高等工程数学 —— 第五章 (2)非线性规划的最优条件
无约束规划问题的最优性条件
简单说就是先用一阶必要条件求驻点,再用二阶充分条件来验证。
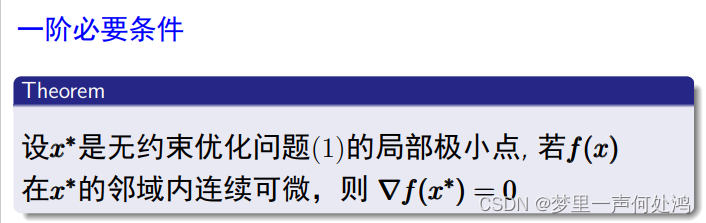
- 其实就是一阶导数为0然后解未知量的值
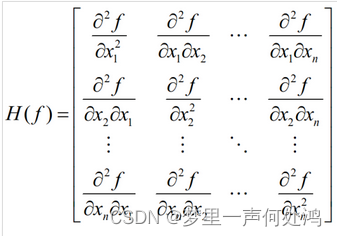
这里的Hesse矩阵如下:
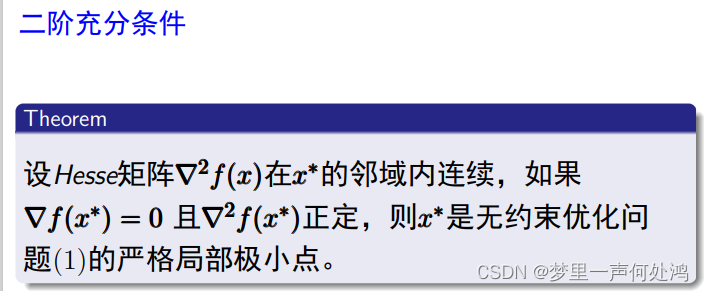
再简单说说判断矩阵是否正定的两种方法:
- 求出A的所有特征值。若A的特征值均为正数,则A是正定的;若A的特征值均为负数,则A为负定的。
- 计算A的各阶顺序主子式。若A的各阶顺序主子式均大于零,则A是正定的;若A的各阶主子式中,奇数阶主子式为负,偶数阶为正,则A为负定的。
例如:
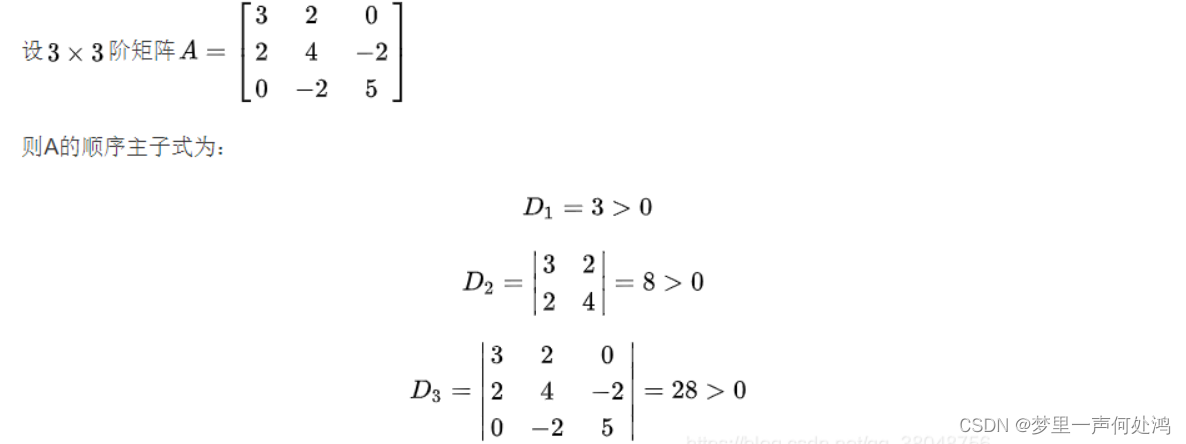
- 可知矩阵 A A A是正定矩阵
用一道例题就能很容易的理解:
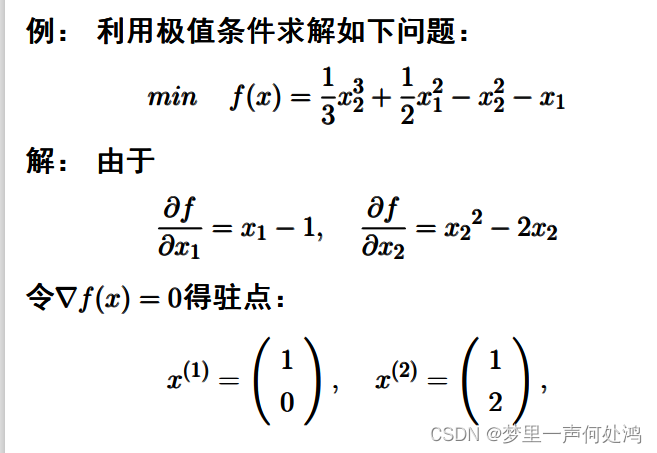
- 可见这里我们用一阶必要条件求出来了两个驻点
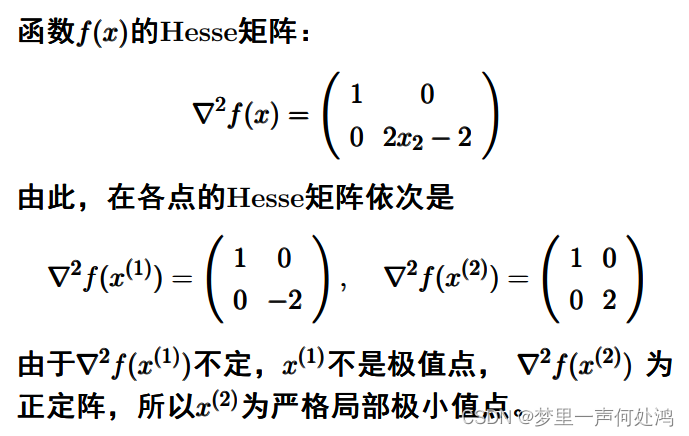
- 这里我们用二阶充分条件来判断出第一个驻点代入Hesse矩阵不正定,所以可知第二个驻点是严格局部极小值点
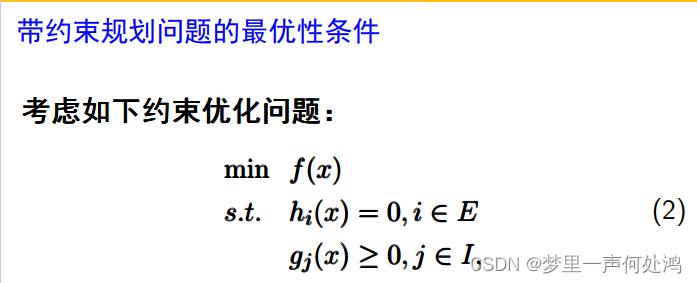
带约束规划问题的最优性条件
KKT
简单讲就是先用KKT必要条件求值,然后再用二阶充分条件来验证。
KKT必要条件
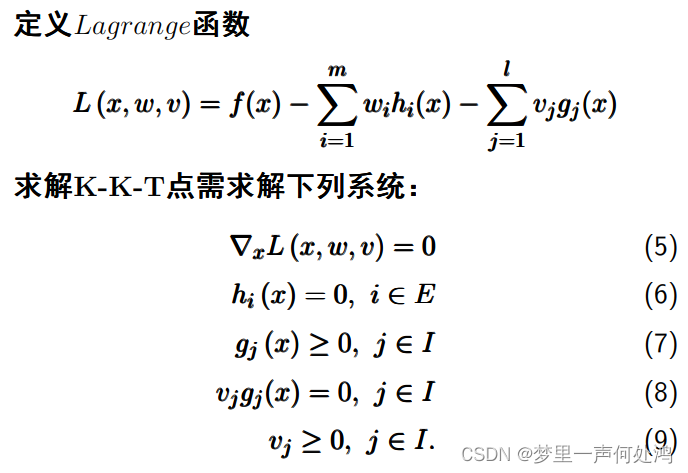
- 注意(5)式是对每一个 x x x来就梯度,即求一阶导数
二阶充分条件
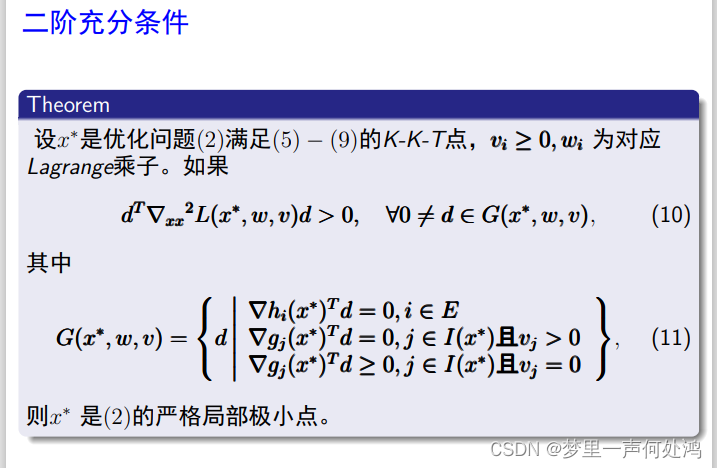
- 这里先求 d d d然后判断(10)式是否满足大于0
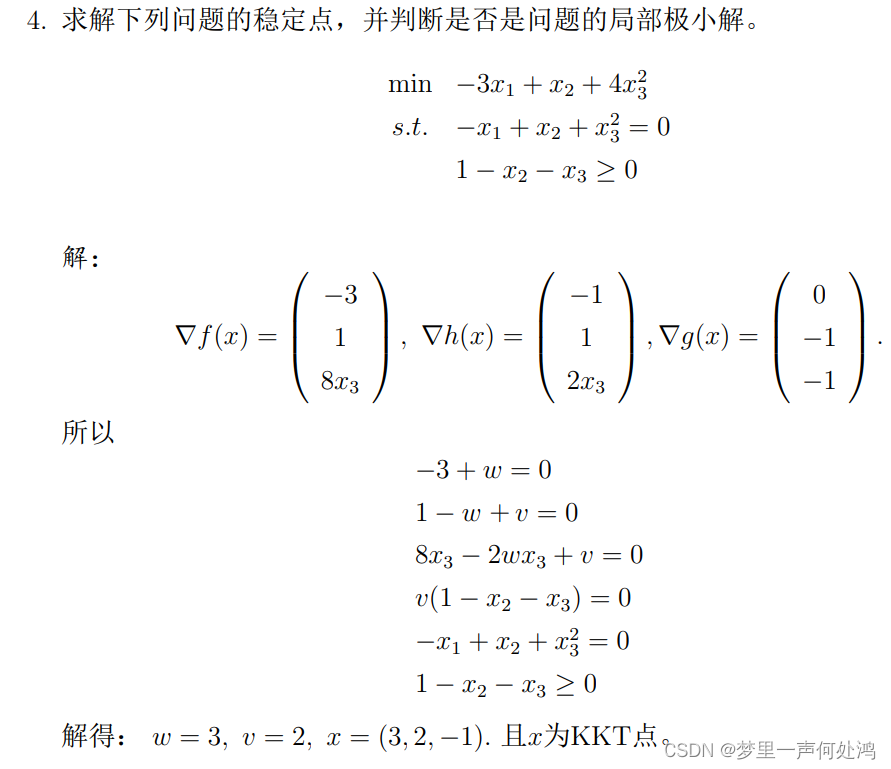
例1:
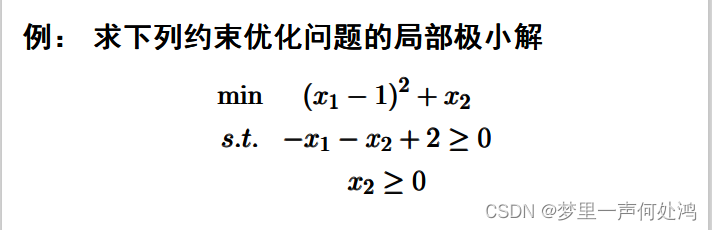
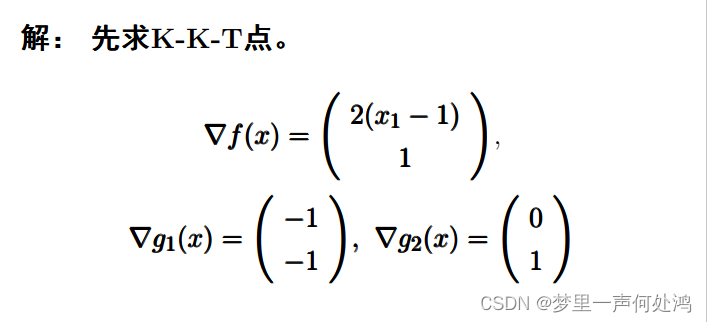
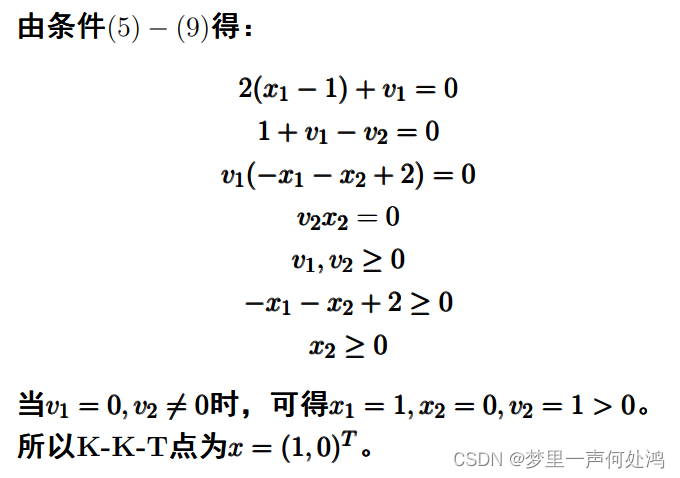
- 我们用KKT必要条件列出的式子来求出未知数的值,接下来用二阶充分条件来验证
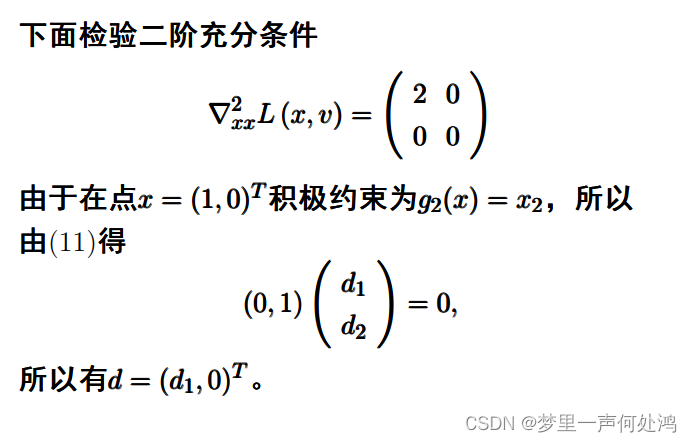
- 这里是用 v j > 0 v_j > 0 vj>0那个式子来求 d d d的
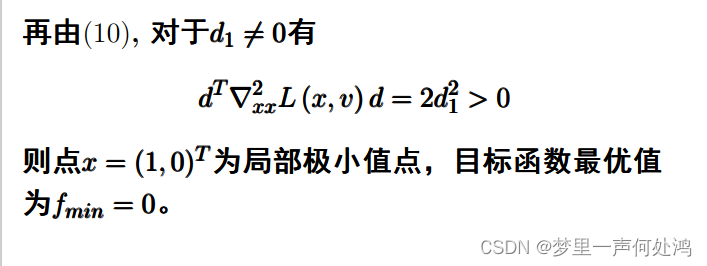
- 可见这里求得的值大于0,因此我们求得的点就是局部极小值点
例2: