SIFT关键点检测
SIFT,即尺度不变特征变换(Scale-invariant feature transform,SIFT),是用于图像处理领域的一种描述。这种描述具有尺度不变性,可在图像中检测出关键点,是一种局部特征描述子。
Harris角点具有旋转不变的特性.但是缩放后, 原来的角点有可能就不是角点了.
SIFT可以应用到物体辨识、机器人地图感知与导航、影像缝合、3D模型建立、手势辨识、影像追踪和动作比对等方向。
-
SIFT算法的特点:
- 稳定性
- 独特性
- 多量性
- 高速性
- 可扩展性
-
SIFT算法可以的解决问题:
- 目标的旋转、缩放、平移(RST)
- 图像放射/投影变换(视点viewpoint)
- 光照影响(illumination)
- 部分目标遮挡(occlusion)
- 杂物场景(clutter)
- 噪声
1. SIFT原理
1.1 图像尺度空间
- SIFT 第一步就是寻找尺度空间的极值
在一定的范围内,无论物体是大还是小,人眼都可以分辨出来,然而计算机要有相同的能力却很难,所以要让机器能够对物体在不同尺度下有一个统一的认知,就需要考虑图像在不同的尺度下都存在的特点。
尺度空间的获取通常使用高斯模糊来实现
不同σ的高斯函数决定了对图像的平滑程度,越大的σ值对应的图像越模糊。
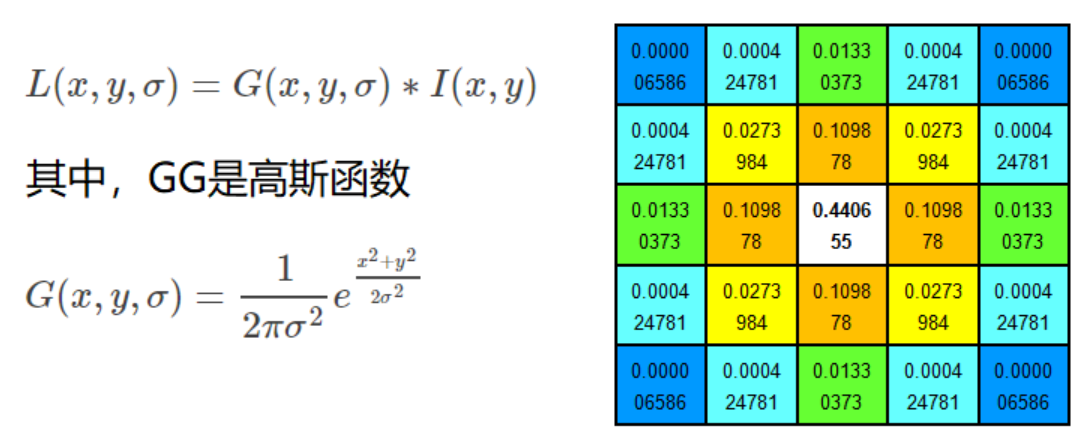
其中,*表示卷积计算。
其中,m、n表示高斯模版的维度,(x,y)代表图像像素的位置。 σ \sigma σ为尺度空间因子, σ \sigma σ值越小表示图像被平滑的越少,相应的尺度就越小。小尺度对应于图像的细节特征,大尺度对应于图像的概貌特征,效果如下图所示,尺度从左到右,从上到下,一次增大。

1.2多分辨率金字塔
- SIFT 第二步就是建立高斯金字塔
尺度空间在实现时,使用高斯金字塔表示,高斯金字塔的构建分为两部分:
1.对图像做不同尺度的高斯模糊
2.对图像做降采样(隔点采样)
图像的金字塔模型是指,将原始图像不断降阶采样,得到一系列大小不一的图像,由大到小,从下到上构成的塔状模型。原图像为金子塔的第一层,每次降采样所得到的新图像为金字塔的上一层(每层一张图像),每个金字塔共n层。金字塔的层数根据图像的原始大小和塔顶图像的大小共同决定。
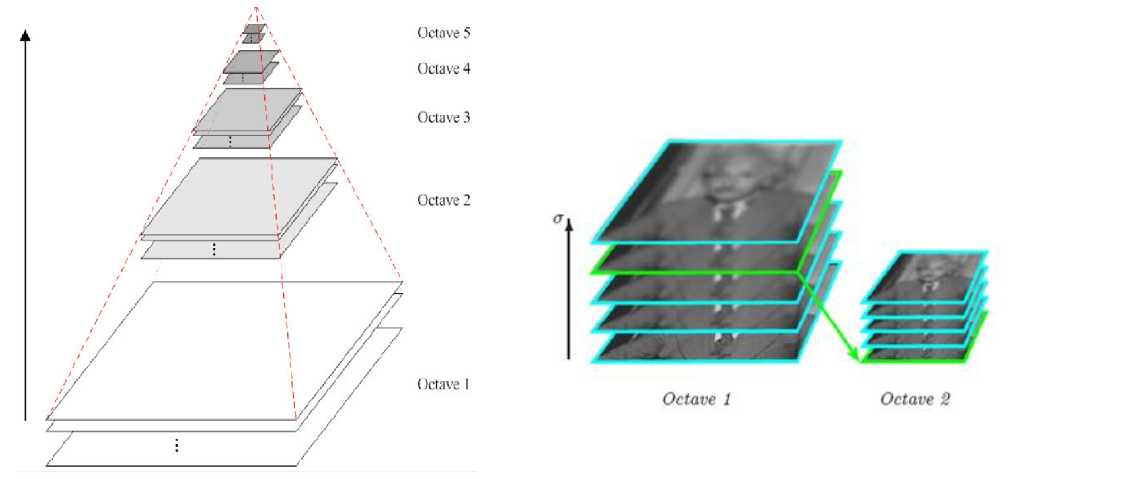
为了让尺度体现其连续性,高斯金字塔在简单降采样的基础上加上了高斯滤波。如上图所示,将图像金字塔每层的一张图像使用不同参数做高斯模糊,使得金字塔的每层含有多张高斯模糊图像,将金字塔每层多张图像合称为一组(Octave),金字塔每层只有一组图像,组数和金字塔层数相等,每组含有多层Interval图像。
高斯图像金字塔共o组、s层, 则有:
其中,σ表示尺度空间坐标,s表示sub-level层坐标, σ 0 \sigma_{0} σ0表示初始尺度,S表示每组层数(一般为3~5)
1.3 高斯差分金字塔(DOG)
SIFT 第三步就是建立DOG高斯差分金字塔
- DoG空间极值检测
为了寻找尺度空间的极值点,每个像素点要和其图像域(同一尺度空间)和尺度域(相邻的尺度空间)的所有相邻点进行比较,当其大于(或者小于)所有相邻点时,该点就是极值点。如下图所示,中间的检测点要和其所在图像的3×3邻域8个像素点,以及其相邻的上下两层的3×3领域18个像素点,共26个像素点进行比较。

DOG在计算上只需相邻高斯平滑后图像相减,因此简化了计算!
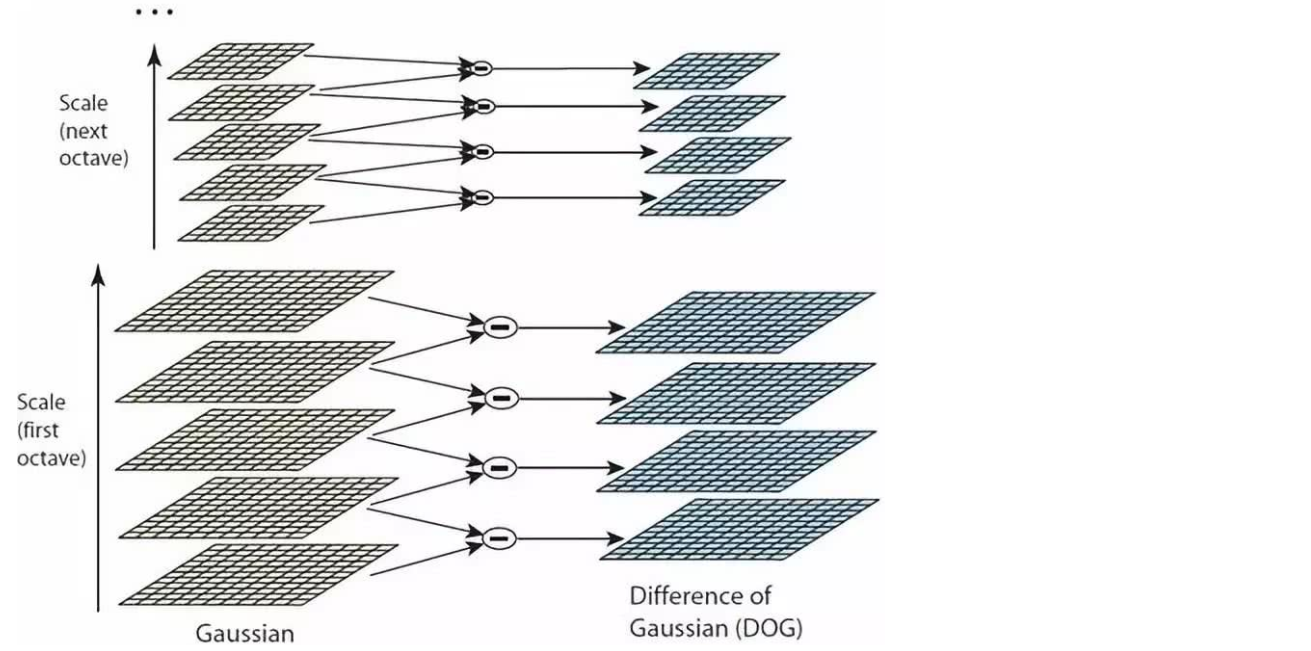
可以通过高斯差分图像看出图像上的像素值变化情况。(如果没有变化,也就没有特征。特征必须是变化尽可能多的点。)DOG图像描绘的是目标的轮廓
1.4 DOG局部极值检测
特征点是由DOG空间的局部极值点组成的。为了寻找DOG函数的极值点,每一个像素点要和它所有的相邻点比较,看其是否比它的图像域和尺度域 的相邻点大或者小。
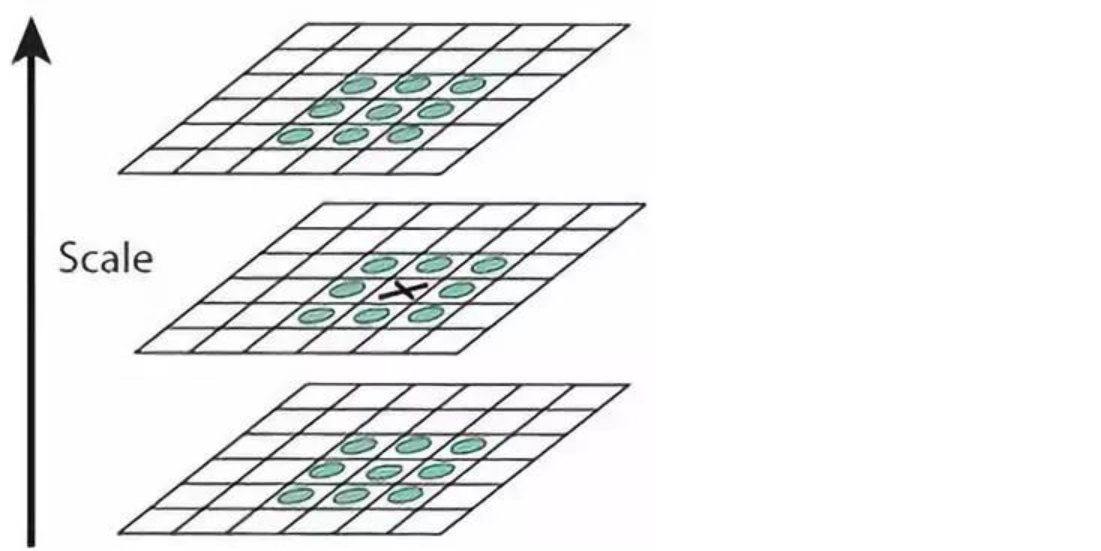
中间的检测点和它同尺度的8个相邻点和上下相邻尺度对应的9×2个 点共26个点比较,以确保在尺度空间和二维图像空间都检测到极值点。
1.5 关键点的精确定位
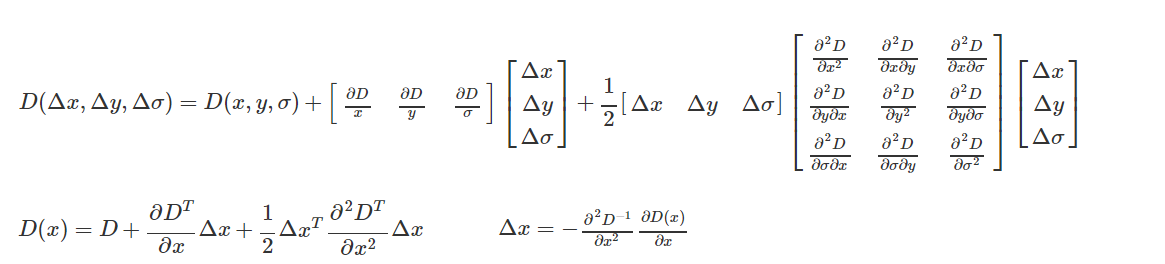
这些候选关键点是DOG空间的局部极值点,而且这些极值点均为离散的点,精确定位极值点的一种方法是,对尺度空间DoG函数进行曲线拟合,计算其极值点,从而实现关键点的精确定位。
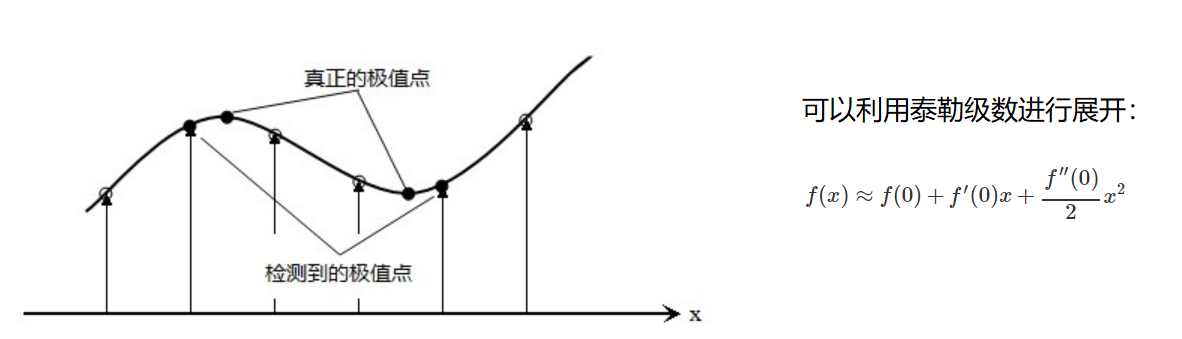 求导并让方程等于零,可以得到极值点的偏移量为:
求导并让方程等于零,可以得到极值点的偏移量为:
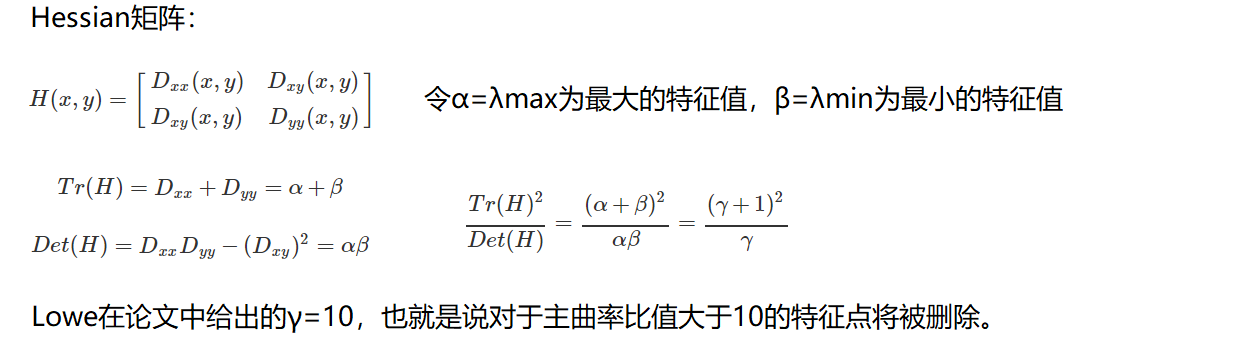
- 消除边界响应
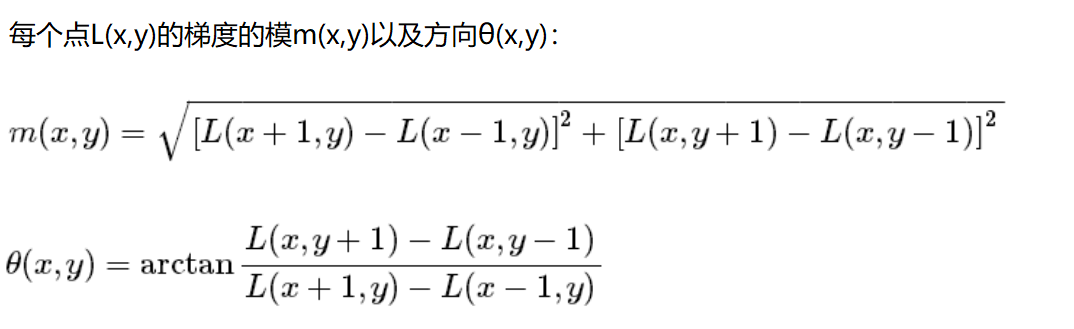
1.6特征点的主方向
每个特征点可以得到三个信息(x,y,σ,θ),即位置、尺度和方向。具有多个方向的关键点可以被复制成多份,然后将方向值分别赋给复制后的特征点,一个特征点就产生了多个坐标、尺度相等,但是方向不同的特征点。
1.7生成特征描述
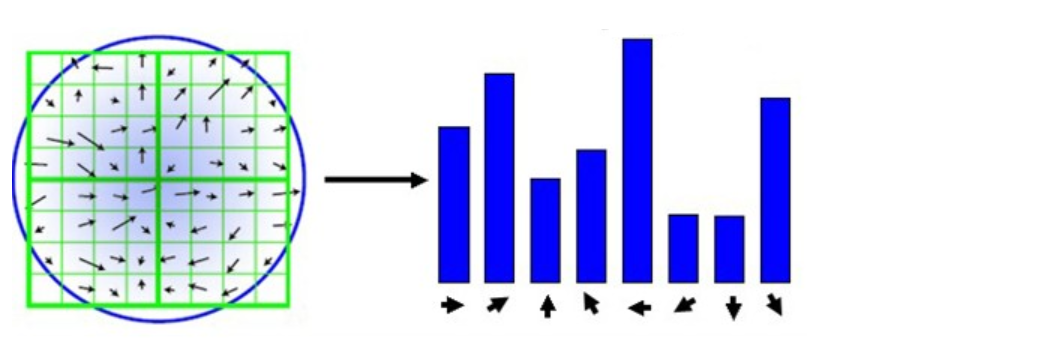
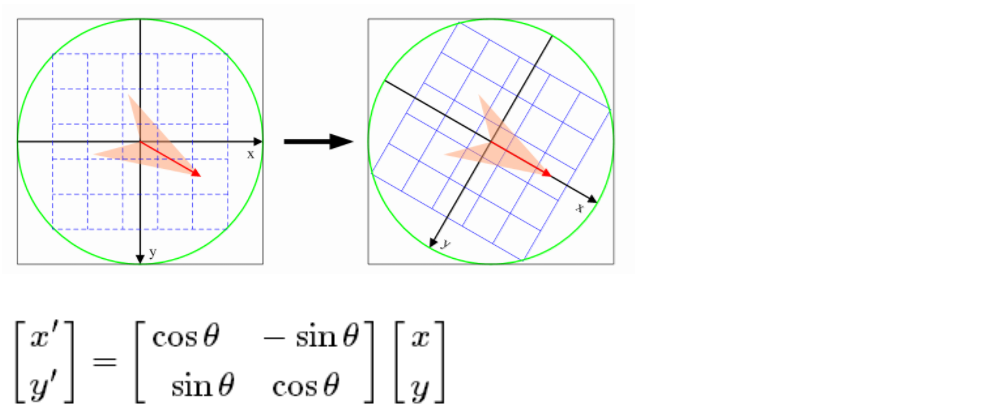
为了保证特征矢量的旋转不变性,要以特征点为中心,在附近邻域内将坐标轴旋转θ角度,即将坐标轴旋转为特征点的主方向。
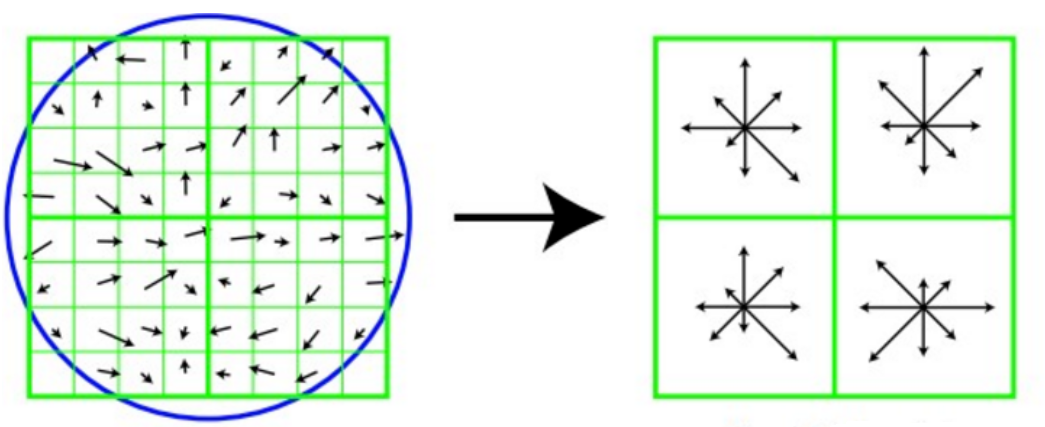
旋转之后的主方向为中心取8x8的窗口,求每个像素的梯度幅值和方向,箭头方向代表梯度方向,长度代表梯度幅值,然后利用高斯窗口对其进行加权运算,最后在每个4x4的小块上绘制8个方向的梯度直方图,计算每个梯度方向的累加值,即可形成一个种子点,即每个特征的由4个种子点组成,每个种子点有8个方向的向量信息。
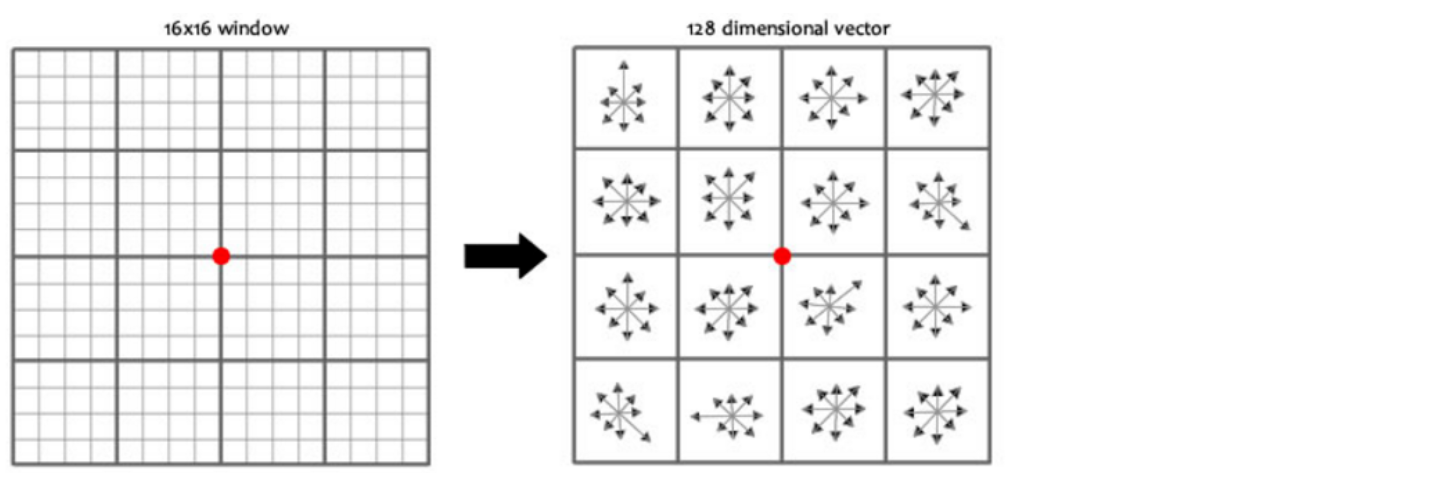
论文中建议对每个关键点使用4x4共16个种子点来描述,这样一个关键点就会产生128维的SIFT特征向量。
2.SIFI关键点检测基于OpenCV实现
- 创建SIFT对象 sift = cv2.xfeatures2d.SIFT_create()
- 进行检测, kp = sift. detect(img, …)
- 绘制关键点, drawKeypoints(gray, kp, img)
import cv2
import numpy as np
img = cv2.imread('chess.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 创建sift对象
# 注意: xfeatures2d是opencv的扩展包中的内容, 需要安装opencv-contrib-python
sift = cv2.xfeatures2d.SIFT_create()
# 进行检测
kp = sift.detect(gray)
# print(kp)
# 绘制关键点
cv2.drawKeypoints(gray, kp, img)
cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
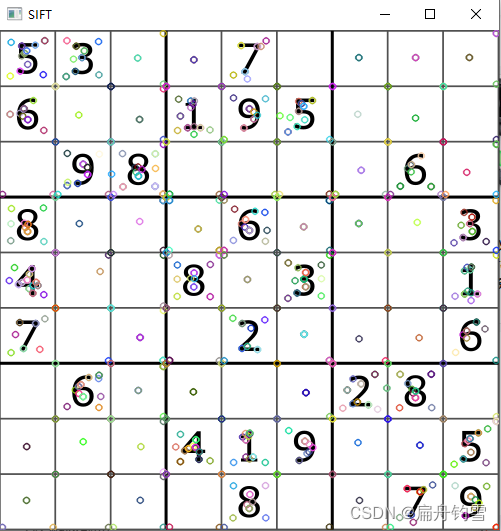
结果如图
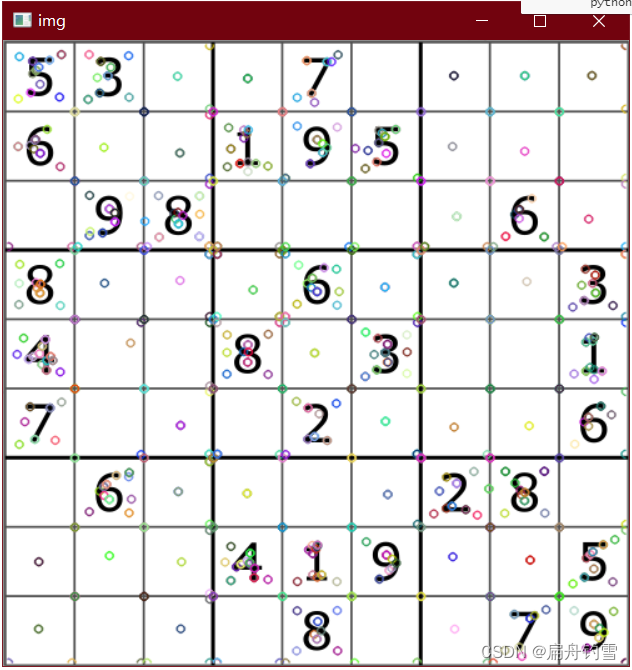
下图为harris 的结果
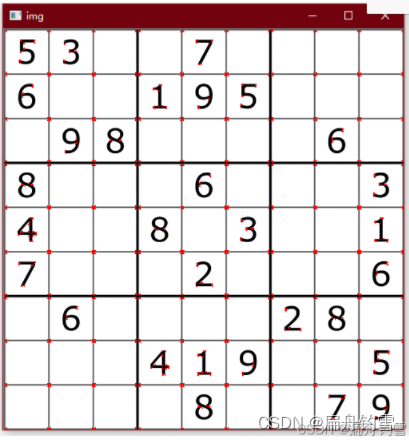
由上面两张图对比可知,SIFT算法匹配出的特征点更多,这是因为SIFT算法具有尺度和旋转不变性,即使两张图大小不一样、角度不一致也不会影响匹配结果,而Harris角点对尺度变化非常敏感,当遇到尺度变化较大时,很多正确特征点无法检测出来。
3.关键点和描述子
关键点: 位置, 大小和方向.
关键点描述子: 记录了关键点周围对其有共享的像素点的一组向量值, 其不受仿射变换, 光照变换等影响.描述子的作用就是进行特征匹配, 在后面进行特征匹配的时候会用上.
代码实现
import cv2
import numpy as np
img = cv2.imread('chess.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 创建sift对象
sift = cv2.xfeatures2d.SIFT_create()
# 进行检测
kp = sift.detect(gray)
# 检测关键点, 并计算描述子
kp, des = sift.compute(img, kp)
# 或者一步到位, 把关键点和描述子一起检测出来.
kp, des = sift.detectAndCompute(img, None)
# print(kp)
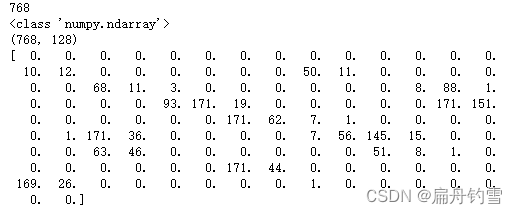
print(des)
print(des.shape)
执行结果
绘制关键点
cv2.drawKeypoints(gray, kp, img)
cv2.imshow(‘img’, img)
cv2.waitKey(0)
cv2.destroyAllWindows()
执行结果