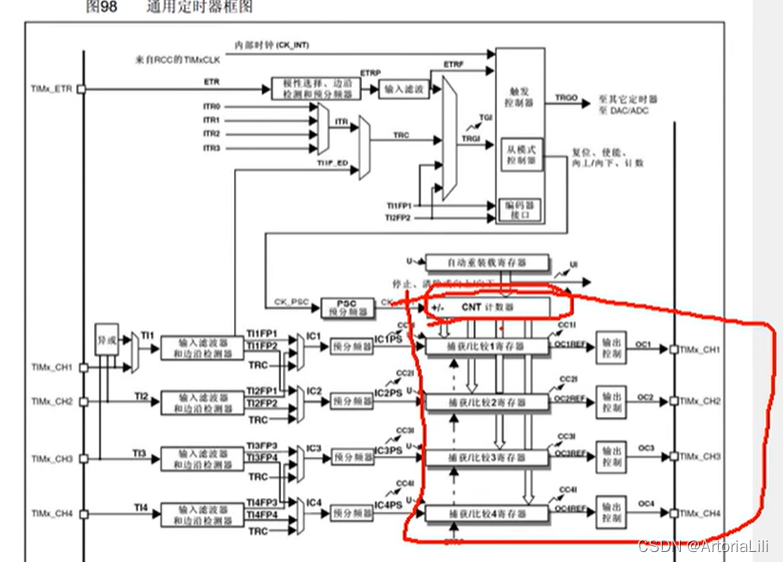
cnt,就是时基单元寄存器
ccr,在cnt下方,为捕获比较寄存器,cc是捕获比较的意思,r就是寄存器
他就可以在捕获与比较之间进行切换
cnt计数是自增的,CCR是我们给定的一个值,当cnt大于ccr 小于ccr 等于ccr时,CH1通道就会对应的置1 / 0 / 1 / 0,为我们需要用这个来输出PWM波形

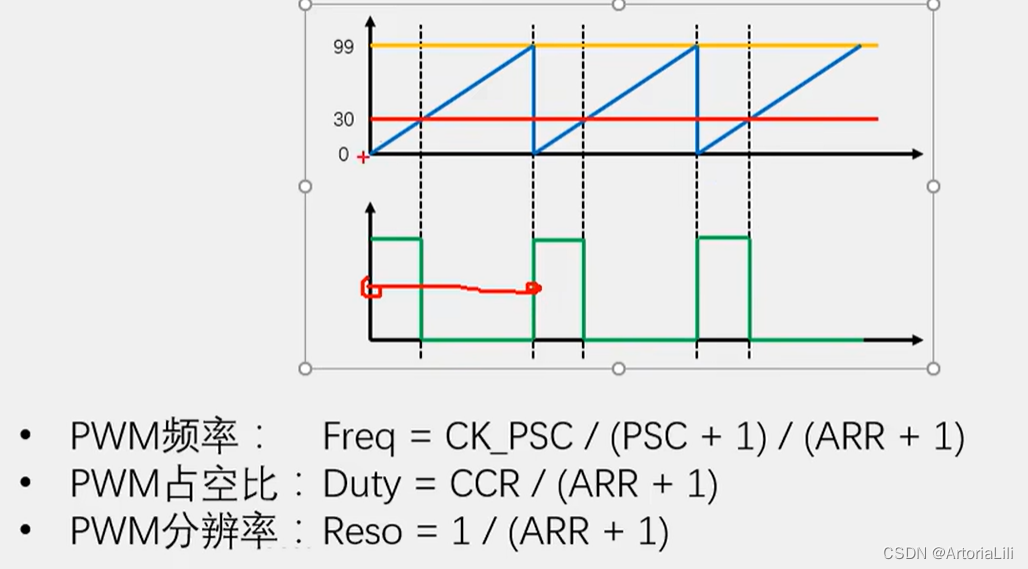
PWM参数: 频率 = 1 / ts 占空比 = ton / ts 分辨率 = 占空比变化
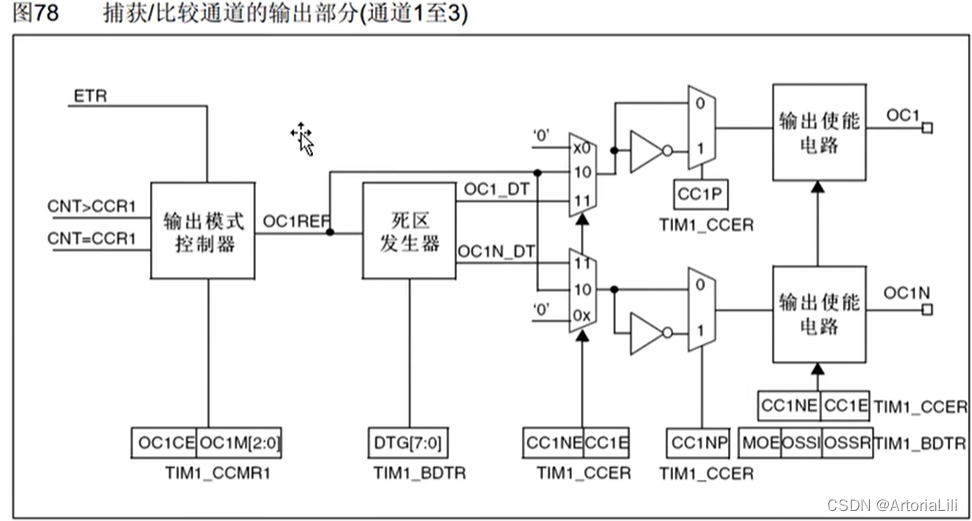
上图为输出控制OC输出PWM,相同的下面还有3个通道
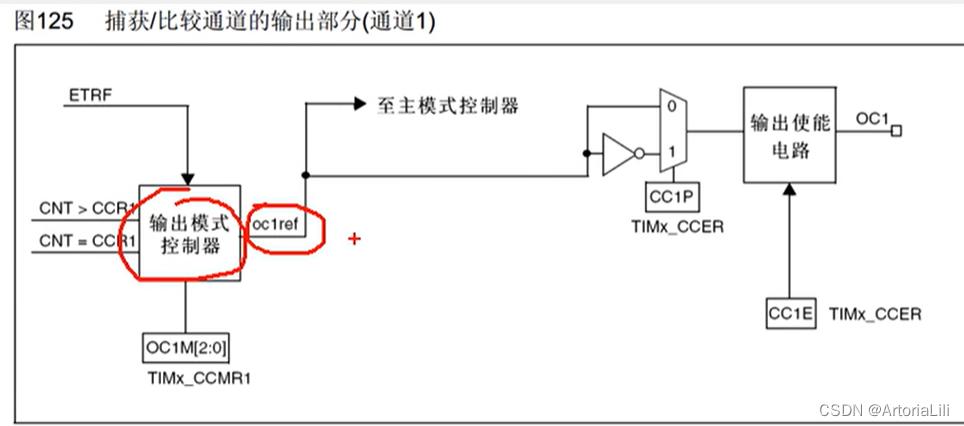
我们可以控制大小,控制输出的REF的高低电平
输出比较模式

PWM的结构我们之前说过,就不过多介绍,看一张图我们就能明白
直流电机
有两个电极,正接正转,反接反转,我们看看TB6612电路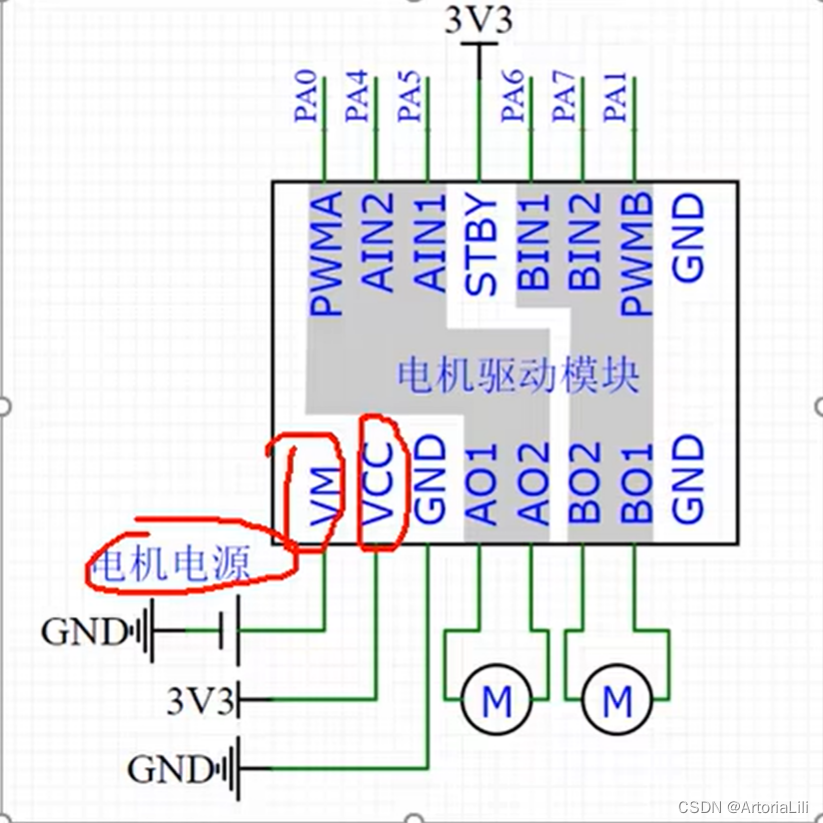

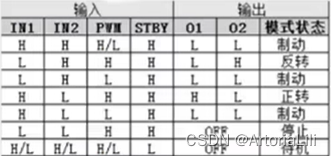
所以我们可以看出,想要驱动一个电机,我们需要配置3个IO口,一个PWM,两个AIN1/2
TB6612.h
#ifndef TB6612_H
#define TB6612_H
#include "sys.h"
/*B0 口*/
#define AIN1_GPIO_PIN GPIO_Pin_3
#define AIN1_GPIO_PORT GPIOB
#define AIN1_GPIO_CLK RCC_APB2Periph_GPIOB
/*输出高电平*/
#define AIN1_ON GPIO_SetBits(AIN1_GPIO_PORT,AIN1_GPIO_PIN)
/*输出低电平*/
#define AIN1_OFF GPIO_ResetBits(AIN1_GPIO_PORT,AIN1_GPIO_PIN)
/*B1口*/
#define AIN2_GPIO_PIN GPIO_Pin_4
#define AIN2_GPIO_PORT GPIOA
#define AIN2_GPIO_CLK RCC_APB2Periph_GPIOA
/*高电平*/
#define AIN2_ON GPIO_SetBits(AIN2_GPIO_PORT,AIN2_GPIO_PIN)
/*低电平*/
#define AIN2_OFF GPIO_ResetBits(AIN2_GPIO_PORT,AIN2_GPIO_PIN)
/*B10口*/
#define BIN1_GPIO_PIN GPIO_Pin_5
#define BIN1_GPIO_PORT GPIOA
#define BIN1_GPIO_CLK RCC_APB2Periph_GPIOA
#define BIN1_ON GPIO_SetBits(BIN1_GPIO_PORT,BIN1_GPIO_PIN)
#define BIN1_OFF GPIO_ResetBits(BIN1_GPIO_PORT,BIN1_GPIO_PIN)
/*B11口*/
#define BIN2_GPIO_PIN GPIO_Pin_12
#define BIN2_GPIO_PORT GPIOB
#define BIN2_GPIO_CLK RCC_APB2Periph_GPIOB
#define BIN2_ON GPIO_SetBits(BIN2_GPIO_PORT,BIN2_GPIO_PIN)
#define BIN2_OFF GPIO_ResetBits(BIN2_GPIO_PORT,BIN2_GPIO_PIN)
void AIN1_GPIO_Config(void);
void AIN2_GPIO_Config(void);
void PWMA_STOP(void);
void PWMA_Forward(int a);
void PWMA_Reverse(int a);
void BIN1_GPIO_Config(void);
void BIN2_GPIO_Config(void);
void PWMB_STOP(void);
void PWMB_Forward(int a);
void PWMB_Reverse(int a);
void TB6612_GPIO_Config(void);
void STOP(void);
void Forward(int a);
void Reverse(int a);
#endifTB6612.c
#include "TB6612.h"
#include "base_generaltim.h"
#include "stm32f10x.h"
// 开启AIN1,GPIO
void AIN1_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(AIN1_GPIO_CLK,ENABLE);
GPIO_InitStruct.GPIO_Pin = AIN1_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//使用推挽输出
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(AIN1_GPIO_PORT,&GPIO_InitStruct);
}
// 开启AIN2
void AIN2_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(AIN2_GPIO_CLK,ENABLE);
GPIO_InitStruct.GPIO_Pin = AIN2_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//ÍÆÍìÊä³ö
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(AIN2_GPIO_PORT,&GPIO_InitStruct);
}
void BIN1_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(BIN1_GPIO_CLK,ENABLE);
GPIO_InitStruct.GPIO_Pin = BIN1_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//ÍÆÍìÊä³ö
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(BIN1_GPIO_PORT,&GPIO_InitStruct);
}
void BIN2_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(BIN2_GPIO_CLK,ENABLE);
GPIO_InitStruct.GPIO_Pin = BIN2_GPIO_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//ÍÆÍìÊä³ö
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(BIN2_GPIO_PORT,&GPIO_InitStruct);
}
// 开启两个IO口,控制对应输出口
void TB6612_GPIO_Config(void)
{
AIN1_GPIO_Config();
AIN2_GPIO_Config();
BIN1_GPIO_Config();
BIN2_GPIO_Config();
}
void PWMA_STOP(void)//
{
AIN1_OFF;
AIN2_OFF;
GENERAL_ccr1_Mode_Config(0); //PWM输出
//PWM的初始化,在前两个函数,放在了主函数
}
void PWMA_Forward(int a)//01ΪÕýת
{
AIN1_OFF;
AIN2_ON;
GENERAL_ccr1_Mode_Config(a);
}
void PWMA_Reverse(int a)//10Ϊ·´×ª
{
AIN1_ON;
AIN2_OFF;
GENERAL_ccr1_Mode_Config(a);
}
void PWMB_STOP(void)//00Ϊֹͣ
{
BIN1_OFF;
BIN2_OFF;
GENERAL_ccr2_Mode_Config(0);
}
void PWMB_Forward(int a)//01ΪÕýת
{
BIN1_OFF;
BIN2_ON;
GENERAL_ccr2_Mode_Config(a);
}
void PWMB_Reverse(int a)//10Ϊ·´×ª
{
BIN1_ON;
BIN2_OFF;
GENERAL_ccr2_Mode_Config(a);
}
void STOP(void)
{
PWMA_STOP();
PWMB_STOP();
}
void Forward(int a)
{
PWMA_Forward(a);
PWMB_Forward(a);
}
void Reverse(int a)
{
PWMA_Reverse(a);
PWMB_Reverse(a);
}
我们也可以直接配置,然后在Compare里面来进行设定空比(调速)
同时也要进行对电机内编码器的计算
开启IC输出比较,进行cnt计算编码器计次,通过清零读数来计算编码器脉冲,计算编码器最主要的用途是用于PID的使用,我们下一节再说明