全文耗时一周,精心汇总20000余字,希望对大家有所帮助,感觉可以的点赞,关注,不迷路,后续还有更多干货!
看文章前,答应我,静下心来,慢慢品!
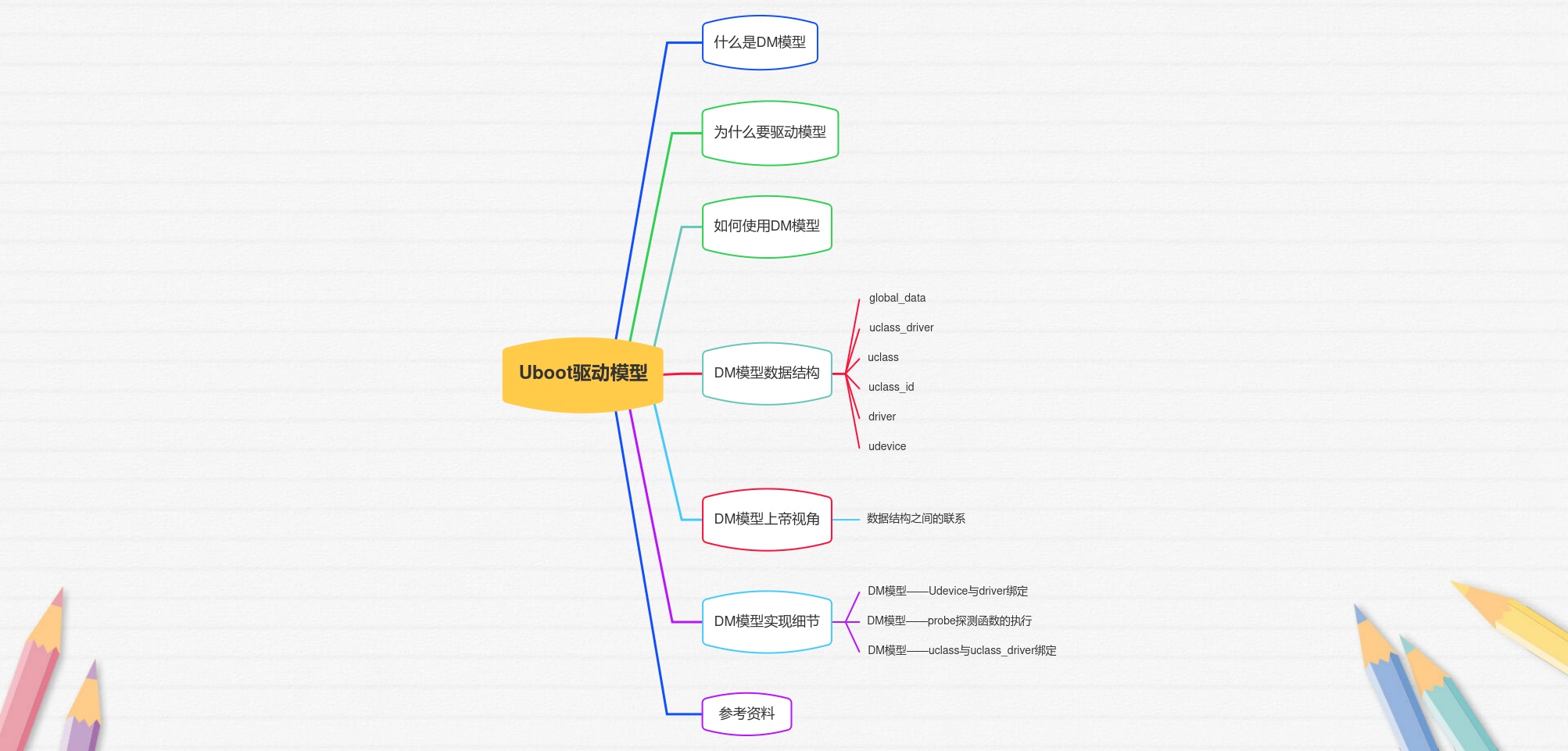
文章目录
3.1、什么是Uboot驱动模型
学过Linux的朋友基本都知道Linux的设备驱动模型,Uboot根据Linux的驱动模型架构,也引入了Uboot的驱动模型(driver model :DM)。
这种驱动模型为驱动的定义和访问接口提供了统一的方法。提高了驱动之间的兼容性以及访问的标准型,uboot驱动模型和kernel中的设备驱动模型类似。
3.2、为什么要有驱动模型呢
无论是Linux还是Uboot,一个新对象的产生必定有其要解决的问题,驱动模型也不例外!
- 提高代码的可重用性:为了能够使代码在不同硬件平台,不同体系架构下运行,必须要最大限度的提高代码的可重用性。
- 高内聚,低耦合:分层的思想也是为了达到这一目标,低耦合体现在对外提供统一的抽象访问接口,高内聚将相关度紧密的集中抽象实现。
- 便于管理:在不断发展过程中,硬件设备越来越多,驱动程序也越来越多,为了更好的管理驱动,也需要一套优秀的驱动架构!
3.3、如何使用uboot的DM模型
DM模型的使用,可以通过menuconfig来配置。
make menuconfig
①:menuconfig配置全局DM模型
Device Drivers -> Generic Driver Options -> Enable Driver Model
通过上面的路径来打开Driver Model模型,最终配置在.config文件中,CONFIG_DM=y
②:指定某个驱动的DM模型
全局的DM模型打开后,我们对于不通的驱动模块,使能或者失能DM功能。如MMC驱动为例:
Device Drivers -> MMC Host controller Support -> Enable MMC controllers using Driver Model
最终反映在.config文件中的CONFIG_DM_MMC=y
在对应的驱动中,可以看到判断#if !CONFIG_IS_ENABLED(DM_MMC),来判断是否打开DM驱动模型。
在管理驱动的Makefile文件中,也能看到obj-$(CONFIG_$(SPL_)DM_MMC) += mmc-uclass.o,来判断是否将驱动模型加入到编译选项中。
总之,我们要打开DM模型,最后反映在几个配置信息上:
CONFIG_DM=y,全局DM模型打开CONFIG_DM_XXX=y,某个驱动的DM模型的打开- 可以通过
Kconifg、Makefile来查看对应宏的编译情况

3.4、DM模型数据结构
要想了解DM模型整套驱动框架,我们必须先了解它的一砖一瓦!也就是组成驱动框架的各个数据结构。
① global_data
typedef struct global_data {
...
#ifdef CONFIG_DM
struct udevice *dm_root; /* Root instance for Driver Model */
struct udevice *dm_root_f; /* Pre-relocation root instance */
struct list_head uclass_root; /* Head of core tree */
#endif
...
}
global_data,管理着整个Uboot的全局变量,其中dm_root,dm_root_f,uclass_root用来管理整个DM模型。这几个变量代表什么意思呢?
dm_root:DM模型的根设备dm_root_f:重定向前的根设备uclass_root:uclass链表的头
这几个变量,最终要的作用就是:管理整个模型中的udevice设备信息和uclass驱动类。
② uclass
我们首先看一下uclass这个结构体
/**
* struct uclass - a U-Boot drive class, collecting together similar drivers
*
* A uclass provides an interface to a particular function, which is
* implemented by one or more drivers. Every driver belongs to a uclass even
* if it is the only driver in that uclass. An example uclass is GPIO, which
* provides the ability to change read inputs, set and clear outputs, etc.
* There may be drivers for on-chip SoC GPIO banks, I2C GPIO expanders and
* PMIC IO lines, all made available in a unified way through the uclass.
*
* @priv: Private data for this uclass
* @uc_drv: The driver for the uclass itself, not to be confused with a
* 'struct driver'
* @dev_head: List of devices in this uclass (devices are attached to their
* uclass when their bind method is called)
* @sibling_node: Next uclass in the linked list of uclasses
*/
struct uclass {
void *priv; //uclass的私有数据
struct uclass_driver *uc_drv; //uclass类的操作函数集合
struct list_head dev_head; //该uclass的所有设备
struct list_head sibling_node; //下一个uclass的节点
};
根据注释,我们就可以了解到,uclass相当于老师,管理着对应某一个类别下的所有的udevice。
例如:一个IIC驱动程序,其驱动程序框架是一致的,只有一种,但是IIC驱动的设备可以有很多,如EEPROM,MCU6050等;
所有在这里呢,
dev_head链表就是用来管理该驱动类下的所有的设备。
总结:uclass,来管理该类型下的所有设备,并且有对应的uclass_driver驱动。
- 定义
uclass是uboot自动生成的,并且不是所有uclass都会生成,有对应uclass_driver并且有被udevice匹配到的uclass才会生成。
- 存放
所有生成的uclass都会被挂载gd->uclass_root链表上。
- 相关API
直接遍历链表
gd->uclass_root链表并且根据uclass_id来获取到相应的uclass。
int uclass_get(enum uclass_id key, struct uclass **ucp);
// 从gd->uclass_root链表获取对应的ucla ss
③ uclass_driver
正如上面,我们看到了uclass类所包含uclass_driver结构体,uclass_driver正如其名,它就是uclass的驱动程序。其主要作用是:为uclass提供统一管理的接口,结构体如下:
/**
* struct uclass_driver - Driver for the uclass
*
* A uclass_driver provides a consistent interface to a set of related
* drivers.
*/
struct uclass_driver {
const char *name; // 该uclass_driver的命令
enum uclass_id id; // 对应的uclass id
/* 以下函数指针主要是调用时机的区别 */
int (*post_bind)(struct udevice *dev); // 在udevice被绑定到该uclass之后调用
int (*pre_unbind)(struct udevice *dev); // 在udevice被解绑出该uclass之前调用
int (*pre_probe)(struct udevice *dev); // 在该uclass的一个udevice进行probe之前调用
int (*post_probe)(struct udevice *dev); // 在该uclass的一个udevice进行probe之后调用
int (*pre_remove)(struct udevice *dev);// 在该uclass的一个udevice进行remove之前调用
int (*child_post_bind)(struct udevice *dev); // 在该uclass的一个udevice的一个子设备被绑定到该udevice之后调用
int (*child_pre_probe)(struct udevice *dev); // 在该uclass的一个udevice的一个子设备进行probe之前调用
int (*init)(struct uclass *class); // 安装该uclass的时候调用
int (*destroy)(struct uclass *class); // 销毁该uclass的时候调用
int priv_auto_alloc_size; // 需要为对应的uclass分配多少私有数据
int per_device_auto_alloc_size; //
int per_device_platdata_auto_alloc_size; //
int per_child_auto_alloc_size; //
int per_child_platdata_auto_alloc_size; //
const void *ops; //操作集合
uint32_t flags; // 标识为
};
- 定义
uclass_driver主要通过UCLASS_DRIVER来定义,这里就简单说明一下底层代码,耐心看哦!
下面以pinctrl为例
UCLASS_DRIVER(pinctrl) = {
.id = UCLASS_PINCTRL,
.post_bind = pinctrl_post_bind,
.flags = DM_UC_FLAG_SEQ_ALIAS,
.name = "pinctrl",
};
/* Declare a new uclass_driver */
#define UCLASS_DRIVER(__name) \
ll_entry_declare(struct uclass_driver, __name, uclass)
#define ll_entry_declare(_type, _name, _list) \
_type _u_boot_list_2_##_list##_2_##_name __aligned(4) \
__attribute__((unused, \
section(".u_boot_list_2_"#_list"_2_"#_name)))
上面基本上就是我们的底层代码了,稍微有点绕,但是也不难!我们只需要将宏进行替换就行了!
通过上面的定义,我们替换掉宏之后,最终得到的定义如下:
struct uclass_driver _u_boot_list_2_uclass_2_pinctrl = {
.id = UCLASS_PINCTRL,
.post_bind = pinctrl_post_bind,
.flags = DM_UC_FLAG_SEQ_ALIAS,
.name = "pinctrl",
}
//同时存放在段._u_boot_list_2_uclass_2_pinctrl中,也就是section段的内容
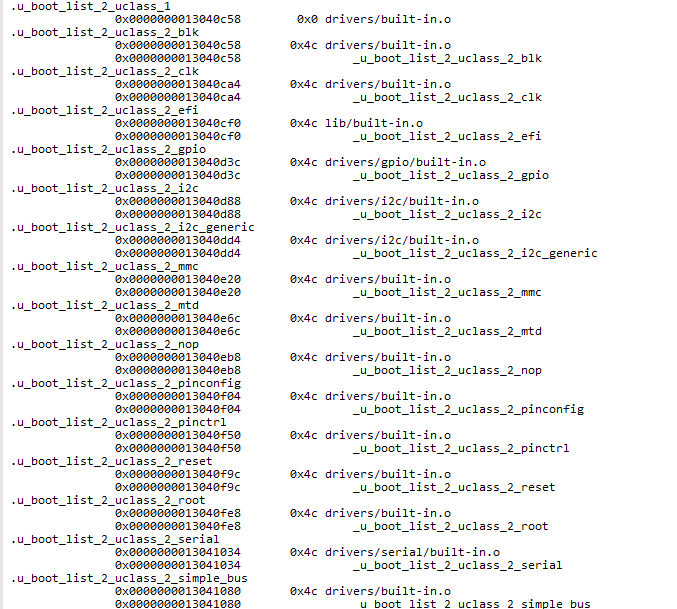
- 存放
由上面结构体可得,其定义之后都被存放在了段._u_boot_list_2_uclass_2_pinctrl中,那么去哪里可以看到呢?
在u-boot.map文件中搜索,._u_boot_list_2_uclass_2_pinctrl,就可以查到程序中定义的所有驱动程序。
这里相信大家会有疑问,为什么是uclass_2呢?我们大概看一下,也会看到uclass_1和uclass_3,这两个代表什么呢?往下看!
- 相关API
想要获取uclass_driver需要先获取uclass_driver table。
struct uclass_driver *uclass =
ll_entry_start(struct uclass_driver, uclass);
// 会根据.u_boot_list_2_uclass_1的段地址来得到uclass_driver table的地址
const int n_ents = ll_entry_count(struct uclass_driver, uclass);
// 获得uclass_driver table的长度
struct uclass_driver *lists_uclass_lookup(enum uclass_id id)
// 从uclass_driver table中获取uclass id为id的uclass_driver。
正如注释描述,上文中提到的uclass_1和uclass_3起到定位作用,用于计算uclass_2的长度!
上述的API,主要用于根据uclass_id来查找到对应的uclass_driver,进而操作对应的uclass下的udevice。
④ uclass_id
我们在uclass_driver中,看到一个uclass_id类型,这种类型与uclass有什么关系呢?
我们知道,uclass代表驱动的一个类别,uclass_driver是uclass的驱动程序,为uclass提供统一操作接口。而对于不同类型的驱动,就需要uclass_id来区分了!
事实上,每一种类型的设备``uclass都有唯一对应的uclass_id,贯穿设备模型,也是udevice与uclass`相关联的关键之处。
enum uclass_id {
/* These are used internally by driver model */
UCLASS_ROOT = 0,
UCLASS_DEMO,
UCLASS_TEST,
UCLASS_TEST_FDT,
UCLASS_TEST_BUS,
UCLASS_TEST_PROBE,
......
/* U-Boot uclasses start here - in alphabetical order */
UCLASS_ACPI_PMC, /* (x86) Power-management controller (PMC) */
UCLASS_ADC, /* Analog-to-digital converter */
UCLASS_AHCI, /* SATA disk controller */
UCLASS_AUDIO_CODEC, /* Audio codec with control and data path */
UCLASS_AXI, /* AXI bus */
UCLASS_BLK, /* Block device */
UCLASS_BOARD, /* Device information from hardware */
......
};
在这里,我们就把他当作一个设备识别的标志即可!
最后,压轴的两个结构体出来了,也是DM模型最终操作的对象。
⑤ udevice
/**
* struct udevice - An instance of a driver
*
* This holds information about a device, which is a driver bound to a
* particular port or peripheral (essentially a driver instance).
*
*/
struct udevice {
const struct driver *driver; //device 对应的driver
const char *name; //device 的名称
void *platdata;
void *parent_platdata;
void *uclass_platdata;
ofnode node; //设备树节点
ulong driver_data;
struct udevice *parent; //父设备
void *priv; // 私有数据的指针
struct uclass *uclass; //驱动所属的uclass
void *uclass_priv;
void *parent_priv;
struct list_head uclass_node;
struct list_head child_head;
struct list_head sibling_node;
uint32_t flags;
int req_seq;
int seq;
#ifdef CONFIG_DEVRES
struct list_head devres_head;
#endif
};
-
定义
- **硬编码:**代码中调用
U_BOOT_DEVICE宏来定义设备资源,实际为一个设备实例。 - **设备树:**将设备描述信息写在对应的DTS文件中,然后编译成DTB,最终由uboot解析设备树后动态生成的。
- 传参方式:通过命令行或者接口将设备资源信息传递进来,非常灵活。
- **硬编码:**代码中调用
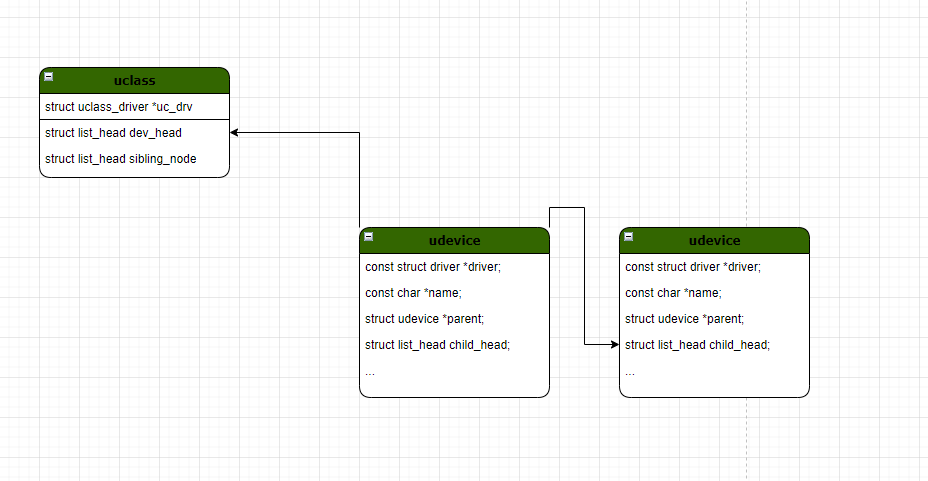
- 存放
udevice是最基础的一个设备单元,我们把它作为一个独立的个体,上层所有的操作,最终都与该结构体有关。
我们创建一个设备后,为了服从统一的管理,该结构体会被连接到DM模型下,并入到机制中。那么udevice会被连接到哪里呢?
- 将
udevice连接到对应的uclass中,uclass主要用来管理着同一类的驱动 - 除此之外,有父子关系的
udevice,还会连接到udevice->child_head链表下,方便调用
大概可以理解为下面这样:
- 相关API
#define uclass_foreach_dev(pos, uc) \
list_for_each_entry(pos, &uc->dev_head, uclass_node)
#define uclass_foreach_dev_safe(pos, next, uc) \
list_for_each_entry_safe(pos, next, &uc->dev_head, uclass_node)
int uclass_get_device(enum uclass_id id, int index, struct udevice **devp); // 通过索引从uclass中获取udevice
int uclass_get_device_by_name(enum uclass_id id, const char *name, // 通过设备名从uclass中获取udevice
struct udevice **devp);
int uclass_get_device_by_seq(enum uclass_id id, int seq, struct udevice **devp);
int uclass_get_device_by_of_offset(enum uclass_id id, int node,
struct udevice **devp);
int uclass_get_device_by_phandle(enum uclass_id id, struct udevice *parent,
const char *name, struct udevice **devp);
int uclass_first_device(enum uclass_id id, struct udevice **devp);
int uclass_first_device_err(enum uclass_id id, struct udevice **devp);
int uclass_next_device(struct udevice **devp);
int uclass_resolve_seq(struct udevice *dev);
这些相关的API,主要作用就是根据uclass_id,查找对应的uclass,然后根据索引值或者名称,来查找到对应的udevice
⑥ driver
struct driver {
char *name; //驱动名称
enum uclass_id id; //驱动所对应的uclass_id
const struct udevice_id *of_match; //匹配函数
int (*bind)(struct udevice *dev); //绑定函数
int (*probe)(struct udevice *dev); //注册函数
int (*remove)(struct udevice *dev);
int (*unbind)(struct udevice *dev);
int (*ofdata_to_platdata)(struct udevice *dev);
int (*child_post_bind)(struct udevice *dev);
int (*child_pre_probe)(struct udevice *dev);
int (*child_post_remove)(struct udevice *dev);
int priv_auto_alloc_size;
int platdata_auto_alloc_size;
int per_child_auto_alloc_size;
int per_child_platdata_auto_alloc_size;
const void *ops; /* driver-specific operations */
uint32_t flags;
#if CONFIG_IS_ENABLED(ACPIGEN)
struct acpi_ops *acpi_ops;
#endif
};
- 定义
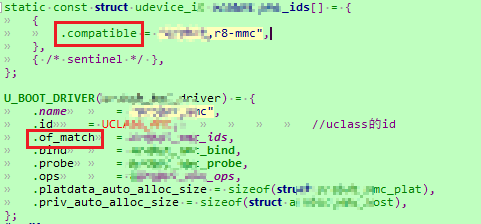
driver对象,主要通过U_BOOT_DRIVER来定义
以pinctrl来举例
U_BOOT_DRIVER(xxx_pinctrl) = {
.name = "xxx_pinctrl",
.id = UCLASS_PINCTRL,
.of_match = xxx_pinctrl_match,
.priv_auto_alloc_size = sizeof(struct xxx_pinctrl),
.ops = &xxx_pinctrl_ops,
.probe = xxx_v2s_pinctrl_probe,
.remove = xxx_v2s_pinctrl_remove,
};
/* Declare a new U-Boot driver */
#define U_BOOT_DRIVER(__name) \
ll_entry_declare(struct driver, __name, driver)
#define ll_entry_declare(_type, _name, _list) \
_type _u_boot_list_2_##_list##_2_##_name __aligned(4) \
__attribute__((unused, \
section(".u_boot_list_2_"#_list"_2_"#_name)))
通过上面的定义,最终我们定义的结构体如下:
struct driver _u_boot_list_2_driver_2_xxx_pinctrl = {
.name = "xxx_pinctrl",
.id = UCLASS_PINCTRL,
.of_match = xxxx_pinctrl_match,
.priv_auto_alloc_size = sizeof(struct xxx_pinctrl),
.ops = &xxxx_pinctrl_ops,
.probe = xxxx_pinctrl_probe,
.remove = xxxx_pinctrl_remove,
}
//同时存放在段._u_boot_list_2_driver_2_xxx_pinctrl中
- 存放
由上面结构体可得,其定义之后都被存放在了段._u_boot_list_2_driver_2_xxx中,那么去哪里可以看到呢?
在u-boot.map文件中搜索,._u_boot_list_2_driver,就可以查到程序中定义的所有驱动程序。
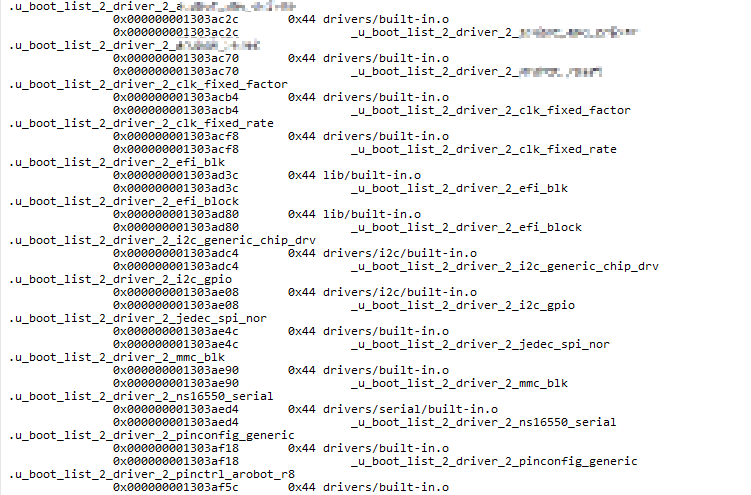
最终,所有driver结构体以列表的形式被放在.u_boot_list_2_driver_1和.u_boot_list_2_driver_3的区间中。
- 相关API
/*先获取driver table 表*/
struct driver *drv =
ll_entry_start(struct driver, driver); // 会根据.u_boot_list_2_driver_1的段地址来得到uclass_driver table的地址
const int n_ents = ll_entry_count(struct driver, driver); // 通过.u_boot_list_2_driver_3的段地址 减去 .u_boot_list_2_driver_1的段地址 获得driver table的长度
/*遍历所有的driver*/
struct driver *lists_driver_lookup_name(const char *name) // 从driver table中获取名字为name的driver。
正如注释描述,上文中提到的driver_1和driver_3起到定位作用,用于计算driver_2的长度!
上述的API,主要用于根据name来查找到对应的driver驱动程序。
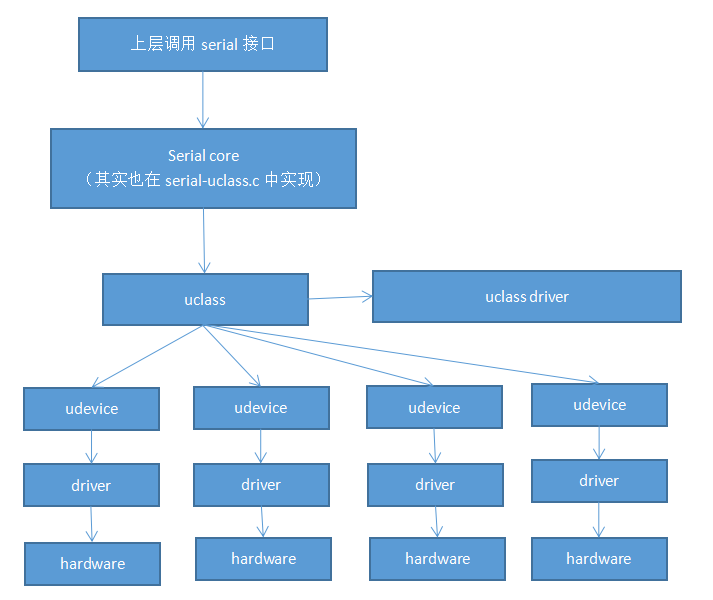
综上,DM模型相关的数据结构介绍完毕,整体设计的架构如下:
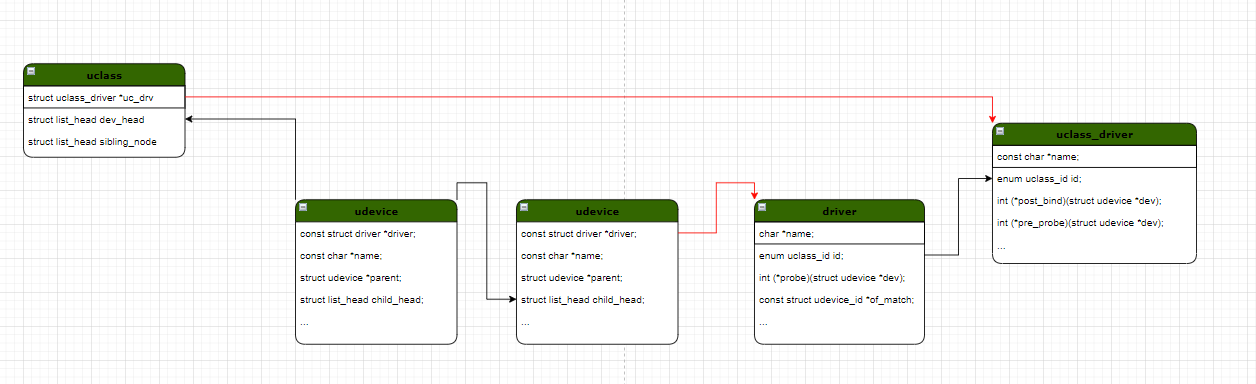
正如红线部分,如何实现driver和udevice的绑定、uclass、uclass_driver的绑定呢?
要想真正搞懂这些,我们不得不去深入到DM的初始化流程。
3.5、DM驱动模型之上帝视角
对于DM模型,我们站在上帝视角来观察整套模型框架是如何的!
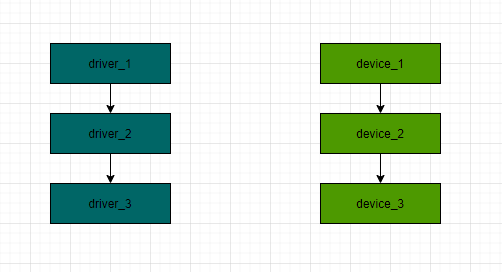
从对象设计的角度来看,Uboot的驱动模型可以分为静态形式和动态形式。
-
静态模式:对象是离散的,和其他对象分隔开,减小对象复杂度,利于模块化设计。
-
动态模式:运行态表达形式的对象是把所有的静态对象组合成层次视图,有清晰的数据关联视图
在静态模式下,驱动模型主要将对象分为udevice和driver,即设备和驱动程序,两个就像火车的两条轨道,永远也不会产生交集,驱动和设备可以想注册多少就注册多少。
我们看一下udevice的描述:
/**
* struct udevice - An instance of a driver
*
* This holds information about a device, which is a driver bound to a
* particular port or peripheral (essentially a driver instance).
*
*/
udevice是driver的一个实例,两个不相交的铁轨,终归也是想要发生爱情的。那么如何让其产生交集呢?这就是动态模式需要做的工作了!
**在动态模式下,**引入了uclass和uclass_driver两个数据结构,实现了对udevice和driver的管理。
看一下uclass和uclass_driver两个结构体的说明:
/**
* struct uclass - a U-Boot drive class, collecting together similar drivers
*
*/
/**
* struct uclass_driver - Driver for the uclass
*
* A uclass_driver provides a consistent interface to a set of related
* drivers.
*
*/
- uclass:设备组公共属性对象,作为
udevice的一个属性,主要用来管理某个驱动类的所有的设备。 - uclass_driver:设备组公共行为对象,
uclass的驱动程序,主要将uclass管理的设备和驱动实现绑定、注册,移除等操作。
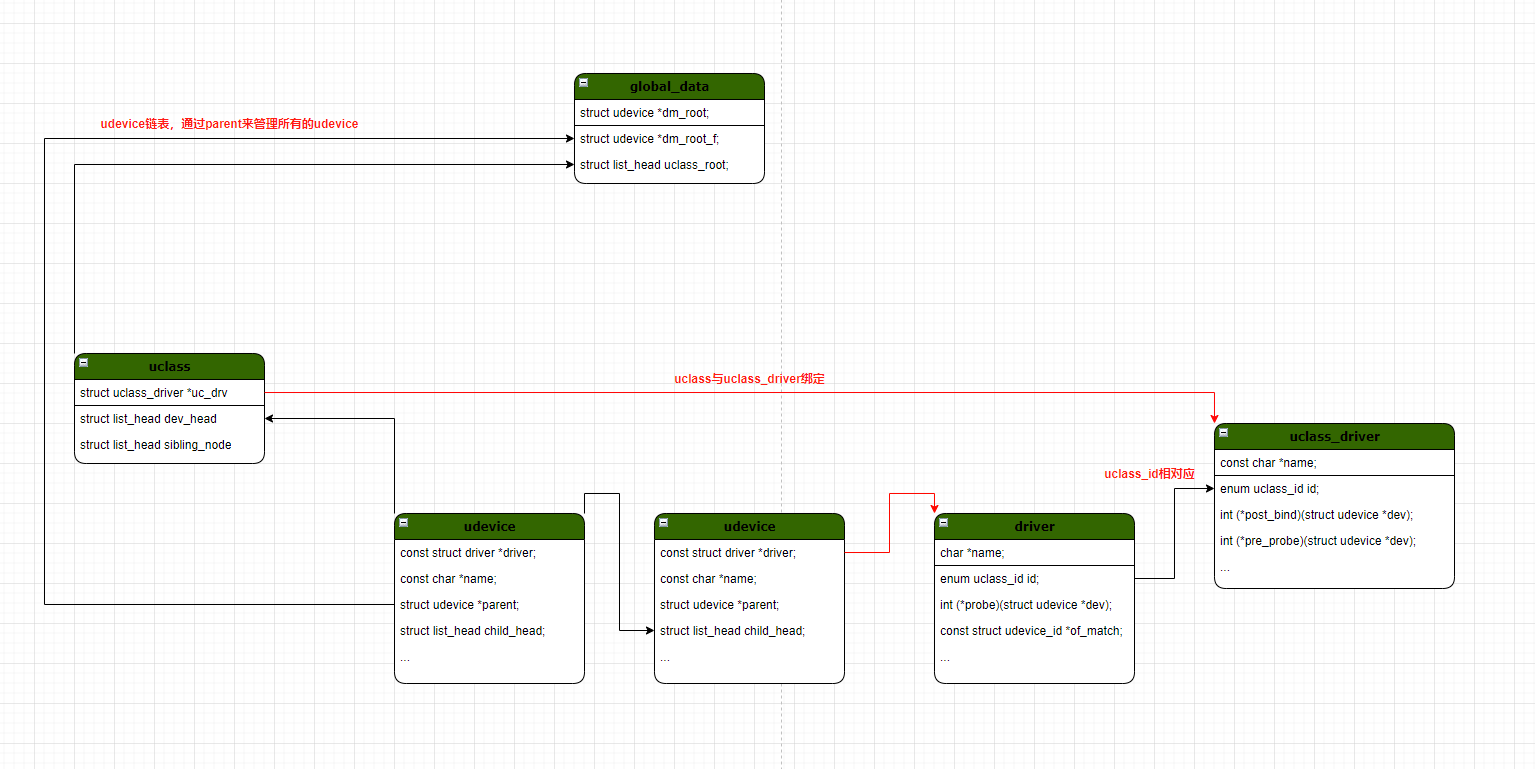
通过这两个结构体的引入,可以将毫不相关的udevice是driver关联起来!
udevice与driver的绑定:通过驱动的of_match和compatible属性来配对,绑定。
udevice与uclass的绑定:udevice内的driver下的uclass_id,来与uclass对应的uclass_driver的uclass_id进行匹配。
uclass与uclass_driver的绑定:已知udevice内的driver下的uclass_id,创建uclass的同时,通过``uclass_id找到对应的uclass_driver对象,然后将uclass_driver绑定到uclass`上!
整体结构如下:
3.6、DM模型——Udevice与driver绑定
相信站在上帝视角看完DM的整体架构,大家都对DM框架有一定了解,下面我们来看看具体的实现细节!
DM的初始化分为两个部分,一个是在relocate重定向之前的初始化:initf_dm,一个是在relocate重定向之后的初始化:initr_dm。
我们对比这两个函数:
static int initf_dm(void)
{
#if defined(CONFIG_DM) && CONFIG_VAL(SYS_MALLOC_F_LEN)
int ret;
bootstage_start(BOOTSTAGE_ID_ACCUM_DM_F, "dm_f");
ret = dm_init_and_scan(true); //这里为true
bootstage_accum(BOOTSTAGE_ID_ACCUM_DM_F);
if (ret)
return ret;
#endif
#ifdef CONFIG_TIMER_EARLY
ret = dm_timer_init();
if (ret)
return ret;
#endif
return 0;
}
static int initr_dm(void)
{
int ret;
/* Save the pre-reloc driver model and start a new one */
gd->dm_root_f = gd->dm_root;
gd->dm_root = NULL;
#ifdef CONFIG_TIMER
gd->timer = NULL;
#endif
bootstage_start(BOOTSTAGE_ID_ACCUM_DM_R, "dm_r");
ret = dm_init_and_scan(false); //这里为false
bootstage_accum(BOOTSTAGE_ID_ACCUM_DM_R);
if (ret)
return ret;
return 0;
}
两个均调用了dm_init_and_scan这个接口,这两个的关键区别在于参数的不同。
- 首先说明一下dts节点中的“
u-boot,dm-pre-reloc”属性,当设置了这个属性时,则表示这个设备在relocate之前就需要使用。 - 当dm_init_and_scan的参数为
true时,只会对带有“u-boot,dm-pre-reloc”属性的节点进行解析。而当参数为false的时候,则会对所有节点都进行解析。
DM初始化的大体步骤如下:
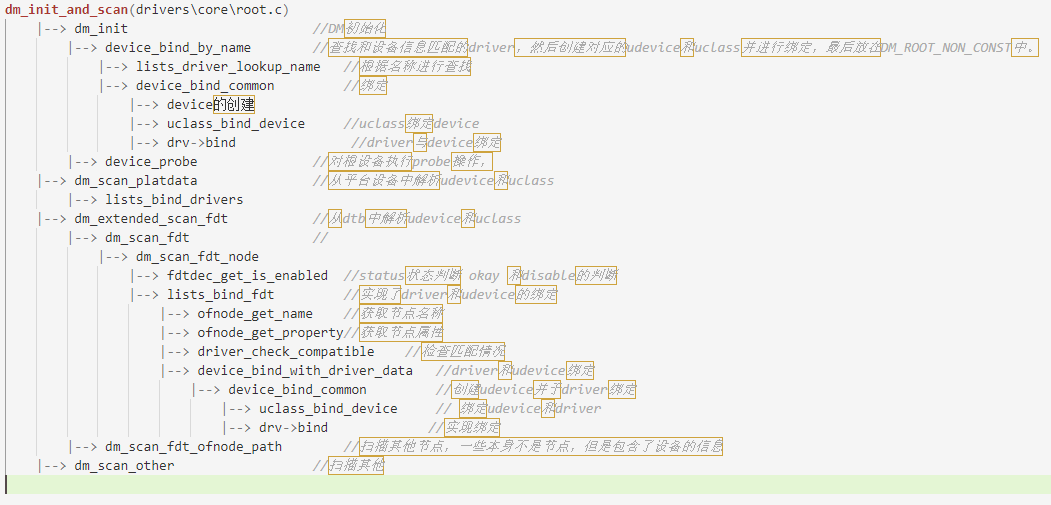
如上程序执行流程图,下面我们详细讲解几个函数。
① dm_init
int dm_init(bool of_live)
{
int ret;
if (gd->dm_root) {
dm_warn("Virtual root driver already exists!\n");
return -EINVAL;
}
INIT_LIST_HEAD(&DM_UCLASS_ROOT_NON_CONST);
#if defined(CONFIG_NEEDS_MANUAL_RELOC)
fix_drivers();
fix_uclass();
fix_devices();
#endif
ret = device_bind_by_name(NULL, false, &root_info, &DM_ROOT_NON_CONST); //查找root_driver驱动,并绑定
if (ret)
return ret;
#if CONFIG_IS_ENABLED(OF_CONTROL)
# if CONFIG_IS_ENABLED(OF_LIVE)
if (of_live)
DM_ROOT_NON_CONST->node = np_to_ofnode(gd->of_root);
else
#endif
DM_ROOT_NON_CONST->node = offset_to_ofnode(0);
#endif
ret = device_probe(DM_ROOT_NON_CONST); //probe激活root_driver驱动
if (ret)
return ret;
return 0;
}
dm_init这个函数,名字起的容易让人误导,这个函数主要做的就是初始化了根设备root_driver,根据这个跟设备,初始化了global_data中的dm_root、uclass_root。
② lists_bind_fdt
我们通常会使用设备树来定义各种设备,所以这个函数才是主角。
这个函数主要用来查找子设备,并且根据查找到的子设备,进而查找对应驱动进行绑定!即:实现了driver和device的绑定。
int lists_bind_fdt(struct udevice *parent, ofnode node, struct udevice **devp,
bool pre_reloc_only)
{
struct driver *driver = ll_entry_start(struct driver, driver); //获得驱动列表的起始地址
const int n_ents = ll_entry_count(struct driver, driver); //获得驱动列表的总数量
const struct udevice_id *id;
struct driver *entry;
struct udevice *dev;
bool found = false;
const char *name, *compat_list, *compat;
int compat_length, i;
int result = 0;
int ret = 0;
if (devp)
*devp = NULL;
name = ofnode_get_name(node);
log_debug("bind node %s\n", name);
compat_list = ofnode_get_property(node, "compatible", &compat_length); //得到compatible属性,用于匹配driver驱动
if (!compat_list) {
if (compat_length == -FDT_ERR_NOTFOUND) {
log_debug("Device '%s' has no compatible string\n",
name);
return 0;
}
dm_warn("Device tree error at node '%s'\n", name);
return compat_length;
}
/*
* Walk through the compatible string list, attempting to match each
* compatible string in order such that we match in order of priority
* from the first string to the last.
*/
for (i = 0; i < compat_length; i += strlen(compat) + 1) {
compat = compat_list + i;
log_debug(" - attempt to match compatible string '%s'\n",
compat);
for (entry = driver; entry != driver + n_ents; entry++) {
//循环判断所有驱动是否匹配
ret = driver_check_compatible(entry->of_match, &id,
compat);
if (!ret)
break;
}
if (entry == driver + n_ents)
continue;
if (pre_reloc_only) {
if (!ofnode_pre_reloc(node) &&
!(entry->flags & DM_FLAG_PRE_RELOC)) {
log_debug("Skipping device pre-relocation\n");
return 0;
}
}
log_debug(" - found match at '%s': '%s' matches '%s'\n",
entry->name, entry->of_match->compatible,
id->compatible);
ret = device_bind_with_driver_data(parent, entry, name,
id->data, node, &dev); //该函数,用于创建udevice对象,并与查找到的driver绑定
if (ret == -ENODEV) {
log_debug("Driver '%s' refuses to bind\n", entry->name);
continue;
}
if (ret) {
dm_warn("Error binding driver '%s': %d\n", entry->name,
ret);
return ret;
} else {
found = true;
if (devp)
*devp = dev;
}
break;
}
if (!found && !result && ret != -ENODEV)
log_debug("No match for node '%s'\n", name);
return result;
}
lists_bind_fdt这个函数,主要用来扫描设备树中的各个节点;
根据扫描到的udevice设备信息,通过compatible来匹配compatible相同的driver,匹配成功后,就会创建对应的struct udevice结构体,它会同时指向设备资源和driver,这样设备资源和driver就绑定在一起了。
3.7、DM模型——probe探测函数的执行
上述,完成了DM模型的初始化,但是我们只是建立了
driver和udevice的绑定关系,那么何时调用到我们驱动中的probe探测函数呢?uclass与driver又何时匹配的呢?
上文呢,dm_init只是负责初始化并绑定了udevice和driver,那么probe探测函数的执行,当然是在该驱动初始化的时候喽!
下文以mmc驱动为例!其初始化流程如下:
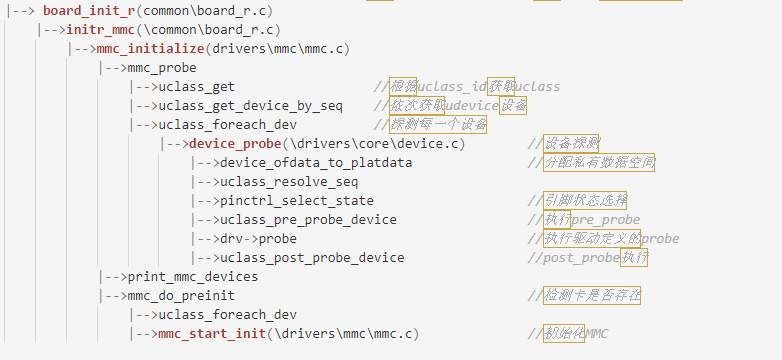
详细代码在这里就不展开来叙述了!
在MMC驱动初始化后,有没有注意到mmc_probe这个函数,该函数就是间接调用了我们驱动编写的probe函数。
执行流程在上面已经很清楚了:根据uclass_id,调用``uclass_get_device_by_seq来得到udevice,进而调用device_probe来找到对应驱动的probe`。
int device_probe(struct udevice *dev)
{
const struct driver *drv;
int ret;
int seq;
if (!dev)
return -EINVAL;
if (dev->flags & DM_FLAG_ACTIVATED)
return 0;
drv = dev->driver; //获取driver
assert(drv);
ret = device_ofdata_to_platdata(dev);
if (ret)
goto fail;
/* Ensure all parents are probed */
if (dev->parent) {
//父设备probe
ret = device_probe(dev->parent);
if (ret)
goto fail;
/*
* The device might have already been probed during
* the call to device_probe() on its parent device
* (e.g. PCI bridge devices). Test the flags again
* so that we don't mess up the device.
*/
if (dev->flags & DM_FLAG_ACTIVATED)
return 0;
}
seq = uclass_resolve_seq(dev);
if (seq < 0) {
ret = seq;
goto fail;
}
dev->seq = seq;
dev->flags |= DM_FLAG_ACTIVATED;
/*
* Process pinctrl for everything except the root device, and
* continue regardless of the result of pinctrl. Don't process pinctrl
* settings for pinctrl devices since the device may not yet be
* probed.
*/
if (dev->parent && device_get_uclass_id(dev) != UCLASS_PINCTRL)
pinctrl_select_state(dev, "default");
if (CONFIG_IS_ENABLED(POWER_DOMAIN) && dev->parent &&
(device_get_uclass_id(dev) != UCLASS_POWER_DOMAIN) &&
!(drv->flags & DM_FLAG_DEFAULT_PD_CTRL_OFF)) {
ret = dev_power_domain_on(dev);
if (ret)
goto fail;
}
ret = uclass_pre_probe_device(dev);
if (ret)
goto fail;
if (dev->parent && dev->parent->driver->child_pre_probe) {
ret = dev->parent->driver->child_pre_probe(dev);
if (ret)
goto fail;
}
/* Only handle devices that have a valid ofnode */
if (dev_of_valid(dev)) {
/*
* Process 'assigned-{clocks/clock-parents/clock-rates}'
* properties
*/
ret = clk_set_defaults(dev, 0);
if (ret)
goto fail;
}
if (drv->probe) {
ret = drv->probe(dev); //调用驱动的probe
if (ret)
goto fail;
}
ret = uclass_post_probe_device(dev);
if (ret)
goto fail_uclass;
if (dev->parent && device_get_uclass_id(dev) == UCLASS_PINCTRL)
pinctrl_select_state(dev, "default");
return 0;
fail_uclass:
if (device_remove(dev, DM_REMOVE_NORMAL)) {
dm_warn("%s: Device '%s' failed to remove on error path\n",
__func__, dev->name);
}
fail:
dev->flags &= ~DM_FLAG_ACTIVATED;
dev->seq = -1;
device_free(dev);
return ret;
}
主要工作归纳如下:
- 根据
udevice获取driver - 然后判断是否父设备被
probe - 对父设备进行probe
- 调用driver的probe函数
3.8、DM模型——uclass与uclass_driver绑定
上述完成了
driver的probe函数调用,基本底层都已经准备好了,uclass何时与uclass_driver绑定,给上层提供统一的API呢?
uclass与uclass_driver绑定,也是在驱动probe之后,确保该驱动存在,设备存在,最后为该驱动绑定uclass与uclass_driver,为上层提供统一接口。
以根据MMC驱动为例
回到上文的驱动流程图,看到mmc_do_preinit这个函数了嘛?里面调用了ret = uclass_get(UCLASS_MMC, &uc);,该函数才是真正的将uclass与uclass_driver绑定。
int uclass_get(enum uclass_id id, struct uclass **ucp)
{
struct uclass *uc;
*ucp = NULL;
uc = uclass_find(id);
if (!uc)
return uclass_add(id, ucp);
*ucp = uc;
return 0;
}
uclass_get主要实现了:根据uclass_id查找对应的uclass是否被添加到global_data->uclass_root链表中,如果没有添加到,就调用uclass_add函数,实现uclass与uclass_driver的绑定,并将其添加到global_data->uclass_root链表中。
static int uclass_add(enum uclass_id id, struct uclass **ucp)
{
struct uclass_driver *uc_drv;
struct uclass *uc;
int ret;
*ucp = NULL;
uc_drv = lists_uclass_lookup(id); //根据uclass_id查找到对应的driver
if (!uc_drv) {
debug("Cannot find uclass for id %d: please add the UCLASS_DRIVER() declaration for this UCLASS_... id\n",
id);
/*
* Use a strange error to make this case easier to find. When
* a uclass is not available it can prevent driver model from
* starting up and this failure is otherwise hard to debug.
*/
return -EPFNOSUPPORT;
}
uc = calloc(1, sizeof(*uc));
if (!uc)
return -ENOMEM;
if (uc_drv->priv_auto_alloc_size) {
uc->priv = calloc(1, uc_drv->priv_auto_alloc_size);
if (!uc->priv) {
ret = -ENOMEM;
goto fail_mem;
}
}
uc->uc_drv = uc_drv; //uclass与uclass_driver绑定
INIT_LIST_HEAD(&uc->sibling_node);
INIT_LIST_HEAD(&uc->dev_head);
list_add(&uc->sibling_node, &DM_UCLASS_ROOT_NON_CONST); //添加到global_data->uclass_root链表中
if (uc_drv->init) {
ret = uc_drv->init(uc);
if (ret)
goto fail;
}
*ucp = uc;
return 0;
fail:
if (uc_drv->priv_auto_alloc_size) {
free(uc->priv);
uc->priv = NULL;
}
list_del(&uc->sibling_node);
fail_mem:
free(uc);
return ret;
}
好啦,到这里基本就把Uboot的DM模型全部理清楚啦,耗时一个周,总感觉想要自己去讲明白,真的不是一件容易的事情呢!
如果对你们有帮助,记得点个赞哦!
3.9参考文档
[1] : https://www.dazhuanlan.com/archevalier/topics/1323360
[2] : https://blog.csdn.net/ooonebook/article/details/53234020